Beleg der Vorlesung "Simulation Dynamischer Systeme"
•
0 gefällt mir•181 views


Empfohlen
Weitere ähnliche Inhalte
Ähnlich wie Beleg der Vorlesung "Simulation Dynamischer Systeme"
Ähnlich wie Beleg der Vorlesung "Simulation Dynamischer Systeme" (8)
Mehr von Karla Carballo Valderrábano
Mehr von Karla Carballo Valderrábano (20)
Beleg der Vorlesung "Simulation Dynamischer Systeme"
- 1. BELEG SIMULATION DYNAMISCHER SYSTEME Technische Universität Ilmenau Fachbereich Technische Mechanik Fach: Simulation Dynamischer Systeme Thema: gekoppeltes System Karla Carballo Valderrabano Studiengang: Mechatronik Matrikel: 55850 Austauschprogramm: Mexikanische Jüngingeneure Ilmenau, 30.06.2016
- 2. Beleg Simulation Dynamischer Systeme Technische Universität Ilmenau Karla Carballo Valderrabano 1 Inhaltsverzeichnis 1. Aufgabe ...................................................................................2 2. Lösung der Aufgabe..................................................................2 2.1 Analyse des Systems........................................................................... 2 2.2 Parametrisiertes System..................................................................... 3 2.3 Simulation mit Alaska......................................................................... 4 2.3.1 Aufbau....................................................................................................................4 2.3.2 Ergebnisse der Simulation.....................................................................................6 3. Anhang 1 Modellbildung mit Lagrange .....................................9
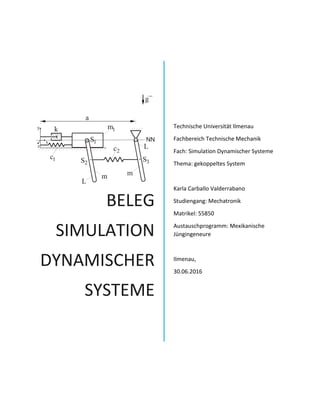
- 3. Beleg Simulation Dynamischer Systeme Technische Universität Ilmenau Karla Carballo Valderrabano 2 1. Aufgabe Simulieren Sie mit Hilfe von alaska den abgebildeten Mechanismus. Dabei sind folgende Fragestellungen mit alaska zu untersuchen: o Parameterisiertes Mehrkörpermodell o Zeitlicher Verlauf der generalisierten Koordinaten und Geschwindigkeiten bei vorgegebener Anfangsauslenkung von Körper 1 Bild 1 Mechanismus der Aufgabe 2. Lösung der Aufgabe 2.1 Analyse des Systems Dieses System besteht aus einen Kaste und zwei Zylinders. Die Kopplungen zwischen den Elementen des Systems und dem Fundament werden in der folgenden Tabelle gezeigt. Komponent 1 Komponent 2 Kopplung Fundament Kaste Prismatische (geometrisch) Fundament Kaste Feder 2 und Dämpfer (physikalisch) Kaste Zylinder 2 Zylindrische (geometrisch) Zylinder 1 Zylinder 2 Feder 1 (physikalisch) Fundament Zylinder 1 Zylindrische (geometrisch) Tabelle 1 Kopplungen des Systems Aufgrund diesen Kopplungen kann man sagen, dass das System ein Freiheitsgrad von 3 hat. In diesem Fall gibt es nur planarische Bewegungen, eine von ihnen ist die translatorische Bewegung in der x-Achse von dem Kaste und die anderen sind die rotatorische Bewegungen
- 4. Beleg Simulation Dynamischer Systeme Technische Universität Ilmenau Karla Carballo Valderrabano 3 oder Drehungen der Zylinders in dem z-Achse. Deswegen hat man 3 unterschiedliche Differentialgleichungen, um das System zu beschreiben (siehe Anhang 1). Man kann 2 unterschiedliche Subsystemen finden. Das erste Subsystem ist der Masse- Feder-Dämpfer, das eine gedämpfte Schwingung ergeben wird. Das zweite System sind die gekoppelte Oszillatoren, die die 2 Zylinder mit einem zwischengespannten Feder erzeugt, sie können zwei Schwingungsmoden haben, aber die Überlagerung dieser Moden ergibt Schwebung. Bild 2 Schwingungsmoden der gekoppelten Oszillatoren und ihre Schwebung Darüber hinaus, man kann folgern, dass die Bewegung des Kastes ein Einfluss in der Bewegung von der Zylinder2 hat. 2.2 Parametrisiertes System Für diese Aufgabe wurden die nächsten Dimensionen für jeden Element des Systems benutzt: 𝑎 = 0.6𝑚 Zylinder 1 und 2 𝐿 = 0.15𝑚 𝑅 = 0.01𝑚 Kaste ℎ = 0.12𝑚 ℎ2 = 0.2𝑚 Feder 1 𝑐1 = 12 𝑁 𝑚⁄ 𝜆01 = 0.05𝑚 Feder 2
