Downloaden Sie, um offline zu lesen



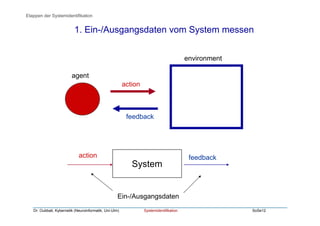
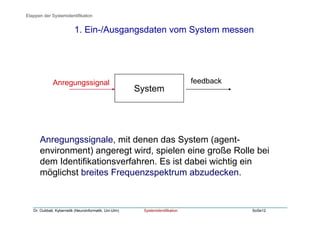
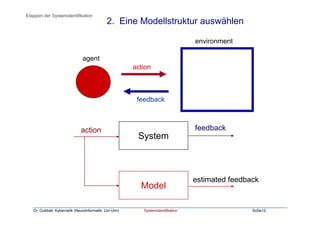



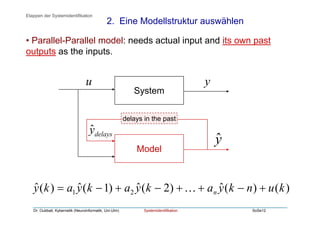









Das Dokument behandelt die Systemidentifikation, die Methoden und Algorithmen umfasst, um aus gemessenen Ein- und Ausgangsdaten empirische Modelle eines Systems zu erstellen. Es beschreibt die Schritte der Systemidentifikation, darunter das Messen der Daten, Auswahl der Modellstruktur, Anpassung der Parameter und Validierung des Modells. Verschiedene Modellstrukturen wie AR, MA und ARMA sowie Methoden zur Parameteranpassung wie die Methode der kleinsten Quadrate werden erläutert.























