Die Diplomarbeit von Andreas Dei an der Hochschule Bremen beschreibt die Entwicklung und Erprobung eines Autopiloten mit einer inertialen Messeinheit (IMU) für mikro- und schwebeflugfähige Geräte. Durch den Einsatz von MEMS-Sensoren, wie Gyroskopen und Beschleunigungssensoren, wird eine präzise Lagebestimmung ermöglicht, während der Autopilot die gesammelten Daten verarbeitet und die Steuerung übernimmt. Die Arbeit fördert das Konzept freier Software und Hardware, indem alle Ergebnisse und Entwicklungen unter der GPL zur Verfügung gestellt werden.









![3 Funktionsfestlegung 13
• Kompass
o Auf Sensorplatine integriert oder extern?
o Wenn extern mit eigener Intelligenz?
• Kompatibilität
o Sensorplatine muss an Paparazzi Tiny 13 [13] anschließbar sein.
• Platinenbreite 35mm, max 40mm, vier 3mm Befestigungsbohrungen in
quadratischer Anordnung mit 30mm Abstand
Als Schnittstelle zwischen der IMU und der MCU wurde die SPI Schnittstelle gewählt.
Sie ist in der Lage die geforderten Datenmengen zu transportieren. Ebenso sind die im
ersten Gespräch favorisierten Analog-Digital-Umsetzern MAX1168 [D14] ebenfalls mit
einer SPI Schnittstelle ausgestattet, so dass es bei Verwendung der MAX1168 die
Verwendung der SPI obligatorisch wäre. Zusätzlich zu den eigentlichen Signalen der
SPI Schnittstelle müssen weiterhin Leitungen für die Chip-Select-Signale vorgesehen
werden. Am SPI Bus benötigt jeder angesteuerte Baustein zusätzlich zu den
Datenleitungen noch ein Chip-Select-Signal um den Baustein auszuwählen. Jedes
bislang verwendete Controllerboard verfügt über eine herausgeführte SPI Schnittstelle
sowie über genügend Datenleitungen, so dass die geforderte Kompatibilität gegeben ist.
Zusätzlich bestand der Wunsch, dass die analogen Signale der Sensoren auf Steckleisten
geführt werden, so dass von einem externen Controllerboard auch die analogen Signale
unabhängig von der SPI Schnittstelle ausgewertet werden könnten. Außerdem ist so ein
leichter Test der analogen Signale leichter möglich.
Im Fall der Beschleunigungssensoren und der Gyroskope war es erwünschenswert,
unterschiedliche Messbereiche auf allen Achsen und wenn möglich, auch auf den
verschiedenen Achsen verschiedenen Messbereiche zu ermöglichen. Im Fall der
Beschleunigungssensoren ist daher vermutlich eine Lösung mit 2 Sensoren vorzusehen.
Die Auswahl der Sensoren bedurfte noch einem genauen Vergleich der Eigenschaften
der auf dem Markt befindlichen Sensoren was in Kapitel 4 Sensorauswahl näher
erläutert wird.
3.2 Rechnerplatine
Die Auswahl des geeigneten Mikrocontrollers für die Rechnerplatine stellte einige
Probleme dar. In ersten Überlegungen wurden drei Mikrocontrollertypen favorisiert. In
die nähere Auswahl kamen dabei der bereits eingesetzte und bekannte LPC2148 von
NXP, die größeren Varianten des LPC2148, LPC2214 bzw. LPC2294 ebenfalls von
NXP, sowie der TMS320F28335 von Texas Instruments. Tabelle 3.1 zeigt in Kurzform
die Vor- und Nachteile, eine genauere Beschreibung erfolgt in Absatz 3.2.1 - 3.2.3.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-13-320.jpg)

![3 Funktionsfestlegung 15
Bild 3.1: Blockschaltbild LPC2148 [D7]
3.2.2 Rechnerplatine 2 (LPC2214 / LPC2294)
Der LPC2214/LPC2294 ist ein dem LPC2148 ähnlicher Prozessor, er besitzt jedoch
keinen internen RAM und Flash Speicher. RAM und Flash muss in externen Bausteinen
angegliedert werden. Somit ergibt sich der Vorteil von mehr als ausreichendem
Speicherplatz. Ebenso stehen durch mehr Pins des LPC2214 mehr I/O Leitungen zur
Verfügung, was wiederum dem Mangel an I/O Leitungen entgegen wirkt. Der LPC2214
und LPC2294 sind zueinander sehr ähnlich, als Hauptunterschied besitzt der LPC2294](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-15-320.jpg)
![3 Funktionsfestlegung 16
einen integrierten CAN Controller. Problematisch ist hier jedoch auch der Umstieg auf
einen neuen, wenn auch ähnlichen Prozessortyp, der Probleme in der Zeitplanung der
Arbeit verursachen könnte. So bestehen keinerlei Erfahrungen über externe Speicher.
Der Umstieg auf diesen Prozessor wäre somit auch mit einem Risiko der Nichtfunktion
behaftet. Bild 3.2 zeigt das Blockschaltbild des LPC2294
Bild 3.2: Blockschaldbild LPC2294 [D9]](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-16-320.jpg)

