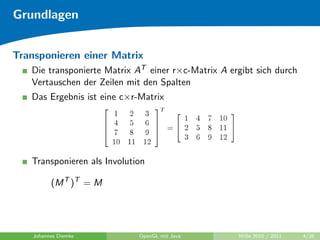
Downloaden Sie, um offline zu lesen

![Lineare Transformationen
Wie transformiert eine Matrix einen Vektor? (Forts.)
v hat im neuen System immer noch dieselben Komponenten wie v
Bzgl. des [e1 , e2 , e3 ]-Systems haben sie sich aber ge¨ndert
a
Johannes Diemke OpenGL mit Java WiSe 2010 / 2011 14/26](https://image.slidesharecdn.com/2010-jogl-05-transformationen-120724145320-phpapp02/85/2010-JOGL-05-Transformationen-14-320.jpg)
![Lineare Transformationen
Wie transformiert eine Matrix einen Vektor? (Forts.)
Die Komponente des Vektors v im [e1 , e2 , e3 ]-Systems ergeben sich
zu
v = xa1 + y a2 + za3
Das l¨ßt sich aber pr¨gnanter durch eine Matrixmultiplikation
a a
ausdr¨cken
u
a1x a2x a3x x
v = a1y a2y a3y y = Av
a1z a2z a3z z
Johannes Diemke OpenGL mit Java WiSe 2010 / 2011 15/26](https://image.slidesharecdn.com/2010-jogl-05-transformationen-120724145320-phpapp02/85/2010-JOGL-05-Transformationen-15-320.jpg)
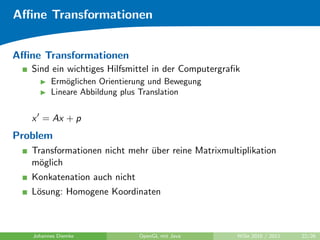
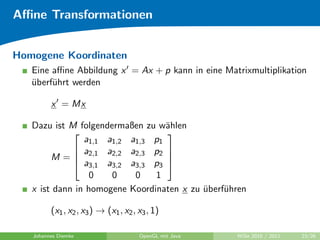
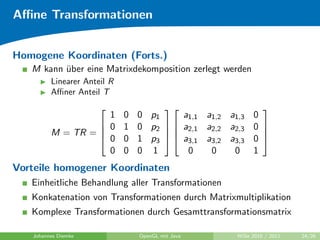

Das Dokument behandelt grundlegende Transformationen in der Computergrafik, einschließlich linearer und affiner Abbildungen durch Matrizen. Es erläutert Konzepte wie Matrixmultiplikation, Skalierung, Rotation und die Verwendung homogener Koordinaten zur Umsetzung von Transformationen. Die theoretischen Grundlagen und mathematischen Prinzipien werden mit praktischen Anwendungen in OpenGL und Java verknüpft.


























