Downloaden Sie, um offline zu lesen





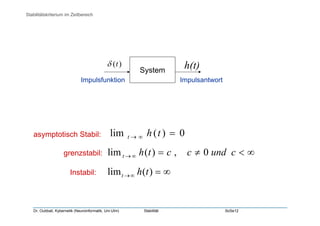




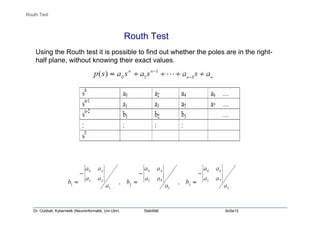

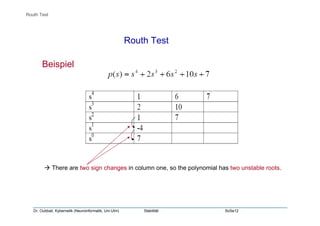

Das Dokument von Dr. Oubbati behandelt das Thema 'Stabilität' in der Kybernetik und Neuroinformatik. Es enthält Definitionen verschiedener Stabilitätsarten wie BIBO-Stabilität, asymptotische Stabilität, Grenzstabilität und Instabilität sowie Kriterien zur Bestimmung der Stabilität im Zeit- und Laplace-Bereich. Darüber hinaus wird das Routh-Testverfahren zur Analyse der Stabilität von Systemen erläutert.



