![3 Funktionsfestlegung 18
Bild 3.3: Blockschaltbild TMS320F28335 [D10]](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-18-320.jpg)
![3 Funktionsfestlegung 19
3.2.4 Auswahl Rechnerplatine
Die Wahl fiel schließlich auf die konservative Variante mit dem LPC2148, da hier die
größten Chancen gesehen wurden, in der gegeben Zeit ein flugfähiges System zu
konstruieren. Das bestehende Problem der zu wenigen I/O-Leitungen wurde zuvor
durch eine Abschätzung der benötigten und vorhanden Leitungen überprüft um
sicherzustellen, dass genügend I/O Leitungen zur Verfügung stehen um das Projekt zu
realisieren. Das Ergebnis der Abschätzung zeigte, dass die Zahl ausreichen sollte. Die
fehlende Rechenleistung sollte durch die Möglichkeit ausgeglichen werden über die
zweite SPI Schnittstelle ein fertiges Rechnermodul, z.B. ein ARM9 Board, anschließen
zu können, das rechenintensive Aufgaben übernimmt und mit dem LPC2148
kommunizieren kann.
3.3 Netzteil
In der Funktionsfestlegung wurde ebenso festgelegt, dass das 5V Netzteil, welches mit
dem Schaltregler PTH08080 [D15] aufgebaut sein sollte, zusammen mit dem
Zählerbaustein zu Servosignaldekodierung so auf der MCU Platine anzuordnen, das es
auch von dieser getrennt betrieben werden kann, falls sich durch den Schaltregler
Störungen in der Sensorik ergeben sollten. Im Falle von Störungen kann somit der
Schaltregler weiter entfernt von der Sensorik montiert werden. Die Möglichkeit zu
Trennung sollte so konzipiert werden, dass beide Leiterplatten zusammen als eine
hergestellt werden können und auch eine elektrische Verbindung zwischen ihnen
besteht. Beide Leiterplatten sollen sich durch einen einfach Schnitt trennen lassen, die
elektrischen Verbindungen sollen dann über zwei Stecker per Kabel herstellbar sein
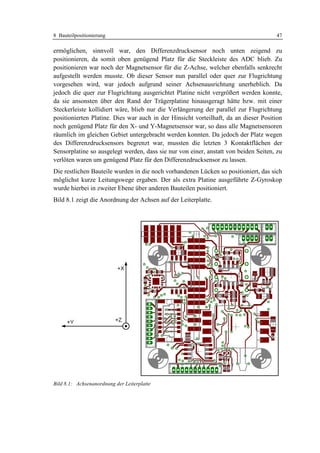
3.4 Anordnung der Platinen
Durch die Verwendung von zwei Leitplatten für IMU und MCU stellte sich die Frage
nach einer sinnvollen Anordnung dieser Leiterplatten. Nach ersten Überlegungen beide
Leiterplatten hintereinander zu reihen, was zu einer langen, schmalen Leiterplatte
geführt hätte, wurde die Variante, beide Leiterplatten zu stapeln, bevorzugt, da diese
Variante kompakter ist.
Erste Überlegungen, die MCU unten und die IMU oben anzuordnen, wurden schnell
verworfen, da sich eine ungünstige Kabelführung ergeben würde. Alle Kabel müssten
seitlich an die MCU angeschlossen werden, was den praktischen Platzbedarf in der
Breite erheblich vergrößert hätte. Die MCU oben zu platzieren würde den Vorteil
bringen, dass alle Kabel auf der Oberseite von oben gesteckt werden könnten. Die IMU
besitzt keine für den normalen Flugbetrieb nötigen Steckverbinder, somit ist es nicht
nachteilig sie unten zu positionieren. Außerdem kann der zwangsläufig bei einem Stapel
durch die Steckverbinder entstehende Zwischenraum durch die ebenfalls hohen
senkrechten Platinen genutzt werden, so dass der Raum optimal ausgenutzt werden
kann und sich keine großen Zwischenräume bilden.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-19-320.jpg)
![4 Sensorauswahl 20
4 Sensorauswahl
4.1 Gyroskope
Für die Auswahl der Gyroskope wurden zunächst per Internetrecherche auf dem Markt
erhältliche MEMS Gyroskope erfasst.
Folgende Gyroskope sind derzeit auf dem Markt erhältlich (Typ, Hersteller):
• IDG-300 [D16], InvenSens
• ENC-03J [D17], Murata
• ADXRS150/300 [D18/19], Analog Devices
• ADXRS61X Series [D4], Analog Devices
• LISY300AL [D20], ST Microelectronics
• MLX90609-R2 [D21], Melexis
Um die Eigenschaften miteinander vergleichen zu können, wurden die wichtigsten
Kenndaten in Tabelle 21.1 (siehe Anhang) eingetragen. Besonders zu beachten sind
hierbei der Temperaturdrift, die Nichtlinearität, sowie die Rauschdichte, da diese bei zu
schlechten Werten die Funktion der IMU gegebenenfalls beeinträchtigen oder
verhindern.
Die Auswertung der Tabelle 21.1 kommt zu folgenden Ergebnissen für die einzelnen
Gyroskope:
• IDG-300, InvenSens
o Vorteile: Günstig beschaffbar; 2-Achsig, zusammen mit einem Z-Gyro
kann eine IMU ohne senkrecht aufgestellte Platinen realisiert werden;
geringes Rauschen.
o Nachteile: Sehr hoher Temperaturdrift, große Nichtlinearität.
• ENC-03J, Murata
o Vorteile : leicht beschaffbar, viele Erfahrungen in der Verwendung für
IMU’s vorhanden
o Nachteile: große Bauform, ungünstige Achsenanordnung,
schlagempfindlich, sehr hoher Temperaturdrift
• ADXRS150/300, Analog Devices
o Vorteile : Sehr gute Werte
o Nachteile: hoher Preis; schwer zu beschaffen; ADXRS300 ist bereits
abgekündigt; BGA Gehäuse](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-20-320.jpg)
![4 Sensorauswahl 21
• ADXRS61X Series, Analog Devices
o Vorteile : Sehr gute Werte, geringster Temperaturdrift und geringste
Nichtlinearität aller untersuchten Sensoren; RatioMetric Eingang,
ermöglicht Anpassung der Ausgangsspannung an die Referenzspannung
des ADC; in gleicher Bauart mit unterschiedlichen Messbereichen
erhältlich
o Nachteile: hoher Preis; schwer zu beschaffen; BGA Gehäuse
• LISY300AL, ST Microelectronics
o Vorteile: günstig und gut beschaffbar
o Nachteile: geringe Oszillatorfrequenz, die in anderen Projekten schon zu
Problemen durch Beeinflussen durch Motorvibrationen geführt hat [4].
• MLX90609-R2, Melexis
o Vorteile: Preiswert, von Hand verlötbar
o Nachteile: sehr große Bauform
Die Wahl viel schließlich trotz des hohen Preises und der schlechten Beschaffbarkeit
auf die ADXRS61X Serie. Begründet liegt dies in den sehr guten Werten, sowie in
guten Erfahrungen, die von anderen Projektgruppen mitgeteilt wurden [2, 5]. Für den
Prototypen konnte das Beschaffungsproblem dadurch verhindert werden, dass gesamt
acht Sample des ADXRS610 von Analog Devices erhalten werden konnten. Aufgrund
des BGA Gehäuses ist jedoch ein Prozess zu entwickeln, der es ermöglicht diese
Sensoren mit Hochschulmitteln zu verarbeiten.
Jedoch wurde während der Auswahl der Gyroskope beschlossen, eine Möglichkeit zu
schaffen, verschiedene Typen nutzen zu können. Dadurch, dass zwei der Sensoren auf
senkrecht gestellte Platinen montiert werden müssen, kann hier ein Austausch durch den
Tausch der gesamten senkrechten Platinen erfolgen. Für den Z-Gyro, der
normalerweise direkt auf die Hauptplatine bestückt werden würde, wurde in diesem Zug
festgelegt, ihn auf eine kleinen Platine zu montieren, die wiederum auf die Hauptplatine
bestückt wird. Als Ersatz sollen daher ebenso die LISY300AL und die MLX90609-R2
verwendbar sein.
4.2 Beschleunigungssensoren
Die Auswahl der Beschleunigungssensoren erfolgte auf gleiche Art und Weise wie die
bei den Gyroskopen.
Von bekannten Herstellern wurden Sensoren herausgesucht und die wichtigsten Daten
in Tabelle 21.2 und Tabelle 21.3 (siehe Anhang) zusammengefasst. Besonderes
Augenmerk bei dem Vergleich lag hier bei dem Temperaturdrift, Nullpunktdrift,](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-21-320.jpg)
![4 Sensorauswahl 22
Nichtlinearität und Achsenübersprechen. Zur besseren Übersicht und Einschätzung der
Werte wurde eine farbliche Kennzeichnung vorgenommen, die einen Vergleich unter
allen Sensoren darstellt. So wurden die besten Werte grün, die schlechtesten Werte rot
eingefärbt. Werte im Zwischenbereich wurden gelb und orange eingefärbt.
Die Auswertung ergab, dass die Sensoren von Analog Devices den besten
Gesamteindruck vermittelten. Die Sensoren von ST Microeletronics vermittelten
insgesamt auch kein schlechtes Bild und hätten bei einigen Bausteinen eine einfach
Umschaltung des Messbereiches von 2 oder 6g ermöglicht. Insgesamt überzeugten die
Analog Devices Sensoren jedoch mehr. Hinzu kam noch das in einem Probeaufbau
einer IMU innerhalb des Labors der verwendetet ST Sensor einen massiven
Empfindlichkeitsfehler zeigte.
Die genauere Auswahl fiel schließlich auf eine Kombination des ADXL330 [D22],
ADXL320 [D23]und ADXL323 [D24]. Je nach Kombination können die Achsen somit
auch in unterschiedlichen Messbereichen vermessen werden. Die Art der Kombination
wurde im Design ermittelt.
4.3 Luftdruck (statisch)
Die Vorgaben für den statischen Luftdrucksensor waren durch einen Messbereich von 0
– 115kPa gegeben. Zusätzlich sollte aus Platzspargründen das kleinste erhältliche
Gehäuse zum Einsatz kommen.
Zur Auswahl standen hier einige Sensoren der Firma Freescale Semiconducters.
• MPX4100 Series
• MPX4115 Series
• MPXA / MPXH 6115 Series
Die elektrischen Daten der Sensoren unterscheiden sich untereinander nicht oder nur
minimal, so dass hier keine Unterscheidung nötig ist. Einzig verfügen die Sensoren der
4xxx Serie über einen Spannungsausgang, während die Sensoren der 6xxx Serie über
einen Stromausgang verfügen, aus dem erst mittels Widerstand eine Spannung erzeugt
werden muss.
Bei den Sensoren der 4115 Serie handelt es sich ausschließlich um konventionelle
bedrahtete Gehäuse mit großen mechanischen Abmessungen, daher scheidet dies Serie
aus.
Die 4100 Serie ist in bedrahten wie auch in SMD Gehäusen der Bauform SOP (Small
outline Package) erhältlich.
Sensoren der 6115 Serie mit dem Buchstabenkürzel MPXA sind in einem SOP Gehäuse
untergebracht während Sensoren mit dem Kürzel MPXH in einem SSOP (Super Small
Outline Package) untergebracht sind. Zusätzlich sind diese Sensoren in einer Version](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-22-320.jpg)
![4 Sensorauswahl 23
für erhöhte Luftfeuchtigkeitsanforderungen erhältlich, die durch den Zusatz Z an der
Buchstabenkombination gekennzeichnet sind.
Da die MPXH6115 [D25] Sensoren im kleinsten Gehäuse lieferbar sind wurden diese
ausgewählt. Für besondere klimatische Verhältnisse kann auch der MPXHZ6115
eingesetzt werden. Zusätzlich sind zwei unterschiedliche Gehäuseformen erhältlich, die
sich durch einen Stutzen zum Schlauchanschluss (MPXH6115AC6U/C6T1) und planer
Ausführung ohne Stutzen MPXH6115A6U/6T1 unterscheiden.
4.4 Luftdruck (Differenz)
Zur Fahrtmessung an Flächenfluggeräten sollte ein Differenzdrucksensor zur
Auswertung eines Staudruckrohrs vorgesehen werden, der so ausgelegt sein sollte um
Geschwindigkeiten bis ca. 20m/s messen zu können.
Hierzu war zuerst zu ermitteln, welche Drücke bei entsprechender Geschwindigkeit
auftreten um den Messbereich entsprechend auszuwählen. Über umgewandelte Form
der Bernoulli-Gleichung (4.1) [6] ist dies möglich.
1
p = * ρ * v2 (4.1)
2
Die Dichte von Luft wird mit 1,27kg/m³ angenommen, somit ergibt sich bei einer
maximalen Geschwindigkeit von 20m/s eingesetzt nach (4.2) ein maximaler Druck von
2,58mbar
1 kg m2
P = *1,27 3 * 20 2 2 = 258 Pa = 2,58mbar (4.2)
2 m s
Eine Recherche des Angebots der Differenzdrucksensoren von Freescale ergab, dass der
MPXV7002 [D26] mit 2kPa entsprechend 20mbar, den kleinsten Messbereich der
angebotenen Sensoren besitzt. Dies beträgt noch immer das 10-fache des zu
erwartenden Anwendungsmaximums. Eine Alternative bestand im Sensor
HCLA02X5EU von Sensortechnics mit einem Messbereich von 2,5mbar. Dieser Sensor
hatte jedoch einen sehr hohen Preis, so dass gegen ihn entschieden wurde und der
Messbereich des MPXV7002 durch nachfolgende Elektronik angepasst werden sollte.
In der Projektarbeit [7] wurde bereits die Fahrtmessung per Staudruckrohr und
Differenzdrucksensor untersucht. Dort wurde als Sensor ein MPX2010 mit 10kPa
Messbereich verwendet. Hier wurde ebenfalls auf den in diesem Fall noch](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-23-320.jpg)
![4 Sensorauswahl 24
ungünstigeren Messbereich hingewiesen. Durch die nachfolgende Verstärkerschaltung
konnte das gewünschte Signal aber einwandfrei erzeugt werden. In diesem Projekt
wurden ebenfalls Versuche zum erwartenden Druck durchgeführt, die im Bereich der
zur Dimensionierung verwendeten Berechnungen liegen.
4.5 Magnetometer
Als Magnetsensoren standen zum einen der MicroMag3 als fertiges Modul zur
Verfügung wie auch eine Schaltungsvariante mit drei KMZ51 Hall-Sensoren [D11],
entwickelt von Holger Buss [8], basierend auf einem Applikationsbereicht von NXP
[D12]
Der MicroMag3 ist ein fertiges Modul [D13], welches über die SPI Schnittstelle
angesprochen wird. Hier besteht jedoch der Nachteil, dass er ein sehr langsamer
Baustein ist, der in seiner Messzeit den SPI Bus nicht frei gibt, so dass keine sichere
Datenerfassung von den flugwichtigen Sensoren mehr möglich ist. Hier muss daher
überlegt werden den MicroMag3 an einen anderen SPI BUS als die Sensoren
anzuschließen oder den MicroMag3 mit einem eigenen kleinen Mikrokontroller zu
versehen, der den MicroMag3 über den SPI ansteuert und die Daten per I²C an die
MCU weitergibt. Die Montage des MicroMag3 direkt auf der IMU Platine scheidet
aufgrund seines großen Bauvolumens aus, so dass er auf jeden Fall als externes Modul
vorzusehen ist.
Die Variante mit den KMZ51 Sensoren ließe sich direkt mit auf die IMU integrieren.
Jedoch besteht hier die Gefahr, dass Magnetfelder oder magnetische Komponenten die
Sensoren beeinflussen. Um dies zu überprüfen wurden im Vorfeld Untersuchungen mit
einem fertigen Modul nach [8] durchgeführt. Hierzu wurden die analogen
Ausgangssignale der Sensoren gemessen und die Auswirkungen der verschiedenen
Bauteile untersucht. Als kritische Bauteile wurden vor allem die Luftdrucksensoren
(wegen einer Edelstahlplatte im Deckel) und der Schaltregler angesehen. Festgestellt
werden konnte, dass keiner von beiden Luftdrucksensoren eine Auswirkung auf die
Magnetsensoren hatte, der Schaltregler war jedoch in der Lage bei großer
Stromentnahme in unmittelbarer Nähe die Sensoren geringfügig zu beeinflussen. Da
jedoch der Regler ein vielfaches von der Entfernung, in der er Störungen verursacht,
entfernt ist, ist eine Verfälschung der Messergebnisse unwahrscheinlich.
Aufgrund der höheren Kompaktheit mit weniger externen Modulen und
entsprechendem Kabelaufwand erschien die Variante mit den KMZ51 direkt auf der
IMU als sinnvoller. Falls es jedoch wider erwarten zu Störungen kommen sollte, die
eine Auswertung der Magnetfeldlinien verhindern, sollte es möglich sein, sowohl den
MM3 als auch ein Modul mit den KMZ51 extern anzuschließen. Hierzu muss somit die
I²C und die zweite SPI Schnittstelle von außen nutzbar sein, sowie ein I/O Pin für
Steuerzwecke zur Verfügung stehen. Dieses wurde der Planung der Steckerleisten für
die Schnittstellen mitbedacht.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-24-320.jpg)
![5 Bauteilauswahl 25
4.6 Temperatur
Für den Temperatursensor war ein Mindestmessbereich von –30°C - +60°C bei einer
Genauigkeit von < 1% bei 25°C vorgegeben. Da der Temperatursensor eine späte
Erweiterung darstellte, die erst nach Beendigung des Platinenlayouts geplant wurde,
kam nur ein analoger Sensor in einem möglichst kleinen Gehäuse in Frage, da kaum
Platz mehr zur Verfügung stand und ebenso der Platz für einen digitalen Bus nicht
gegeben war.
Die Auswahl eines geeigneten Temperatursensors erfolgte über die Digikey [9]
Homepage und deren Produktkatalog nach folgender Strategie:
Produktkatalog → Sensoren, Transducer → Temperatur → Filter: Analog, Artikel auf
Lager.
Eine weitere Selektion erfolgte über das Gehäuse. Als Gehäusebauformen, die klein
genug waren um doch auf der Platine positioniert werden zu können, zeigten sich 4-
MicroSMD, SOT23-5, SOT23-6 sowie SC70-5.
Im 4-MicroSMD war der LM20 erhältlich, welcher aufgrund seiner nicht ausreichenden
Genauigkeit von 1,5% ausschied, zudem ist das 4-MicroSMD Gehäuse schwer zu
verarbeiten.
Der im SOT23-5 erhältliche MAX6608 schied durch die nicht ausreichende
Genauigkeit von 2% aus.
Der im SOT23-6 erhältliche MAX6611 ist nur in großen Stückzahlen lieferbar.
Von den unter SC70-5 aufgelisteten Bauteile erreichte schließlich nur der MAX6605
[D6] die geforderte Genauigkeit von unter 1%. Erste Wahl wäre somit der MAX6605,
da dieser jedoch recht teuer ist, wurde versucht eine preisgünstige Alternative zu
ermitteln. Hier fiel dann die Wahl auf den LM20 [D27], der bei bestimmtem Layout, als
Pinkompatibel angesehen werden kann.
5 Bauteilauswahl
5.1 Analog-Digital-Umsetzer
Als Analog-Digital-Umsetzer für die Signale der Beschleunigungs- und
Drehratensensoren, sowie die Signale der anderen Sensoren werden hochauflösende
Typen mit einer möglichst hohen Kanalanzahl benötigt. Die Wahl fiel hierbei auf den
MAX1168 [D14] von Maxim. Dieser ADC besitzt eine Auflösung von 16-Bit, 8-Kanäle
und ist durch sein Umsetzverfahren der sukzessiven Approximation schnell, das
Messergebnis steht sofort im Anschluss der Messanfrage zur Verfügung. Er wurde](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-25-320.jpg)
![5 Bauteilauswahl 26
bereits für vorausgegangene Projekte erfolgreich verwendet [1], ebenso existieren für
ihn bereits die nötigen Softwaretreiber.
Zur Auswertung des Absolutluftdrucks wird eine höhere Auflösung als 16-Bit benötigt,
um auch Höhenänderungen im cm-Bereich erfassen zu können. Der in früheren
Projekten verwendete einkanalige 24Bit Umsetzer LTC2400 [D2] von Linear
Technology erwies sich hierbei als sehr langsam. Als schnellerer 24Bit Umsetzer ist
ebenfalls bei Linear Technology der LTC2440 [D1] erhältlich. Im Gegensatz zum
LTC2400, der mit einer festen Genauigkeit und damit festen
Konvertierungsgeschwindigkeit arbeitet, kann der LTC2440 durch ein per SPI
gesendetes Kommandowort auf verschiedene Genauigkeiten und damit
Konvertierungsgeschwindigkeiten umgestellt werden. Die erreichbare
Konvertierungsgeschwindigkeit des LTC2440 ist abhängig von der Genauigkeit mit der
die Konvertierung erfolgen soll. Je weniger Zeit für einen Konvertierungsvorgang zur
Verfügung steht, je geringer ist die Genauigkeit. Die Geschwindigkeit ist jedoch im
Vergleich mit dem LTC2400 bei gleicher Genauigkeit von 24Bit erheblich höher
(~37ms LTC2440 [D1, S.14], ~133,3ms LTC2400 [D2. S.4]).
5.2 Spannungsversorgung
Als Vorgabe für die Spannungsversorgung war festegelegt, dass beide Platinen mit
einer einzigen Spannung versorgbar sind. Dabei sollte die Eingangsspannung möglichst
hoch sein, im Idealfall geeignet für fünf Lithium Polymer Zellen. Die Nennspannung
von Lithium-Polymer-Zellen beträgt 3,7V, kann jedoch bis 4,3V ansteigen. Auf 5
Zellen ergibt dies eine Nennspannung von 18,5V bzw. 21,5V [10]. Es sollte somit eine
maximale Eingangsspannung von 23V möglich sein.
Beide Platinen benötigen zum Betrieb eine analoge und digitale Spannungsversorgung
mit je 3,3V und 5V.
Zur Abschätzung des ungefähren Strombedarfs wurden die Verbraucher der IMU in
Tabelle 5.1 gelistet.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-26-320.jpg)
![5 Bauteilauswahl 27
Tabelle 5.1: Stromaufnahme der IMU Komponenten
Verbraucher Digital 3,3V Digital 5V Analog 3,3V Analog 5V
ADXRS610 - 3x 5mA - 3x 3mA
ADXL320 - - 0,48mA -
ADXL330 - - 0,32mA -
MPXH6115 - - - 10mA
MPXV7002 - - - 10mA
TLC2262 - - - 0,5mA
LTC2440 - 11mA - 1mA
MAX1168 1,5mA - - 4mA
TLC2264 - - - 0,5mA
KMZ51 - ca. 10mA - ca. 10mA
74HC138 - 0,08mA - -
MAX6605 - - 0,01mA -
1,5mA 36,08mA 0,81mA 45mA
Als Spannungsregler für die analogen Spannungen sollten spezielle rauscharme
Spannungsregler zum Einsatz kommen. Die Suche nach geeigneten Reglern stellte sich
insofern als schwierig heraus, da alle für solche Anwendungen in Frage kommenden
Spannungsregler nicht den geforderten Eingangsspannungsbereich besitzen. In der
Regel sind diese Regler nur bis 16V, in seltenen Fällen bis 20V, konzipiert.
Ausführliche Recherche bei diversen Anbietern ergab, dass der LT1761 [D3] von
Linear Technology der Spannungsregler mit dem größten Eingangsspannungsbereich
ist. Dieser Regler ist für maximal 20V konzipiert und damit aber auch unter der
geforderten Spannung. Jedoch sind keine anderen Regler auf dem Markt. Aus diesem
Grund muss die zur Versorgung verwendete LiPo Zellenzahl von fünf auf vier gesenkt
werden. Sollen mehr als vier Zellen verwendet werden ist ein Vorsatz vorzuschalten,
der die Spannung reduziert. Die maximale Stromentnahme des LT1761 beträgt 100mA
was für die Anwendung ausreichend ist. Kritisch ist jedoch die auftretende
Verlustleistung bei der höchsten anzunehmenden Eingangsspannung, sie beträgt nach
553,5mW.
I out (max) * (Vin (max) − Vout ) + I GND *Vin (max) (5.3)
IGND wird aus einem Diagram [D3, S.9] bestimmt, dieses ist jedoch nur bis
Eingangsspannungen von 10V gültig, so dass IGND für 17,3V auf etwa 1mA
abgeschätzt werden musste. Somit ergibt sich den mit 45mA am stärksten belasteten
Analog 5V Regler nach (5.4) eine Verlustleistung von 566,2mW.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-27-320.jpg)
![5 Bauteilauswahl 28
Pv = 45mA * (17,2V − 5V ) + 1mA *17,2V = 566,2mW (5.4)
Das Datenblatt gibt eine maximale Sperrschichttemperatur von 125°C an, die laut
Datenblatt nach (5.5)(5.6) näherungsweise berechnet werden kann.
TJ = Pv * Rth (5.5)
°C
TJ = 566,2mW *150 = 84,9°C (5.6)
W
Die maximale Sperrschichttemperatur berechnet sich aus der durch die Verlustleistung
erzeugten Temperatur + Umgebungstemperatur.
TJ max = Tv + TUmgebung (5.7)
Somit ergibt sich nach (5.8) eine maximale Umgebungstemperatur von 40,1°C, über
der die Imu nicht mit der maximalen Eingangsspannung betrieben werden darf.
TUmgebung = TJ max − Tv = 125°C − 84,9°C = 40,1°C (5.8)
Als Regler für die digitalen Spannungen sind keine besonders rauscharmen Regler
notwendig, jedoch ergab sich hier wiederum das Problem, dass die im Handel
verfügbaren Regler entsprechender Baugröße keine ausreichende Spannungsfestigkeit
besaßen bzw. teurer waren als die LT1761. Daher wurden für die digitalen
Versorgungen ebenfalls die gleichen Regler verwendet.
Die Stromaufnahme der MCU wird hauptsächlich durch die angeschlossene Peripherie
in Form von Servos, Kamera, Funkmodul und ähnlichem bestimmt. Die Stromaufnahme
der Servos wurde mit etwa 2A angenommen, somit wurde für den digitalen 5V Zweig
der MCU das fertige Schaltreglermodul PTH08080 [D15] verwendet, welches einen
maximalen Ausgangsstrom von 2A liefern kann. Mit einer maximalen](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-28-320.jpg)
![6 Blockschaltbild 29
Eingangsspannung in Höhe von 18V ist er noch mit vier Lithium-Polymer-Zellen
verwendbar. Die digitale 3,3V Versorgung kann zur Reduzierung der Verlustleistung
per LDO aus den 5V gewonnen werden. Die nötige Belastbarkeit wird hauptsächlich
von Mikrocontroller sowie angeschlossener Peripherie bestimmt. Um genügend
Reserven für Peripheriebaugruppen zu besitzen wurde die 3,3V Versorgung großzügig
dimensioniert und mit einem LM1117-3,3 [D28] ausgestattet, der in der Lage ist bis zu
800mA zu liefern. Um das Funkmodul vor Störungen andere Baugruppen zu schützen
wurde es mit einem eigenen Spannungsregler, ebenfalls vom Typ LM1117-3,3
ausgestattet. Durch die großzügige Dimensionierung können die anderen Bauteile in der
Auslegung unberücksichtigt bleiben, da sie nur einen geringen Strombedarf besitzen.
Die beiden analogen Versorgungsspannungen dienen nur zu Versorgung der
Mikrokontroller internen ADC sowie eventueller Peripherie, woraus nur ein geringer
Strombedarf in Höhe einiger mA resultiert. Es wurden daher die gleichen Regler wie
auf der IMU eingesetzt, da diese mit 100mA Belastbarkeit bereits die kleinsten
lieferbaren Regler waren.
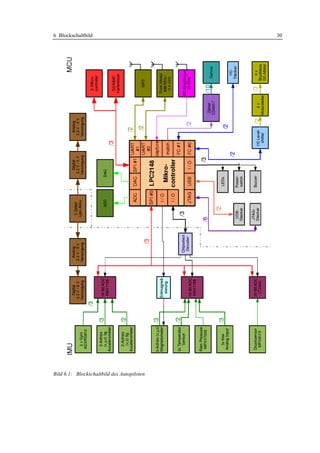
6 Blockschaltbild
Bild 6.1 zeigt das Blockschaltbild des Autopiloten mit seinen wichtigsten
Komponenten. Auf der Seite links der grauen Strichpunktlinie sind die Komponenten
der IMU, wie Sensoren und Analog-Digital-Umsetzer dargestellt.
Rechts der grauen Strichpunktlinie befinden sich die Komponenten der MCU. Den Kern
bildet hier der Mikroprozessor, umgeben von den Peripheriebausteinen.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-29-320.jpg)
![7 Schaltungsentwurf 31
7 Schaltungsentwurf
Das Kapitel Schaltungsentwurf befasst sich mit der äußeren Beschaltung der Bausteine,
der Dimensionierung der Peripheriebausteine, sowie der Verschaltung der Bauteile
untereinander.
Die Schaltpläne sind im Anhang im Kapitel 21.3 aufgeführt.
7.1 Mikrocontroller
Der Mikrocontroller LPC2148 [D7] befindet sich in einer Standardschaltung. Alle
Versorgungsanschlüsse sind mit 100nF gegen Masse abgeblockt. Die Takterzeugung
erfolgt mittels einem 12MHz Quarz und den beiden zugehörigen 22pF Kondensatoren.
Die Erzeugung des Resetimpuls beim Einschalten wird über ein RC Glied bestehend
aus 10kΩ gegen 3,3V und 100nF gegen Masse erzeugt. Der Anschluss des USB Ports
erfolgte nach Angabe im Datenblatt (Seit 32 Fig. 10) mit den üblichen 33Ω
Serienwiderständen in den Signalleitungen sowie 18pF Kondensatoren von den
Signalleitungen gegen Masse. Die Connectschaltung wurde mit einem Transistor
durchgeführt dessen Typ aus den Paparazzi Entwürfen übernommen wurde. Die 5V des
USB Bus werden nicht direkt an den VBUS Pin des Controllers gelegt sondern zunächst
über einen Spannungsteiler auf 3,3V begrenzt.
7.2 Gyroskope
Die drei Gyroskope des Typs ADXRS610 sind nach den Herstellerangaben im
Datenblatt [D4] beschaltet.
Die Bauteile der die Gyroskope sind jeweils gleich nummeriert, jedoch unterscheidet
sich die erste Ziffer zur Unterscheidung der Achsen. Bauteile beginnend mit 5
bezeichnen die X-Achse, beginnend mit 6 die Y-Achse und beginnend mit 7 die Z-
Achse. Beschrieben wird hier nur die X-Achse.
Die analoge 5V und digitale 5V Spannungsversorgung für die Gyroskope sind getrennt
ausgeführt und am Baustein mit je 100nF / 10V abgeblockt (C505 und C506). Um die
für die Piezoresonatoren erforderliche Spannung von ca. 15V zu erzeugen, besitzen die
Gyroskope interne Ladungspumpen, die aus der 5V Versorgungsspannung ca. 15V
erzeugen. Die Ladungspumpen benötigen hierzu externe Kondensatoren, die im
Datenblatt mit 22nF angegeben sind (C502 und C503). Da die Kondensatoren mit den
erzeugten 15V belastet werden wurden hier Kondensatoren der Bauform 0603
verwendet, die eine Spannungsfestigkeit von 50V aufweisen. In Baugröße 0402 wären
maximal 16V möglich, und somit keinerlei Sicherheitsreserve, was auf Dauer zum
Ausfall der Kondensatoren führen könnte. Gleiches gilt für den Filterkondensator der
Ladungspumpen C501, er ist im Datenblatt mit 100nF angeben und in Bauform 0603
bei 50V Spannungsfestigkeit vorgesehen.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-31-320.jpg)
![7 Schaltungsentwurf 32
Aus R501 und R502 ist ein Spannungsteiler aufgebaut, um eventuell die
Ausgangsspannung der Gyroskope an den Analog-Digital-Umsetzer anzupassen. Im
Normalbetrieb werden die Gyroskope vom ADC mit der Vratio Spannung in Form der
Referenzspannung des ADC versorgt, so dass eine optimale Anpassung zwischen
Gyroskopen und ADC erfolgt. In diesem Fall ist R501 mit 0Ω zu bestücken und R502
ist unbestückt zu lassen. Sollte die Vratio Spannung jedoch nicht durch den ADC,
sondern durch die Versorgungsspannung geliefert werden, ist eine Pegelanpassung
durch den Spannungsteiler notwendig.
R503 dient zum Abtrennen der Vratio Spannung. Dies ist nötig wenn Sensoren des Typs
ADXRS150 bzw. ADXRS300 bestückt werden sollten (s.u.).
Über C507 kann die maximale Bandbreite der Gyroskope eingestellt werden. Neben
C507 wird sie durch einen internen Widerstand mit 180kΩ bestimmt. Die Berechung
der Bandbreite erfolgt durch Formel (7.1), die auch im Datenblatt [D4, S.9] aufgeführt
ist. Als Standardwert sind für C507 2,2nF vorgesehen, was eine Bandbreite von ca.
400Hz ergibt. Mit diesem Wert wurden bisher gute Erfahrungen gemacht. Sollten
jedoch zukünftig Probleme auftreten oder Änderungen gewünscht sein, zeigt Tabelle
7.1 geläufige Bandbreitenwerte für C507.
1
f out = (7.1)
2 * π * Rout * C 507
Tabelle 7.1: Geläufige Werte für C507
Wert C507 nach Resultierende
Bandbreite (Hz) Wert C507 (nF)
Reihe (nF) Bandbreite (Hz)
50 17,684 18 49,122
100 8,842 8,2 107,829
200 4,421 4,7 188,127
400 2,210 2,2 401,907
800 1,105 1,0 884,195
Durch die Lötjumper SJ501 und SJ502 können die Gyroskope in den Selbsttestmodus
versetzt werden, indem diese geschlossen werden. Die Konfiguration und die zu
erwartenden Ausgangsspannungswerte (in Ruhelage) sind in Tabelle 7.2 dargestellt. Die
Widerstände R504 und R505 sind Pulldownwiderstände um bei geöffneten Lötjumpern
einen Nullpegel zu garantieren.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-32-320.jpg)
![7 Schaltungsentwurf 33
Tabelle 7.2: Selbsttestmodi
SJ501 SJ502 RateOut (Ruhelage)
Normalbetrieb geöffnet geöffnet 0V
Test System 1 geöffnet geschlossen -0,5V
Test System 2 geschlossen geöffnet +0,5V
Test System 1&2 geschlossen geschlossen 0V
Das Design der Schaltung ist auf Gyroskope der ADXRS61X Serie optimiert. Diese
Serie beinhaltet baugleiche und pinkompatible Sensoren mit unterschiedlicher
Auflösung. Die verschiedenen erhältlichen Typen mit den Drehraten zeigt Tabelle 7.3.
Tabelle 7.3: Erhältliche Gyroskope
Gyroskop Maximale Drehrate
ADXRS610 ±300°
/s
ADXRS612 ±250°
/s
ADXRS613 ±150°
/s
ADXRS614 ±50°
/s
Es ist jedoch auch möglich die älteren Sensoren vom Typ ADXRS150 [D18] bzw.
ADXRS300 [D19] zu bestücken. Hierbei sind jedoch kleine Anpassungen im Vergleich
zur Originalbestückung durchzuführen.
• C501 ist anstatt mit 100nF mit 47nF zu bestücken
• R503 darf nicht bestückt werden, da der ADXRS150 bzw. ADXRS300 eine
eigenen Referenzspannung erzeugt, die nicht in die Schaltung eingespeist
werden darf. Eine Bestückung von R503 kann Schäden am Gyroskop oder am
ADC zur Folge haben.
• Die Ausgangsspannung ist über den Spannungsteiler an den ADC anzupassen.
Im Vorlauf des Schaltungsdesigns um die ADXRS610 stellte sich die Frage ob die
Schaltkreise an dem Vratio Pin eine Spannung erwarten oder eine bereit stellen. Die
Erklärung zum Vratio Prinzip ist im Datenblatt recht kurz gehalten. Aus dem Text muss
man die Annahme ziehen, dass es sich um einen Eingang handelt, an dem der
Schaltkreis eine Spannung erwartet, während in einem Übersichtsschaltplan der Vratio
Pin als Ausgang gekennzeichnet ist.
Um kein Risiko einer nicht funktionstüchtigen Leiterplatte einzugehen wurde daher ein
Testaufbau hergestellt (Bild 7.1). Der ADXRS610 wurde dazu umgekehrt auf eine
Lochrasterplatine geklebt und die Anschlüsse über dünnen Kupferdraht auf die
Lochrasterplatine geführt, wo die Montage der restlichen Bauteile erfolgte.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-33-320.jpg)
![7 Schaltungsentwurf 34
Die erste Inbetriebnahme erfolgte ohne eine Spannungsquelle an Vratio. Eine Messung
der Spannung an Vratio ergab 0V, ebenso war das Drehraten- und das Temperatursignal
bei 0V. Daher wurde nun eine Spannung an Vratio angelegt. Hiernach war an dem
Drehratensignal die Hälfte der Betriebsspannung zu messen, wobei sich das Signal bei
Dreheinwirkung veränderte. Ebenso lag ein Temperatursignal vor, welches sich bei
Erwärmen des Sensors auch änderte.
Es konnte somit einwandfrei nachgewiesen werden, dass an dem Vratio Pin die
Referenzspannung des ADC anzulegen ist.
Bild 7.1: Versuchsaufbau für Gyroskop ADXRS610
7.3 Beschleunigungssensoren
Die IMU besitzt 2 Beschleunigungssensoren, die auf unterschiedliche Art und Weise
genutzt werden können.
In der Vollausstattung befindet sich auf der Hauptplatine ein 3-achsiger ADXL330
[D22] mit ±3g Messbereich und auf der senkrechten Y-Platine ein 2-Achsiger
ADXL320 [D23] mit ±5g Messbereich. Als weiterer verwendbarer Sensor ist der
ADXL323 [D24] mit 2 Achsen und einem Messbereich von ±5g erhältlich.
Je nach Anwenderwunsch können die Beschleunigungssensoren unterschiedlich
bestückt werden um unterschiedliche Messbereiche zu erhalten. Als einfachste Variante](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-34-320.jpg)

