Downloaden Sie, um offline zu lesen
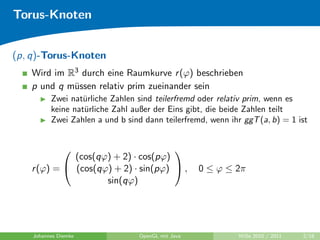
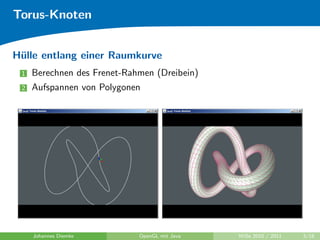
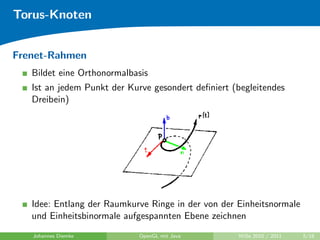
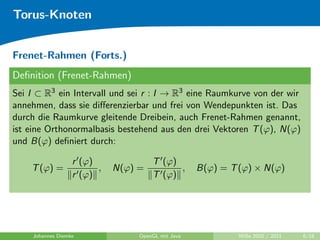
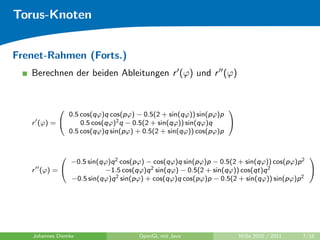
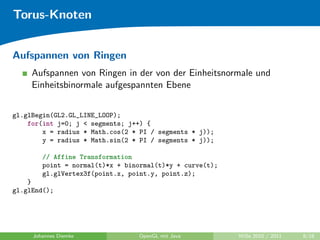
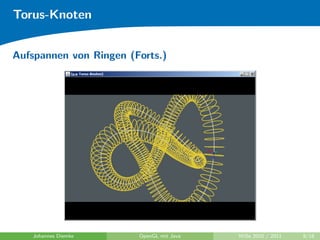
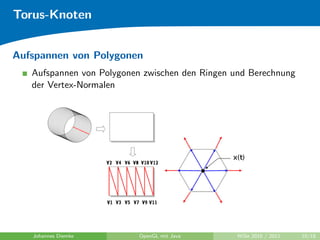
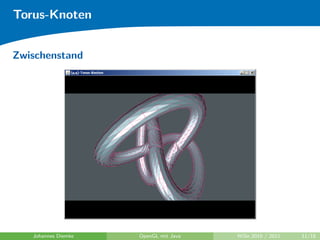
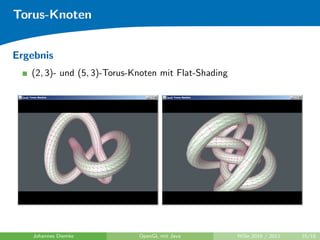
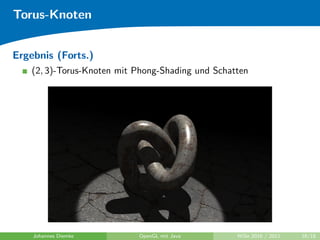

Das Dokument beschreibt die Implementierung von Torus-Knoten in OpenGL mit Java, einschließlich der Berechnung von Raumkurven und dem Aufspannen von Polygonen. Es erläutert Konzepte wie den Frenet-Rahmen und die Fehleranfälligkeit bei der Berechnung von Tangenten und Normalen. Darüber hinaus werden verschiedene berechnete Ergebnisse und Literaturhinweise zu OpenGL und Grafikprogrammierung gegeben.















![Tabla%20de%20transformadas%20de%20 laplace[1]](https://cdn.slidesharecdn.com/ss_thumbnails/tabla20de20transformadas20de20laplace1-110914231251-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)