Als PDF, PPTX herunterladen

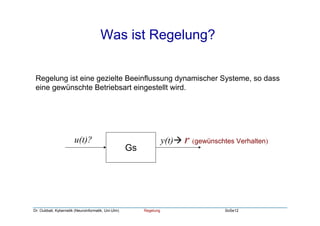
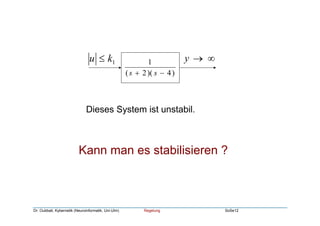


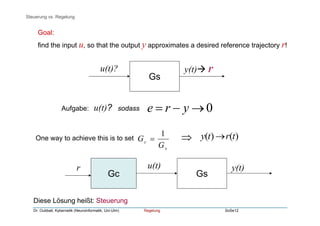

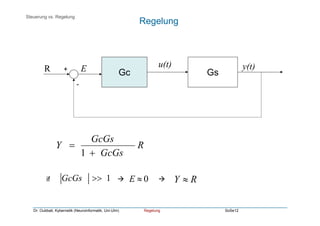


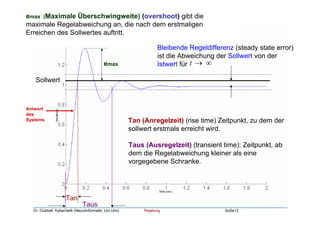


Das Dokument behandelt die Regelung und Steuerung dynamischer Systeme in der Kybernetik, erklärt grundlegende Konzepte wie Stabilität und die Forderungen an Regelkreise. Es wird darauf hingewiesen, dass eine Regelung darauf abzielt, den Ausgang eines Systems an ein gewünschtes Verhalten anzupassen, wobei Störungen berücksichtigt werden müssen. Zusätzlich werden die Anforderungen an Regelkreise, wie geringe Regelabweichung und kurzes Ansprechverhalten, thematisiert.



