![7 Schaltungsentwurf 36
7.4 Kompass
Die Schaltung für den Kompass ist einem Vorschlag des Applikationsberichtes
AN00022 [D12] von Philips Semiconductors angelehnt. Die Dimensionierung der
analogen Auswertelektronik wurde von dem MK3Mag Modul [8] übernommen, ebenso
wie das Hinzufügen der Kondensatorkette zur Erzeugung des Flip Impulses.
7.5 Luftdruck
Die Dimensionierung der Abblockkondensatoren des MPXH6115 ist aus dem
Datenblatt [D25] entnommen. Der Ausgang des Sensors ist mit einer Kombination von
2 Widerständen und einem Kondensator versehen, die es ermöglichen sowohl Sensoren
mit Strom- als auch mit Spannungsausgang zu nutzen. Für den Fall der Nutzung von
Sensoren mit Spannungsausgang ist R301 unbestückt zu lassen, R302 und C303 werden
nach Schaltplan bestückt. Für die Nutzung von Sensoren mit Stromausgang wird R301
nach Schaltplan bestückt, R302 mit 0Ω und C302 mit 47pF, dies entspricht der Angabe
im Datenblatt.
Der nachfolgende Impedanzwandler ist auf Empfehlung der AN1646 [D5] zu
Rauschreduzierung nachgeschaltet. Entgegen der Angabe im Datenblatt wird hier kein
MC33502, der nicht lieferbar ist, verwendet, sondern ein vergleichbarer Rail-to-Rail
Operationsverstärker TLC2262. Der Ausgang des Impedanzwandlers ist über einen
Spannungsteiler zur Pegelanpassung an den Eingang des 24-Bit ADC gelegt. Der
Spannungsteiler kann je nach Bedürfnis noch nachträglich angepasst werden. In der
vorgesehenen Version ist er mit je 3,3kΩ bestückt, was zur Folge hat, dass die
Ausgangsspannung des Impedanzwandlers halbiert wird, begründet dadurch, dass der
ADC einen Eingangsspannungsbereich von VREF/2 besitzt. Bei einer
Referenzspannung von 5V bedeutet dies, das Spannungen im Bereich von –2,5V - +
2,5V verarbeitet werden können. Spannungen über 2,5V liefern einen
Maximalausschlag. Die Ausgangsspannung des Luftdrucksensors beträgt maximal ca.
4,8V, die vom Impedanzwandler nicht verändert werden. Durch den Spannungsteiler
ergibt sich somit eine Spannung von etwa 2,4V am Eingang, was noch eine gewisse
Reserve zum maximalen Messbereich darstellt um so Überschreitungen des
Messbereichs durch etwaige Toleranzen zu vermeiden.
Die Beschaltung der Versorgungsspannung des LTC2440 mit Kondensatoren erfolgt
nach Datenblattempfehlung. Die Referenzspannung wird durch die analoge 5V
Versorgungsspannung gebildet, ist jedoch durch eine zusätzliche Induktivität von 10µH
und einen 100nF, zur Vermeidung von Störungen, entkoppelt.
In den sendenden I/O Leitungen des SPI Bus des LTC sind Spannungsteiler integriert
um den 5V Pegel des LTC2440 auf die 3,3V Pegel des LPC2148 herabzusetzen. Zwar
wird beim LPC2148 angegeben, das seine Eingänge 5V tolerant sind, jedoch hat es
dabei in der Vergangenheit bereits einige Probleme mit Zerstörung von I/O Pins
gegeben. Die Spannungsteiler sind daher als Sicherheitsmassnahme integriert worden.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-36-320.jpg)
![7 Schaltungsentwurf 37
Umgekehrt erkennt jedoch der LTC2440 die 3,3V Pegel des LPC2148 eindeutig als
High Pegel, so dass hier keine weiteren Maßnahmen erforderlich sind.
7.6 Staudruck
Der Differenzdrucksensor MPXV7002 [D26] verfügt über einen Messbereich von ±
20mbar bei einer Aussteuerung von 0,5V – 4,5V. Ohne einen Druckunterschied beträgt
die Ausgangsspannung 2,5V. Für die Staudruckmessung wird nur der positive
Messbereich, also von 2,5V – 4V verwendet. Durch den zu großen Messbereich des
Sensors werden bei einem erwarteten maximalen Druckunterschied von 2,58mbar nur
effektiv ca. 12,9% des Messbereichs genutzt, was einer Ausgangsspannung von 258mV
entspricht. Um den Bereich des ADC besser ausnutzen zu können muss die geringe
Ausgangsspannung verstärkt werden, wobei sich das Problem ergibt, dass der Nullpunkt
bei 2,5V liegt und so diese 2,5V immer mitverstärkt wurden. Aus diesem Grund wurde
die virtuelle Masse des nachfolgenden nicht invertierenden Verstärkers, in Form des
TLC2262, durch R309 und R311 auf 2,5V angehoben. Der Verstärker selbst sollte die
258mV auf ca. 3,8V verstärken. Die maximale Aussteuerung des ADC wird zwar erst
bei 4,096V erreicht, jedoch sind diverse Toleranzen zu berücksichtigen, so dass eine
Reserve eingeplant wurde um ein Übersteuern zu vermeiden. Für eine Verstärkung von
0,2V auf 3,8V ist eine Verstärkung von 14,7 notwendig woraus sich aus der
umgestellten Gleichung (7.3) zur Verstärkungsberechnung für nicht invertierende
Operationsverstärker ein Widerstandswert für R312 von 301,4kΩ ergibt. Der
nächstliegende Wert einer Reihe beträgt 300kΩ. Der Wert für R311 wurde bereit im
Zuge der Massehochlegung auf 22kΩ festgelegt.
R312 = (v − 1) * R311 = (14,7 − 1) * 22kΩ = 301,4kΩ (7.3)
Der sich am Ausgang befindliche Spannungsteiler ist für individuelle Anpassung
vorgesehen, wird in der Standardversion jedoch nicht gebraucht. Daher ist R313 mit 0Ω
zu bestücken und R314 ist unbestückt zu lassen.
7.7 Temperatur
Die Beschaltung des Temperatursensors MAX6605 (IC351) entspricht der im
Datenblatt [D6] empfohlenen.
Durch R351 ist es möglich den Temperatursensor vom ADC zu trennen, falls der
Sensor nicht benötigt oder der ADC Kanal anderweitig benötigt wird.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-37-320.jpg)
![7 Schaltungsentwurf 38
7.8 Analog – Digital – Umsetzer
Die IMU verwendet zwei Analog Digital Umsetzer MAX1168 [D14] von Maxim zur
Digitalisierung der Sensordaten. Die Aufteilung der Sensoren auf beide ADC erfolgte
so, dass der erste ADC alle schnellen Signale, also die der Gyroskope und der
Beschleunigungssensoren verarbeitet und der zweite die langsameren Daten vom
Magnetsensor, Staudruck sowie Temperatur verarbeit.
Die ADC lassen sich in zwei verschieden Moden betreiben, wofür einer speziell für den
Einsatz zusammen mit einem DSP konzipiert ist, während der andere den normalen
Betrieb per SPI Schnittstelle darstellt. Durch die Widerstände R401 und R402 bzw.
R411 und R412 sind die ADC für den Betrieb mit der SPI Schnittstelle konfiguriert.
Die Beschaltung mit Kondensatoren erfolgte nach Datenblattempfehlungen [D14].
Bei ADC0 besteht die Besonderheit, das seine internen Referenzspannung über den 0Ω
Widerstand R403 zu den Gyroskopen geleitet wird, welche wiederum diese als Vratio
Spannung nutzen um ihren Messbereich auf diese Spannung anzugleichen.
7.9 Spannungsversorgung
7.9.1 LT1761
Alle in dem Projekt verwendeten LT1761 sind nach den Datenblattangaben [D3]
beschaltet. Der 2,2µF Eingangstantalkondensator ist aufgrund der hohen möglichen
Eingangsspannung als 25V Typ festgelegt. Der 10µF Ausgangstantalkondensator ist bei
der 3,3V Ausgangsspannungen als 6,3V Typ ausgelegt, bei den 5V Spannungen als 10V
Typ. Die analogen Regler sind am Eingang zusätzlich mit einer 0,47µH Induktivität
versehen.
7.9.2 LM1117
Beide sich im Projekt befindlichen LM1117 wurden in gleicher Art nach
Datenblattangaben [D28] beschaltet, dies sieht einen 10µF/10V Tantalkondensator am
Eingang vor, wenn sich der Schaltkreis in großer Entfernung zum
Ladeelektrolytkondensator befindet. Da kein Ladeelektrolytkondensator vorhanden ist,
ist dieser Kondensator somit vorzusehen. Weiter empfiehlt das Datenblatt einen 22µF
Tantalkondensator am Ausgang. Zusätzlich wurde dem Ausgangskondensator noch ein
keramischer 100nF Kondensator parallel geschaltet um hochfrequente Störspitzen zu
unterdrücken.
7.9.3 PTH08080
Die Beschaltung des PTH08080 erfolgte nach Datenblattempfehlungen [D15]. Dieses
sieht für den Eingang einen 100µF Kondensator vor, welcher einen niedrigen ESR
aufweist. Dies wurde in der Auswahl des Kondensator berücksichtigt. Die](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-38-320.jpg)
![7 Schaltungsentwurf 39
Spannungsfestigkeit wurde mit 25V hoch gewählt, was jedoch aufgrund der hohen
möglichen Eingangsspannung mit zusätzlicher Reserve als sinnvoll erschien. Als Typ
wurde hier ein Aluminiumelektrolytkondensator verwendet, da laut Datenblatt bei
Tantalkondensatoren die Spannungsfestigkeit mindestens das Doppelte der zu
erwartenden Gleichspannungsbelastung betragen muss, was zu einem erheblich mehr an
Platzbedarf (mehrere Kondensatoren nötig) und zu deutlich höheren Kosten geführt
hätte. Bei Aluminiumelektrolytkondensatoren trifft dieser Fall nicht zu.
Als Ausgangskondensator wurde ein Tantalkondensator mit 150µF verwendet. Zwar
benötigt der PTH08080 nicht zwingend einen Ausgangskondensator, jedoch lässt sich
hiermit die durch den Schaltregler verursachte Restwelligkeit mindern.
7.10 Chipselect Decoder
Die Chipselectschaltung besteht aus zwei 74HC138, wovon jeweils einer auf der IMU
und einer auf der MCU bestückt ist. Die Versorgungsspannung ist nah am Schaltkreis
durch 100nF abgeblockt. Die Versorgung erfolgt mit 3,3V, somit besitzen alle
Chipselectsignale ebenso 3,3V Pegel. Die Eingangssignale vom Controller sind mit
4,7kΩ versehen um sofort nach dem Einschalten einen High Pegel zu erhalten falls der
Controller zu diesem Zeitpunk noch undefinierte Signale ausgibt.
Auf der IMU selektieren die ersten 3 Ausgänge die 3 ADC. Auf der MCU befindet sich
kein SPI Gerät, daher sind alles Chip Select Signale über SPI1-A (X117) herausgeführt.
Die bereits auf der IMU vergebenen Signale wurden auf Lötkontakte herausgeführt.
7.11 Leistungsschalter / Kameraschalter
Der Leistungsschalter TPS2015 für die Kamera ist nach Datenblattangaben [D29]
beschaltet, dieses sieht einen 100nF Kondensator am Eingang wie auch am Ausgang
vor. Zusätzlich ist am Ausgang ein 22µF Kondensator nahe der Last vorzusehen.
Der Überstromsignalausgang bleibt unausgewertet, die Steuerung erfolgt durch den
Mikrocontroller über den Enable-Anschluss.
7.12 I²C Levelshifter
Der I²C Levelshifter PCA9306 wurde nach Datenblattangaben [D30] beschaltet. Jedoch
wurden nicht die im Datenblatt empfohlenen Widerstandswerte für die Pullup-
Widerstände der Busleitungen verwendet, da es mit diesen Werten zu Fehlfunktionen
auf dem Bus kam. Die Pullup-Widerstände wurden daher mit 3,3kΩ bestückt, mit
welchen eine Versuchsschaltung, bei der die Widerstände aufgrund eines Listenfehlers
eigentlich falsch bestückt waren, bereits einwandfrei funktionierte.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-39-320.jpg)









