Als PDF, PPTX herunterladen
![Pfadplanung
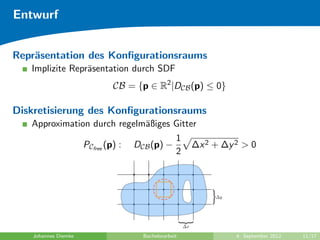
Konfigurationsraum
Reduzieren einer Pose auf einen Punkt im Konfigurationsraum
Freier Konfigurationsraum:
Cfree = C
i∈{1,...,n}
{q ∈ C | A(q) ∩ Bi = ∅}
Freier Pfad τ : [0, 1] → Cfree, τ(0) = q1, τ(1) = q2
Johannes Diemke Bachelorarbeit 4. September 2012 5/17](https://image.slidesharecdn.com/ba-diemke-prsentation-130629202032-phpapp01/85/Pfadplanung-mit-harmonischen-Potentialfeldern-5-320.jpg)
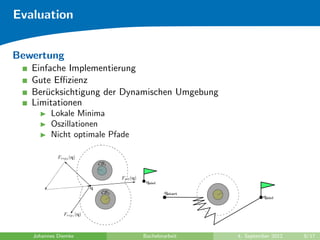
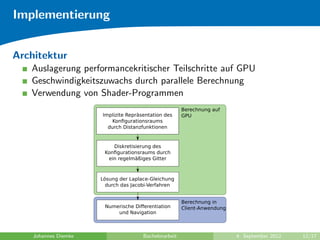
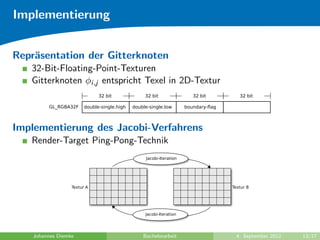

Die Bachelorarbeit von Johannes Diemke behandelt die Verbesserung der Pfadplanung mit harmonischen Potentialfeldern für die Navigation in 2D-Simulationen. Es werden Anforderungen an die neue Methode erörtert, die auf Harmonie und Robustheit abzielen, sowie die Implementierung und Bewertung eines Prototyps, der Echtzeitfähigkeit bietet. Der Entwurf zielt darauf ab, Probleme wie lokale Minima und Oszillationen zu vermeiden und nutzt Technologien wie GPU-Berechnung zur Leistungssteigerung.