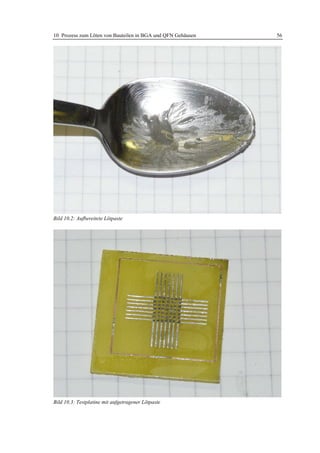
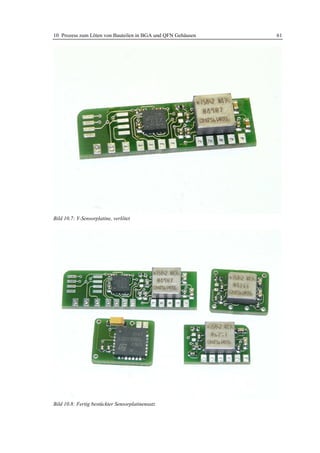
![10 Prozess zum Löten von Bauteilen in BGA und QFN Gehäusen 50
Bild 9.2: Pappmodell mit beiden einzelnen Teilen
10 Prozess zum Löten von Bauteilen in BGA und QFN
Gehäusen
10.1 Bestehendes
Zum Löten der BGA und QFN Gehäuse ist es erforderlich einen Reflowlötprozess zu
benutzen. Hierzu stand aus einem früheren Projekt ein Pizzaofen mit externer Steuerung
durch eine Schaltung der Zeitschrift Elektor [11] zur Verfügung.
Der Ofen wurde von mir im Rahmen einer Aushilfstätigkeit nach dem Entwurf der
Elektor aufgebaut und in Betrieb genommen. Eine genaue Einstellung sowie Ermittlung
eines optimalen Temperaturverlaufs erfolgte jedoch noch nicht.
Ein Reflowprozess beinhaltet einen bestimmten Temperaturverlauf, der von der
Reflowanlage möglichst gut realisiert werden sollte. Als Anhaltswerte sind in manchen
Datenblättern von Bauteilen Reflowtemperaturverläufe vorgegeben.
Ein Reflowtemperaturverlauf gliedert sich in folgende Phasen:](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-50-320.jpg)













![12 Zusatzmodule 67
12 Zusatzmodule
12.1 Motorsteller
Bei den zu verwendeten Motorstellern handelt es sich um die Bruchlescontroller von
Holger Buss und Ingo Busker in der Version 1.2 [12].
Die Bestückung erfolgte nach Anleitung des Herstellers ohne besondere
Vorkommnisse.
Nach Beendigung der Bestückung wurden die Motorsteller nach Anleitung des
Herstellers mit der Motortestsoftware programmiert und anschließend in Betrieb
genommen. Es zeigte sich hier bei allen vier Stellern einwandfreie Funktion, so dass im
Anschluss die Betriebsfirmware in der Version 0.41 einprogrammiert wurde.
Nach Anlöten der Kabel für Betriebsspannung und Motorphasen wurden die Platinen in
Schrumpfschlauch eingeschrumpft und montiert.
Bild 12.1: Bereits eingeschrumpfter und am Quadrokopter montierter Motorsteller
12.2 Das GPS-Modul
Für den aufzubauenden Quadrokopter sollte ein uBlox GPS Module vom Typ SAM-LS
verwendet werden. Bei dem Modul handelt es sich um eine Ausführung, die normal für
den Anschluss einen Folienkabels vorgesehen ist. Anstatt über Folienkabel ist jedoch
auch ein Anschluss über Adapterplatinen auf eine Trägerplatinen möglich (Bild 12.3).
Dieses Modul wurde bereits in einem früheren Projekt verwendet, so dass die in diesem
Projekt verwendete Adapterplatine lediglich auf neue Erkenntnisse abgewandelt wurde.
Hierzu gehört der Austausch der Lithiumbatterie, die nur eine geringen Lebensdauer
aufwies, gegen einen Gold Cap Kondensator mit zugehöriger Ladeschaltung (Bild 3.1).](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-67-320.jpg)









![15 Softwareanpassung 77
Zu beachten ist, dass die Werte der internen ADC noch in die ursprüngliches Arrays
geschrieben werden, welche für das Tiny gebildet wurden. Verwendet werden diese
Werte jedoch im jetzigen Zustand nicht. Für eine Verwendung der internen ADC ist es
daher angebracht, die Arrays auf die neuen Gegebenheiten anzupassen.
15.3 SPI Treiber
Alle Sensoren sind durch insgesamt drei Analog-Digital-Umsetzer über den SPI Bus mit
dem Mikrocontroller verbunden. Die ADC’s müssen entsprechend ihrer Anforderungen
vom Mikrocontroller angesprochen und ausgelesen werden.
Um Rechenzeit einzusparen erfolgt die Steuerung des SPI Bus über einen
Hardwareinterrupt. Die standardmäßigen Routinen zum Senden und Empfangen von
Daten über den SPI Bus warten mittels einer while-Schleife bis die Datenübertragung
auf dem Bus abgeschlossen ist. Die Zeit, in der auf den Abschluss der Datenübertragung
gewartet wird, steht dabei nicht für andere Aufgaben zur Verfügung. Da Rechenzeit
nicht im Überfluss vorhanden ist und das Auslesen der ADC’s über den SPI Bus zeitlich
sehr oft geschieht, ist die Interrupt-Steuerung zwingend erforderlich.
Der die Kommunikation des SPI Bus durchführende Algorithmus setzt sich aus zwei
Zustandsautomaten zusammen, wobei der erste als Interruptservice-Routine aufgerufen
wird und das Lesen und Schreiben auf dem Bus kontrolliert. Der zweite
Zustandsautomat wird vom ersten aufgerufen und teilt dem ersten mit was gelesen und
geschrieben werden soll.
15.3.1 Die Funktion „spi_init“
Die Funktion spi_init übernimmt die Initalisierung der SPI Schnitstelle und setzt alle
Einstellungen. Sie wird in main.c im Initalisierungsbereich aufgerufen
Der Reihe nach werden in dieser Funktion die Pinkonfigurationen, die Einstellungen der
SPI Schnittstelle, sowie die Einstellungen für den Interrupt vorgenommen.
Konfiguration der ChipSelect Pins als Ausgänge [D8, S.84 Tab.68]
IO1DIR |= (1<<21)|(1<<22)|(1<<23); //CS pins as output
Konfiguration des Ausgang zur Ansteuerung der Entmagnetisierspulen als GPIO und
als Ausgang [D8, S.76 Tab.67].
//PIN for MAG_FLIP as GPIO / Direction = Output
PINSEL0 &= ~((1<<14)|(1<<15));](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-77-320.jpg)
![15 Softwareanpassung 78
IO0DIR |= (1<<7);
Konfiguration der Pins für SPI0 als SPI [D8, S.76 Tab.60].
//Pins for SPI0
PINSEL0 |= (1<<8)|(1<<10)|(1<<12);
PINSEL0 &= ~((1<<9)|(1<<11)|(1<<13));
Konfiguration der SPI0 Taktgeschwindigkeit im S0SPCR Register. Begrenzend wirkt
sich hierbei die Spezifikation des MAX1168, der eine maximale SPI Frequenz von
4,8MHz erlaubt. Die Berechnung erfolgt durch einen festzulegenden Teiler aus dem
Kerntakt des Mikrocontrollers, der in diesem Fall auf 60MHz eingestellt ist. Für die
maximal erlaubte SPI Frequenz von 4,8MHz wäre ein Teiler von 12,5 erforderlich.
Nach [D8, S.178 Kap.12.4.4] muss der Teiler gleich oder größer 8, sowie eine ganze
und gerade Zahl sein. Der nächste mögliche Teiler ist somit 14, was einer SPI Frequenz
von 4,28MHz entspricht.
Der LTC2440 könnte mit einer maximalen Frequenz von 20MHz ausgelesen werden,
jedoch würde dies keinen Geschwindigkeitsvorteil bringen, das der LTC2440 im
Vergleich zu den beiden MAX1168 nur selten gelesen wird und eine individuelle
Umkonfiguration des SPI Bus mehr Zeit kosten würde als es bringen würde. Die
Einstellung des SPI Takts ist daher für alle drei Bausteine einheitlich eingestellt.
S0SPCCR = 0x000E; //SPI SCK divider (60MHz/14=4,28MHz)
Das S0SPCR Register enthält die grundlegende Konfiguration der SPI Schnittstelle [D8,
S.176f Tab.156]. Bit 0 und 1 sind reserviert und werden nicht behandelt.
Bit 2 legt die Anzahl der pro senden/empfangen übertragenen Bits fest. Eine 0 legt die
Anzahl fest auf 8 Bit, eine 1 ermöglicht die Einstellung der Anzahl über die Bits 11:8.
Da der MAX1168 seine Antwort in 16Bit schickt und der LTC2440 24 32Bit benötigt
soll die Übertragung in 16Bit Blöcken erfolgen um nicht zu viele kleine Datenblöcke
übertragen zu müssen. Somit ist Bit 2 auf 1 zu setzen und die Größe von 16Bit über die
Bits 11:8 einstellen.
Bit 3 und 4 legen die Phase und die Polarität des SPI Bus fest, wobei die Phase
beschreibt, ob die Daten bei der ersten Flanke (fallenden) (CPHA=0) oder bei der
zweiten (steigend) (CPHA=1) übernommen werden sollen. Die Polarität legt fest, ob der
SPI Takt im Ruhezustand low (CPOL=0) oder high (CPOL=1) sein soll. Die
Einstellung von CPHA und CPOL richtet sich nach dem angesprochenen Baustein und
kann durchaus von Baustein zu Baustein variieren. Der MAX1168 erfordert nach P26
CH „Serial Interfaces“ die Einstellung für CPHA=CPOL=0. Die nötige Konfiguration](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-78-320.jpg)
![15 Softwareanpassung 79
für den LTC 2440 ist aus seinem Datenblatt [D2, S.11 Fig.3] zu entnehmen. Aus dem
Timingdiagramm ist zu erkennen, dass der LTC2440 ebenso die Einstellung
CPHA=CPOL=0 benötigt. Somit kann die Einstellung von CPHA und CPOL in der init
Routine erfolgen und muss nicht individuell für jeden Baustein eingestellt werden.
Bit 5 legt fest ob der SPI0 Port im Slave- (=0) oder im Mastermode (=1) betrieben
werden soll. Für den benötigten Mastermode ist somit Bit 5 auf 1 zu setzen.
Bit 6 legt fest ob zuerst das MSB (=0) oder das LSB (=1) übertragen werden soll. Bei
dem MAX1168 ist in [D14, S.18 Abb.11] und bei dem LTC2440 [D2, S.11 Fig.3] zu
erkennen, dass das MSB zuerst übertragen werden muss. Bit 5 ist somit 0 zu setzen.
Bit 7 aktiviert (=1) oder inaktiviert (=0) einen Interrupt bei Ende der Datenübertragung.
Da ein Interrupt gewünscht ist, ist Bit 7 auf 1 zu setzen.
Bit 8-11 legen die Anzahl der zu übertragenden Bits fest. Aktivierung erfolgte über Bit
2. Für den gewünschten 16Bit Transfer sind Bit 8-11 auf 0 zu setzen.
Zur Erhöhung der Geschwindigkeit werden die Bits zunächst in eine Variable
geschrieben und am Ende in das Register übertragen.
unsigned short int s0spcr_var = S0SPCR;
// DataSizeSelBit, MasterMode. IRQ On
s0spcr_var |= (1<<2)|(1<<5)|(1<<7);
// CPHA=0, CPOL=0, MSB
s0spcr_var &= ~((1<<3)|(1<<4)|(1<<6)|
// 16BitDataSize
((1<<8)|(1<<9)|(1<<10)|(1<<11)) );
S0SPCR = s0spcr_var;
Für die Konfiguration des Interupts ist es nötig die Funktion anzugeben, welche im
Falle des Interrupts aufgerufen werden soll (VIC_ADDR_SPI0).
Des weiteren ist es nötig in VIC_CTRL_SPI0 den Interruptvektor zu aktivieren und den
gewünschten Slot zuzuweisen. Der Slot ist Hardwaretechnisch festgelegt und ist in
diesem Fall 10. Über ein Define ist ihm die Bezeichnung VIC_Slot_SPI0 zugewiesen.
Über VICIntEnable wird der Interrupt selbst aktiviert.
//set interrupt vector
VIC_ADDR_SPI0 = (unsigned long) spi_int;
// use it for SPI0 interrupt
VIC_CTRL_SPI0 = VICVectCntl_ENABLE | VIC_Slot_SPI0;](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-79-320.jpg)



![15 Softwareanpassung 83
if ( (ltc_tmp & (1<<31)) == 1 ) {
// set error
imu_value = 0;
} else {
//ignore first 4 Bits, !!! sign Bit canceled !!!
// shift 5 pos. right make Bit 5 to LSB
imu_value = ((ltc_tmp & 0x0FFFFFFF) >> 5);
}
}
else {
//mode 16 read data
imu_value = S0SPDR;
}
Ebenfalls in Zustand 2 erfolgt die Berechnung von Mittelwerten. Hierzu werden eine
bestimmte Zahl von Messwerten addiert und später durch die Anzahl geteilt. Es ergeben
sich stabilere Messwerte im Vergleich zu einzelnen Messwerten. Die Anzahl ist in der
Variabelendeklaration von imu_average_nb[] für jeden Sensor individuell einstellbar.
Nachdem nach der Mittelwertbildung der Zustand wieder auf 0 gesetzt wird, erfolgt
noch die Besonderheit, dass im 32 Bit Mode das neue Kommandowort an den LTC2440
gesendet wird. Dies kann erst nach der Mittelwertbildung geschehen, da die
Mittelwertbildung zeitlich länger dauert als eine Datenübertragung auf dem SPI Bus, es
würde somit einen Konflikt geben, welcher zur Blockade der SPI Kommunikation
führen würde. Nach Übertragung des Dummywords wird die Zustandmaschine und ISR
regulär verlassen.
Im Falle des 16Bit Mode erfolgt jedoch keine neue SPI Kommunikation die einen
Interrupt auslösen würde. Aus diesem Grund muss ohne ein break direkt bei dem
Zustand 0 fortgesetzt werden. Dies ist auch der Grund, das der Zustand 0 unter Zustand
2 angeordnet ist und nicht an oberster Stelle.
// calculate average values
imu_value_sum[stor_lo] += imu_value - imu_offset[stor_lo];
if((imu_count[stor_lo]++) > imu_average_nb[stor_lo]) {
// export value](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-83-320.jpg)
![15 Softwareanpassung 84
imu_average[stor_lo]=imu_value_sum[stor_lo]/imu_count[stor_lo];
// cleanup
imu_count[stor_lo] = 0;
imu_value_sum[stor_lo] = 0;
analogconversion();
}
h_state = 0;
if (mode == 32) {
//mode 32 send cmd word
SpiSend (cmd_word);
break;
}
/* if mode = 16 no break; */
15.3.4 Die Funktion „sm_ctrl“
Die Funktion sm_ctrl stellt die Informationen zur Verfügung, die, die Zustandmaschine,
welche die SPI Schreib- und Lesevorgänge kontrolliert (spi_int), benötigt. Dies
beinhaltet über die Variable cs welcher Baustein über das Chip Select Signal aktiviert
werden soll, über cmd_imu welches Kommandowort gesendet werden muss, über
stor_loc die Position an welcher Position des speichernden Arrays gespeichert werden
soll, sowie über mode_p in welchem Modus (16 oder 32 Bit ) gearbeitet werden muss.
Herzstück der Funktion ist eine Zustandsmaschine mit 20 Zuständen. Jeweils ein
Zustand entspricht einem Sensorwert. Besonderheiten sind jedoch bei den drei
Magnetsensoren und dem Absolutdrucksensor gegeben.
Die Magnetsensoren haben die Eigenschaft sich zu magnetisieren und müssen daher
durch eine integrierte Entmagnetisierspule entmagnetisiert werden. Die Spulen werden
abwechselnd mit einem positiven und negativen Impuls belegt und danach jeweils der
Sensorwert gelesen. Es ergeben sich somit pro Sensor zwei Werte, der erste nach einem
positiven Impulse, ein weiterer nach einem negativen Impuls. Durch eine spätere
Verrechnung dieser beiden Werte lassen sich Offsetfehler beheben. Für alle drei Achsen
ergeben sich somit nicht nur drei Werte, sondern sechs Werte und somit auch Zustände.
Zusätzlich sind Wartezeiten zwischen dem Auslesen einzuhalten, so darf nur alle 2ms
gelesen werden. Das Gleiche trifft auch auf den Absolutdrucksensor zu, der je nach
Einstellung eine bestimmte Zeit zur Konvertierung benötigt und nicht vor Beendigung
der Konvertierung gelesen werden darf.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-84-320.jpg)





![15 Softwareanpassung 90
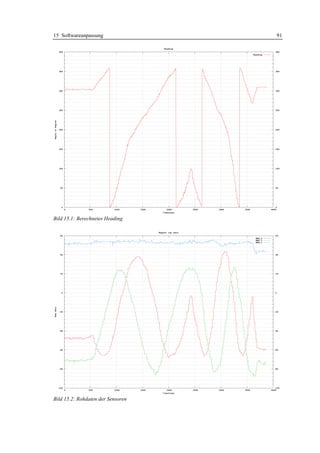
15.4 Magnetometer
Die Einbindung des Magnetometers erfolgte in die Datei mm3.c. Hierbei handelt es sich
um eine vorhandene Routine, welche speziell für den MicroMag3 geschrieben wurde.
Diese Routine musste nun soweit angepasst werden, dass sie mit dem auf den KMZ51
basierenden Magnetometer ebenso ein die Nordposition berechnet (Heading). Als
Ergebnis dieser Berechnung liegt die Ausrichtung als Winkel von 0-359° vor, wobei
sich bei 0° die Nordposition befindet
Die Routine arbeitet ursprünglich so, dass sie den MicoMag3 ausliest und dessen
Rohdaten in ein Struct schreibt. Die Änderung besteht nun darin, nicht die Daten des
MicroMag3 zu verarbeiten, sondern die der KMZ51 Sensoren. Die Daten der KMZ51
liegen im imu_average Array bereit, jedoch existieren pro Sensor zwei Werte. Ein Wert
nach einem positiven Flipimpuls, sowie ein Wert nach einem negativen Flip Impuls.
Durch Subtraktion dieser beiden Werte lassen sich Offsetfehler kompensieren.
Erste Versuche haben jedoch ergeben, dass mit den direkten Werten der KMZ51 kein
korrektes Heading errechnet werden konnte. Eine Analyse der Verarbeitungsroutine
ergab, dass diese nur in bestimmten Wertebereichen arbeitet und daher auf Rohdaten in
einem bestimmten Bereich angewiesen ist. Dieser Bereich ist auf die Rohdaten des
MicroMag3 abgestimmt. Zum Anpassen der Werte der KMZ51 an die des MicroMag3
wurde ein Faktor berechnet mit dem die Werte der KMZ51 geteilt werden. Der
Wertebereich des MicroMag3 liegt etwa bei 40-80, der der KMZ51 bei etwa 14000-
30000. Es hat sich gezeigt, dass der Algorithmus zur Berechnung des Headings mit
einem Faktor von 350 gute Ergebnisse liefert.
Bild 15.1 zeigt das berechnete Heading bei einer hin und zurück geführten 360°
Rotation. Bild 15.2 zeigt die Rohdaten der drei Magnetsensoren aus welchen das
Heading berechnet wird.
#ifdef HBC
// copy values to struct
MM3.x_axis=(imu_average[IMU_MAGXL]-imu_average[IMU_MAGXH])/350;
MM3.y_axis=((-imu_average[IMU_MAGYL])-(-imu_average[IMU_MAGYH]))/350;
MM3.z_axis=(imu_average[IMU_MAGZL]-imu_average[IMU_MAGZH])/350;
#endif //HBC](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-90-320.jpg)
![15 Softwareanpassung 92
15.5 Umrechnungsfunktionen
In der Datei convert.c werden die Umrechnungen zwischen den Bitwerten der Analog-
Digital-Umsetzer und den physikalischen Einheiten vorgenommen. Hierzu wurden in
der gegebenen Datei die benötigten Codeblöcke dupliziert, in defines eingeschlossen
und die aus der Kalibrierung erhaltenen Werte eingetragen.
Ebenso erfolgt hier die Anpassung der Wirkrichtung.
Für zukünftige weitere Autopiloten wird es aufgrund der jeweils unterschiedlichen
Kalibrierwerte erforderlich sein weitere Unterscheidungen der Baugruppen zu tätigen.
#ifdef HBC
void accel2ms2( void ) {
accel[ACC_X] = (float)(imu_average[IMU_ACCX])/5235*9.81;
accel[ACC_Y] = (float)-(imu_average[IMU_ACCY])/5228*9.81;
accel[ACC_Z] = (float)(imu_average[IMU_ACCZ])/5441*9.81;
}
#endif //HBC
Auf gleiche Weise erfolgt die Anpassung bei den Gyroskopdaten. Hier fiel jedoch auf,
dass in der Berechnungsfunktion ein Fehler vorliegt.
Korrekt müsste die Berechnung
Bitwert
Konvwert = (15.1)
π * Faktor
Lauten und nicht wie in der Funktion angegeben.
π
Konvwert = Bitwert * (15.2)
Faktor
Da bei einer Korrektur des Fehlers in der convert.c alle nachfolgenden
Regelalgorithmen ebenso angepasst werden müssten, wurde der Fehler übernommen.
Bei Fortsetzung des Projekts sollte dieser Fehler umgehend behoben werden. Die
Ausgegebenen Werte befinden sich somit nicht in der gewollten Einheit rad/s.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-92-320.jpg)
![16 Kalibrierung 93
#ifdef HBC
void gyro2rads( void ) {
gyro[G_ROLL] = (float)-(imu_average[IMU_ROLL]);
gyro[G_ROLL] *= PI / 1381 ;
gyro[G_PITCH] = (float)-(imu_average[IMU_PITCH]);
gyro[G_PITCH] *= PI / 1388 ;
gyro[G_YAW] = (float)(imu_average[IMU_YAW]);
gyro[G_YAW] *= PI / 1388 ;
}
#endif //HBC
16 Kalibrierung
Für einen späteren völlig autonomen Flugbetrieb eine Quadrokopters ist eine
Kalibrierung der Sensoren erforderlich.
Es werden hierzu den Sensoren definierte Bedingungen auferlegt und die Antworten der
Sensoren aufgezeichnet. Als Antworten werden die von den ADC’s gelieferten
Rohdaten ohne einen Offsetausgleich verwendet. Diese werden über die Debug-Routine
dbg_imu_full über die serielle Schnittstelle ausgegeben und per PC gelesenen und in
Dateien geschrieben. Hierbei hat es sich bewährt für jede neue Positionierung der IMU
eine eigenen Datei anzulegen. Wichtig ist auch noch einer Umpositionierung die Daten
erst mitzuschreiben, wenn sich die Lage der IMU stabilisiert hat. Die Daten werden
etwa 1 Minute mitgeschrieben, was ca. 1000 Messwerten entspricht. Aus diesen 1000
Messwerten wird der arithmetische Mittelwert gebildet, der wiederum zur Berechnung
der Faktoren verwendet wird, welche in die Konvertierungsroutine eingetragen werden.
16.1 Drehratensensoren
Für die Kalibrierung der Drehratensensoren muss eine konstante Drehbewegung mit
bekannter Drehgeschwindigkeit zur Verfügung gestellt werden.
Als einfache Methode bot sich hier ein Plattenspieler an. Das bereitgestellte Gerät
verfügt über 2 Geschwindigkeitsstufen von 33 1/3 U/min und 45 U/min, angetrieben
durch einen Gleichstrommotor. Als Problem stellte sich die Genauigkeit der Drehzahl](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-93-320.jpg)



![16 Kalibrierung 97
Die aus den bei der Kalibrierung aufgenommen Daten errechneten Mittelwerte sind im
Anhang in den Tabellen Tabelle 21.7 - Tabelle 21.12 aufgeführt. Die eigentlichen
Messwerte sind aufgrund ihrer hohen Anzahl nicht einzeln aufgeführt, diese sind im
SVN [14] abrufbar . Wie auch bei den Gyroskopen befindet sich im Anhang auch für
die Beschleunigungssensoren für jeden Sensor jeder Achse eine grafische Darstellung
der Messwerte sowie ein Histogramm zur Darstellung der Häufigkeitsverteilung der
Messwerte (Bild 21.65 - Bild 21.73) um die Integrität der Messwerte zu überprüfen.
In diesen Diagrammen sind bei einigen Sensoren Ausreißer zu erkennen, welche bereits
deutlich negative Auswirkungen auf die Form der Glockenkurve haben (Bild 21.63).
Einzelne geringe Ausreißer sind jedoch möglich und können toleriert werden.
Aus diesen Tabellen wurden für jede Achse von jedem Sensor bei +1g, -1g sowie 0g die
Daten in einer je Tabelle zusammengefasst (Tabelle 16.5 - Tabelle 16.9). Der Wert für
0g ist wiederum ein Mittelwert aus den vier Werten, welche bei der Messung der
anderen Achsen für X=0g gemessen wurden. Für die Berechnung des Korrekturfaktors,
welcher in der Konvertierungsroutine einzutragen ist, wurde jeweils zwischen +1g und
0g sowie zwischen –1g und 0g die Betragsdifferenz gebildet. Beide Werte sollten nahe
beieinander liegen und sich nur innerhalb des üblichen Sensorrauschens (+- 150Bit)
bewegen. Zur Bildung des Korrekturfaktors wird noch einmal der Mittelwert von
beiden Betragsdifferenzen gebildet.
Betrachtet man die aus den in der Kalibrierung gemessenen Werten errechneten
Differenzen so zeigen sich wirklich nur geringere Abweichungen. Dies bedeutet, dass
die Sensoren sowohl im positiven als auch in negativen Messbereich nahezu gleiche
Beträge liefern.
Der in der Planung erhoffte Vorteil gegenüber des LIS Sensoren von ST hat sich somit
bestätigt. Im Gegensatz zu den LIS Sensoren, welche in Versuchen unterschiedliche
Ergebnisse im positiven und negativen Messbereich lieferten (+1g/-0,8g), zeigen die
Analog Devices Sensoren sehr gute Ergebnisse.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-97-320.jpg)

![17 Aufbau des Quadrokopters 99
Tabelle 16.9: Kalibrierwerte Z2-Achse
ACC Z2 Messwert in Bit
+1g 29630
0g 26487
-1g 23371
|+1g – 0g| 3143
|-1g – 0g| 3116
Korrekturfaktor 3129,5
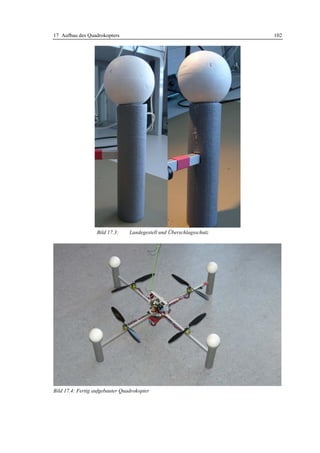
17 Aufbau des Quadrokopters
Als Nachweis der Funktionstüchtigkeit der neuen Hardware sollte diese in einem
Quadrokopter eingesetzt werden. Ein Quadrokopter ist eine Schwebefluggerät mit 2
rechts bzw. 2 linksdrehenden Luftschrauben der ausschließlich durch
Drehzahlveränderung der elektrischen Antriebsmotoren gesteuert wird. Quadrokopter
sind von Hand nicht fernzusteuern und benötigen drei Drehratensensoren um einen
stabilen Flug zu ermöglichen. Es handelt sich um ein inhärent instabiles Flugsystem
welches durch die Basisregelung stabilisiert werden muss. Beschreibungen der
Algorithmen des Steuerverfahrens können den Arbeiten [2], [3] und [5] entnommen
werden.
17.1 Rahmenbau
Der Aufbau des Rahmen erfolgte aus Aluminiumprofilen mit quadratischem
Querschnitt und 10mm Kantenlänge. Der Abstand der Motorachsen wurde mit 400mm
gewählt. Zum Erreichen einer möglichst hohen Stabilität wurden die Profile jeweils
einseitig ausgeklinkt. Durch die so gebildete Verschachtelung ergibt sich in Verbindung
mit zwei Zentralen, jeweils unten und oben angeordneten Platten die größtmögliche
Stabilität. Bei den verwendeten zentralen Platten handelt es sich um 1,5mm starkes FR4
Platinenmaterial ohne Kupferauflage. Die Platten besitzen eine Kantenlänge von 75mm.
Überflüssiges Material in Zwischenräumen wurde zur Gewichtsreduzierung entfernt.
Zur Montage des Autopiloten sind zusätzliche Stege mit Befestigungsbohrungen mit
30mm Abstand parallel zu den Flugachsen vorgesehen worden, in denen die Elektronik
mit Abstandsbolzen montiert werden kann. Der Entwurf der Platten erfolgte mit Eagle.
Die Strukturen wurden anschließend wie bei einer normalen Leiterplattenherstellung
fotolithographisch auf das Kupfer übertragen, geätzt und die Platten anhand der
Kupferstrukturen ausgesägt. Dies Verfahren erwies sich als schneller und einfacher als](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-99-320.jpg)



![18 Erfahrungen bei der Inbetriebnahme und Integration 105
Bild 18.2: Ausgangsspannung zu Eingangsspannung
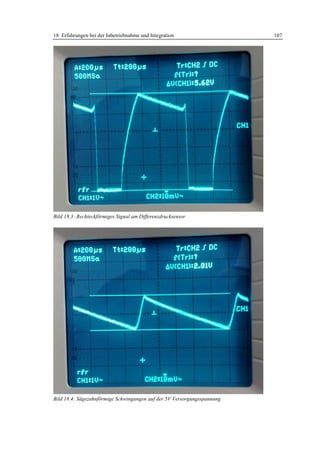
18.3 Sonstige Fehler
18.3.1 Schwingen mehrere Versorgungsspannungen
Bei den eingelesenen Werten des Differenzdrucksensors fiel eine starke Schwankung
der Werte zwischen annähernd 0 und annähernd Maximum auf, die erst einmal nicht zu
erklären waren. Eine Überprüfung des Eingangssignals am ADC per Oszilloskop ergab
einen rechteckförmigen Signalverlauf, welcher die Schwankung erklärte (Bild 18.3).
Die Werte die der ADC lieferte, waren somit scheinbar korrekt und ein Softwarefehler
unwahrscheinlich. Die Kontrolle des Eingangssignal am Operationsverstärkereingang
und des Ausgangssignals am Differenzdrucksensor zeigten einen sägezahnförmigen
Verlauf mit einer Frequenz von ca. 420Hz. Eine weitere Kontrolle der analogen 5V
Betriebsspannung zeigte einen überlagerten Sägezahn von 1,8V (Bild 18.4). Es lag nun
nahe, dass der Spannungsregler ein Schwingen verursachte. Eine Kontrolle der
Schaltung, des Layouts und des Datenblatts ergab jedoch keinen Fehler. Nach
Datenblattangaben [D3] war die Beschaltung so gewählt, dass sich der Regler in einem
absolut stabilen Bereich befindet. Auch die verwendeten Kondensatoren waren für
diesen Anwendungszweck geeignet. Linear Technology schreibt für die
Ausgangskondensator einen maximalen ESR von 3Ω vor. Die verwendeten
Kondensatoren haben einen ESR von 1,8Ω (10V) bzw. 1,5Ω (6,3V), und sind somit
geeignet.](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-105-320.jpg)

![18 Erfahrungen bei der Inbetriebnahme und Integration 108
18.3.2 Einbrüche in der digitalen 5V Versorgung
Bei den Untersuchungen der Schwingungen auf den Versorgungsspannungen fiel auf,
dass auf der digitalen 5V Versorgung der IMU, nadelförmige Einbrüche der Spannung
auf ca. 4V vorhanden waren. Diese Einbrüche traten Zeitgleich mit dem Flip-Impuls der
Magnetsensoren auf. Die Spannungsversorgung war nicht in der Lage den Ladestrom
der Kondensatoren nach einem Flip-Impuls auszugleichen. Daher wurde die
Versorgung mit einem 150µF Tantalelektrolytkondensator gepuffert, was das Problem
nahezu behob.
18.3.3 Störungen auf dem I²C Bus
Während der ersten Inbetriebnahme und Tests der Motoransteuerung fiel ein Stottern
der Motoren auf. Während der Tests der Motorsteller war jedoch ein gleichmäßiger
Lauf der Motoren festgestellt worden.
Die Überprüfung des Signalverlaufs am I²C Bus ergab, dass der Signalpegel nicht
immer 0V erreichte sondern nur etwa 1V. Der Verdacht fiel hierbei auf die
ungewöhnlich niedrigen Pullup-Widerstände, welche im Datenblatt für den PCA9306
[31] vorgeschlagen wurden. Es war durchaus möglich, dass die auf den Motorstellern
verbauten ATMEGA8 Mikrocontroller nicht in der Lage waren, den Signalpegel
vollständig auf 0V zu ziehen.
Da bereits ein Prototyp des Pegelwandler mit eigentlich falsch bestückten PullUp
Widerständen einwandfrei funktionierte, wurde beschlossen, die funktionierenden
Werte von 3,3kΩ zu übernehmen.
Nach Austausch der Widerstände waren keine Störungen mehr messbar, die Funktion
somit einwandfrei.
18.3.4 Motorstörungen
Während der Inbetriebnahme für den Flugbetrieb stellten sich an den Motoren zeitweise
merkwürdige Störungen an den Motoren ein, welche sich darin äußerten, dass die
Motoren stotterten. Die Motoren liefen schlagartig kurzzeitig auf eine höhere Drehzahl
um danach sofort wieder in der Solldrehzahl zu arbeiten. Zwar hatten diese Störungen
keine oder nur geringe Auswirkungen auf die Flugeigenschaften, jedoch ist eine
Beseitigung obligatorisch. Problematisch stellte sich heraus, dass der Fehler nicht
dauerhaft vorhanden war, was die Fehlersuche erschwerte.
Für die Fehlersuche musste zunächst ermittelt werden, ob die Störungen durch
Sensorwerte oder durch die Fernbedienung oder durch die Hardware allgemein
verursacht wurden. Hierzu wurde zunächst die Einbindung der Sensordaten der
Beschleunigungssensoren und Gyroskope unterbunden, so dass nur noch Signale der
Fernsteuerung Einfluss nahmen. Im Ergebnis waren danach keine Störungen mehr
feststellbar. Auch nach Einbindung der Beschleunigungssensoren zeigte eine
einwandfreie Funktion. Sobald jedoch wieder die Gyroskope mit eingebunden wurden](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-108-320.jpg)




![21 Anhang 114
21 Anhang
21.1 Referenzliste
21.1.1 Literaturerzeichnis
[1] Studienarbeit, Henning Sauerland, Andreas Dei, SS2007, Hochschule Bremen
[2] Diplomarbeit, Andreas Kleinert, SS2008, Hochschule Bremen
[3] Bachelorthesis, Christoph Niemann, WS2008/2009, Hochschule Bremen
[4] Forum http://www.mikrokopter.de, http://forum.mikrokopter.de/topic-
post67563.html, Post 29ff, 19.03.09
[5] Waypoint Navigation, Stabilization and Sensor Drift Compensation of VTOL MAV,
Pfrof. Dr. Heinrich Warmers, Andreas Kleinert, Juli 2008
[6] Wikipedia, Strömung nach Bernoulli und Venturi,
http://de.wikipedia.org/wiki/Strömung_nach_Bernoulli_und_Venturi, 03.12.2008
[7] Semesterprojekt 8, WS2006/2007, http://www.isms.hs-
bremen.de/dokuwiki/doku.php?id=elem:projekte:projekt8:sensorgruppe:sensoren
[8] http://www.mikrokopter.de/ucwiki/MK3Mag, 15.12.2008
[9] Digikey, http://www.digikey.de, 08.12.2008
[10] Wikipedia, http://de.wikipedia.org/wiki/Lithium-Polymer-Akkumulator,
04.12.2008
[11] Elektor 1/2006, S. 32ff, SMD-Lötofen
[12] http://www.mikrokopter.de/ucwiki/BrushlessCtrl, 28.02.2009
[13] http://paparazzi.enac.fr/wiki/Tiny, 27.11.2008
[14] SVN, Akaflieg, Labor ELEM, Hochschule Bremen, https://www.akaflieg.hs-
bremen.de/trac/akaflieg/browser
[D1] Datenblatt, Linear Technology, LTC2440, Rev. C
[D2] Datenblatt, Linear Technology, LTC2400, Rev. A
[D3] Datenblatt, Linear Technology, LT1761, Rev. C
[D4] Datenblatt, Analog Devices, ADXRS610, Rev. 0
[D5] Applikationsbericht, Freescale Semiconductor, AN1646, Rev. 2
[D6] Datenblatt, Maxim, MAX6605, Rev. 2
[D7] Datenblatt, NXP, LPC2148, Rev. 01](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-114-320.jpg)
![21 Anhang 115
[D8] Benutzerhandbuch, NXP, LPC2148, Rev. 02
[D9] Datenblatt, NXP, LPC2294, Rev. 7
[D10] Datenblatt, Texas Instruments, TMS320F28335, SPRS439E
[D11] Datenblatt, Philips Semiconductors, KMZ51, 13.06.2000
[D12] Applikationsbericht, Philips Semiconductors, AN00022, 30.03.2000
[D13] Datenblatt, PNI, MicroMag3, 04.2005
[D14] Datenblatt, Maxim, MAX1168, Rev. 0
[D15] Datenblatt, Texas Instruments, PTH08080, SLTS235C
[D16] Datenblatt, InvenSense, IDG-300, 14.08.07
[D17] Datenblatt, MuRata, ENC-03, 29.03.99
[D18] Datenblatt, Analog Devices, ADXRS150, Rev. B
[D19] Datenblatt, Analog Devices, ADXRS300, Rev. B
[D20] Datenblatt, STMicroelectronics, LISY300AL, Rev. 1
[D21] Datenblatt, Melexis, MLX90609-R2, Rev. 002
[D22] Datenblatt, Analog Devices, ADXL330, Rev. A
[D23] Datenblatt, Analog Devices, ADXL320, Rev. 0
[D24] Datenblatt, Analog Devices, ADXL323, Rev. 0
[D25] Datenblatt, Freescale Semiconductor, MPXH6115, Rev. 3
[D26] Datenblatt, Freescale Semiconductor, MPXV7002, Rev. 0
[D27] Datenblatt, National Semiconductor, LM20, 30.10.2008
[D28] Datenblatt, National Semiconductor, LM1117, 04.2006
[D29] Datenblatt, Texas Instruments, TPS2015, SLVS159B
[D30] Datenblatt, Texas Instruments, PCA9306, SCPS113I
21.1.2 Abkürzungsverzeichnis
ADC Analog-Digital-Converter
DSP Digitaler Signal Prozessor
GPS Global Positioning System
I/O Input/Output
I²C Inter-Integrated Circuit
IMU Inertial Messurement Unit](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-115-320.jpg)
![21 Anhang 116
ISR Interrupt Service Routine
MEMS Micro-Electro-Mechanical System
MM3 MicroMag3
SPI Serial Peripheral Interface
USB Universal Serial Bus
21.1.3 Abbildungsverzeichnis
Bild 3.1: Blockschaltbild LPC2148 [D7] .................................................................. 15
Bild 3.2: Blockschaldbild LPC2294 [D9] ................................................................. 16
Bild 3.3: Blockschaltbild TMS320F28335 [D10]...................................................... 18
Bild 6.1: Blockschaltbild des Autopiloten.................................................................. 30
Bild 7.1: Versuchsaufbau für Gyroskop ADXRS610 ................................................. 34
Bild 8.1: Achsenanordnung der Leiterplatte ............................................................. 47
Bild 9.1: Pappmodell mit beiden übereinander gelegten Teilen ............................... 49
Bild 9.2: Pappmodell mit beiden einzelnen Teilen .................................................... 50
Bild 10.1: Testplatine für BGA Lötversuche............................................................ 55
Bild 10.2: Aufbereitete Lötpaste .............................................................................. 56
Bild 10.3: Testplatine mit aufgetragener Lötpaste .................................................. 56
Bild 10.4: Nach verlöten wieder entferntes BGA IC ............................................... 58
Bild 10.5: LISY300Al, oben links: Paste aufgetragen, oben rechts: Platziert, unten:
Verlötet 59
Bild 10.6: Y-Sensorplatine, bestückt noch nicht verlötet......................................... 60
Bild 10.7: Y-Sensorplatine, verlötet......................................................................... 61
Bild 10.8: Fertig bestückter Sensorplatinensatz...................................................... 61
Bild 11.1: MCU Platine vor dem Reflowprozess..................................................... 62
Bild 11.2: MCU Platine direkt nach dem Reflowprozess ........................................ 63
Bild 11.3: Oberseite MCU ....................................................................................... 64
Bild 11.4: Unterseite MCU...................................................................................... 64
Bild 11.5: Oberseite IMU ........................................................................................ 65
Bild 11.6: Unterseite IMU ....................................................................................... 65
Bild 11.7: MCU und IMU gesteckt .......................................................................... 66
Bild 11.8: MCU und IMU gesteckt .......................................................................... 66
Bild 12.1: Bereits eingeschrumpfter und am Quadrokopter montierter Motorsteller
67
Bild 12.2: GPS-Modul ............................................................................................. 68
Bild 12.3: Verbindung GPS-Modul mit Trägerplatine ............................................ 68
Bild 12.4: Programmieradapter .............................................................................. 69
Bild 13.1: LISY300AL im Funktionstest .................................................................. 71
Bild 13.2: ADXRS610 im Funktionstest................................................................... 71
Bild 15.1: Berechnetes Heading .............................................................................. 91
Bild 15.2: Rohdaten der Sensoren ........................................................................... 91](https://image.slidesharecdn.com/hb-autopilot-090814234735-phpapp02/85/Hb-Autopilot-116-320.jpg)


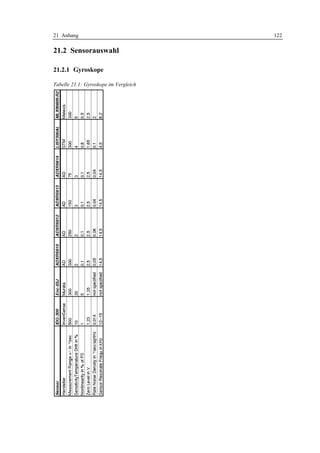
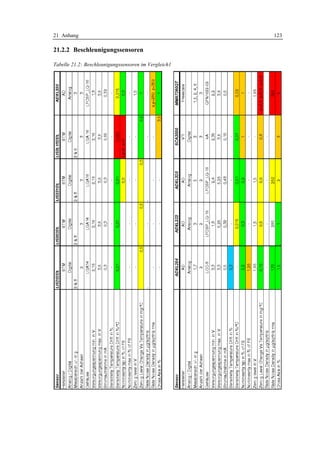
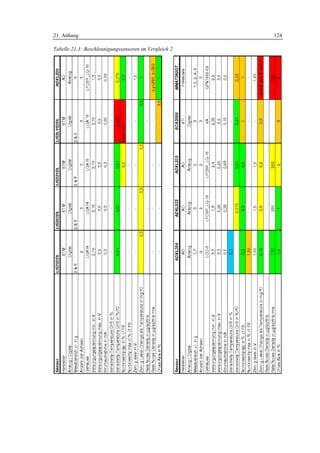
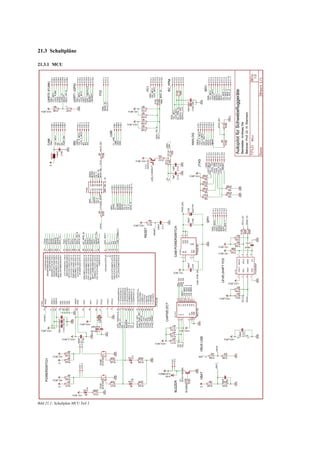

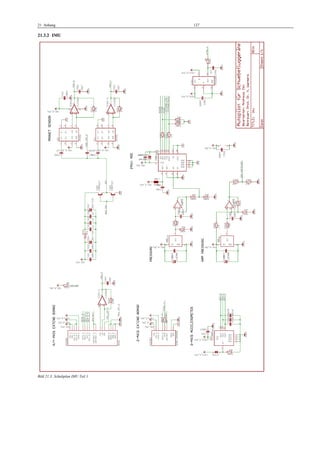
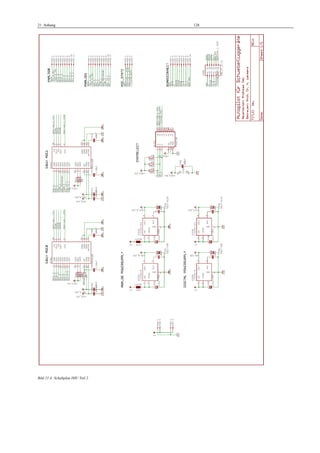
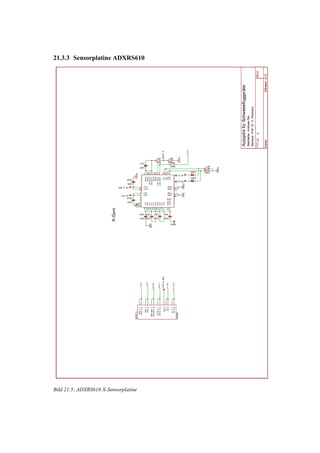
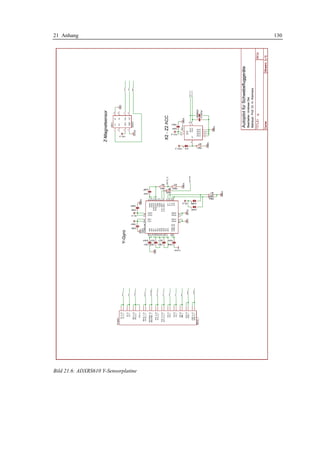


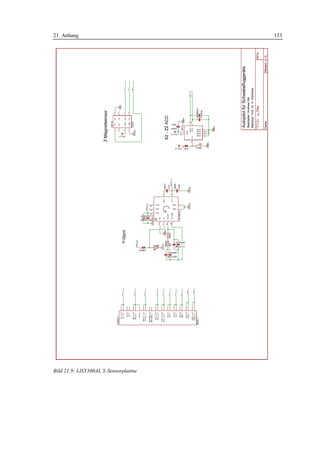
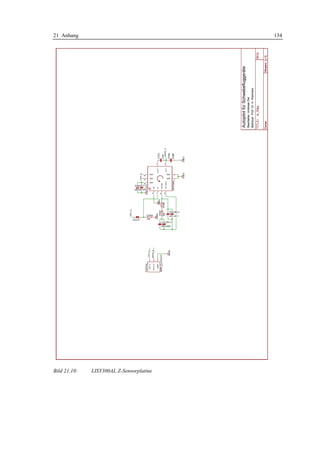
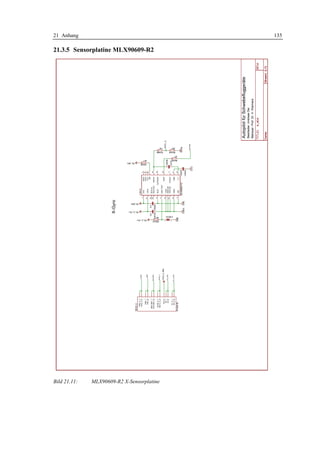
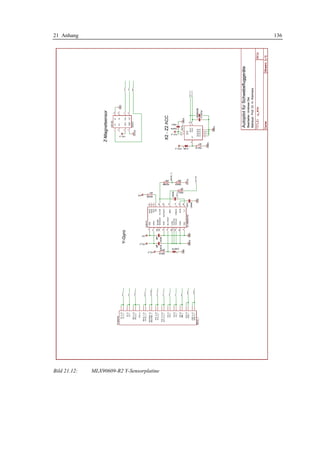









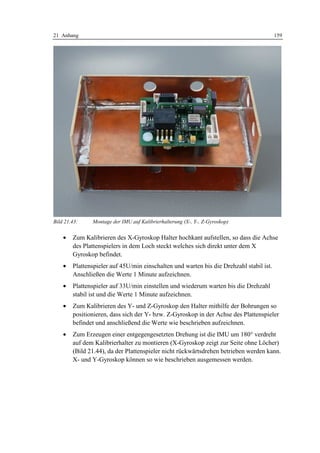
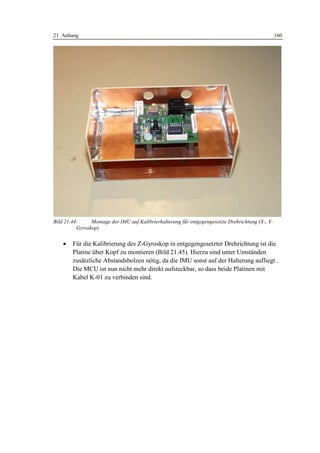
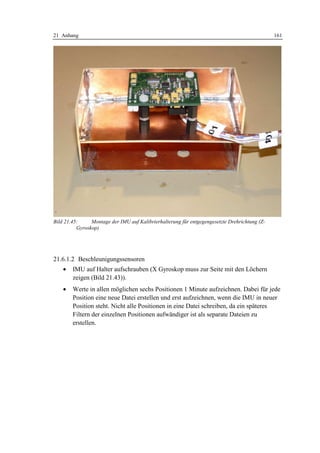

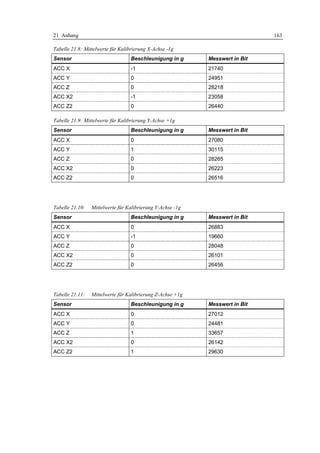
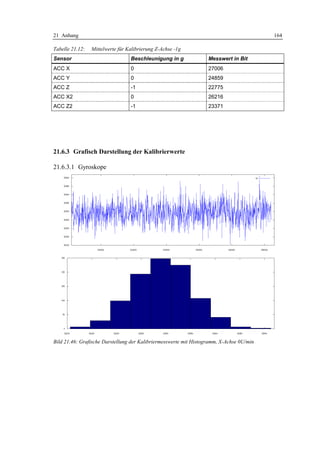








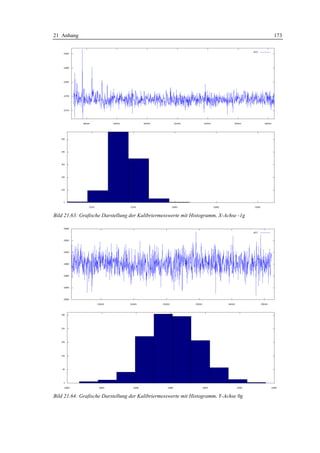

















![[DE] Dr. Ulrich Kampffmeyer - Artikel auf Wikipedia | 2015](https://cdn.slidesharecdn.com/ss_thumbnails/ulrichkampffmeyerartikelaufwikipedia2015-160322133808-thumbnail.jpg?width=640&height=640&fit=bounds)


