- 5. Beleg Simulation Dynamischer Systeme Technische Universität Ilmenau Karla Carballo Valderrabano 4 𝑐2 = 8 𝑁 𝑚⁄ 𝜆02 = 0.05𝑚 Dämpfer 𝑘 = 7 𝑁𝑠/𝑚 In diesem Fall wird es das Aluminium als Material benutzt, dessen Dichte 2700 kg/m3 ist. Deswegen wurden die Massen des Kastes und der Zylinder: 𝑚1 = 𝑑 × 𝑉1 = 𝑑 × (ℎ)2 × ℎ2 = 2700 𝑘𝑔 𝑚3⁄ × (0.12𝑚)2 × 0.2𝑚 = 7.776 𝑘𝑔 𝑚 = 𝑑 × 𝑉 = 𝑑 × 𝜋 × 𝐿 × 𝑟2 = 2700 𝑘𝑔 𝑚3⁄ × 𝜋 × 0.15𝑚 × (0.1𝑚)2 = 0.127 𝑘𝑔 2.3 Simulation mit Alaska 2.3.1 Aufbau In dem folgenden Bild wird der Modellelementen des Systems gezeigt, die in der Simulation in Alaska benutzt wurden. Die zylindrische Kopplung zwischen dem Fundament und dem Zylinder 1 wird “RevoluteGroundCylinder1” genannt, der Feder zwischen beiden Zylinders “FrcSingle1”, die zylindrische Kopplung zwischen dem Zylinder 2 und dem Kaste “RevoluteCylinder2Box1”, der Feder zusammen mit dem Dämpfer von dem Kaste “FrcSingle2” und die prismatische Kopplung zwischen dem Fundament und dem Kaste “PrismaticGroundBox1”. Bild 3 Modellelemente des Systems
- 6. Beleg Simulation Dynamischer Systeme Technische Universität Ilmenau Karla Carballo Valderrabano 5 Manche koordinaten Systemen wurden gemacht, um die Kopplungen zu entwickeln. Sie, der Elemente, in dem sie gemacht wurden, ihre Kopplung, ihre Position und ihre Euler Winkel können in der folgende Tabelle bemerkt werden. Name Elemente Kopplung Position Euler Winkel Frame_G_Cil1 Ground RevoluteGroundCylinder1 (a, 0, 0) (0, PI/2, 0) Frame_G_Box_Pris Ground PrismaticGroundBox1 (a/4, h/2, 0) (PI/2, PI/2, 0) Frame_G_Box_D Ground FrcSingle2 (0, h/2, 0) (0, 0, 0) Frame_G_Cil1 Cylinder1 RevoluteGroundCylinder1 (0, R, L/2) (0, PI/2, 0) Frame_Cil1_Cil2 Cylinder1 FrcSingle1 (0, 0, 0) (0, 0, 0) Frame_Cil2_Box Cylinder2 RevoluteCylinder2Box1 (0, -R, L/2) (0, PI/2, 0) Frame_Cil1_Cil2 Cylinder2 FrcSingle1 (0, 0, 0) (0, 0, 0) Frame_G_Box_Pris Box1 PrismaticGroundBox1 (0, 0, 0) (0, 0, 0) Frame_G_Box_D Box1 FrcSingle2 (0, 0, 0) (0, 0, 0) Frame_Cil2_Box Box1 RevoluteCylinder2Box1 (-h/2, 0, 0) (PI/2, PI/2, 0) Tabelle 2 Koordinaten Systeme Für die Simulation wurde außerdem eine Auslenkung des Kastes benutzt, diese war: 𝑞1𝑖 = 𝑥1𝑖 = 0.15𝑚 In dem folgenden Bild wird das System gezeigt, wenn es schon in Alaska aufgebaut wurde. Bild 4 Aufgebautes System
- 7. Beleg Simulation Dynamischer Systeme Technische Universität Ilmenau Karla Carballo Valderrabano 6 2.3.2 Ergebnisse der Simulation Generalisierte Koordinaten Nach einem Gleichsgewichttest, wird das System während 15 Sekunden mit einem Zeitschritt von 0.05s simuliert. In dem folgenden Bild, wird der Position des Schwerpunktes von dem Kaste in dem x-Achse gezeigt. Es wird bemerkt, dass die Position des Kastes hat eine Überschwingung und dann ist es fast stabiliert, wie es gewartet wurde. Bild 5 Positionen des Kastes des Systems im x-Achse In dem nächsten Bild kann es nicht nur die Position des Kastes gesehen werde, sonder auch die Position der Schwepunkten von den Zylinders im x-Achse. Es kann bemerkt worden, dass die Position des Zylinders 2 eine Schwingung hat, die gegenphasig von der Schwingung der Position des Zylinders 1 ist, und dass sie eine Schwebung haben. Bild 6 Positionen der Körper des Systems im x-Achse
- 8. Beleg Simulation Dynamischer Systeme Technische Universität Ilmenau Karla Carballo Valderrabano 7 Es wurde gewartet, dass das System sich nicht im z-Achse bewegt wurde. In dem nächsten wird es gezeigt, dass sowohl der Kaste als auch die Zylinders bleiben in den gleichen Position im z-Achse währrend der Simulation, wie es gewartet wurde. Bild 7 Positionen der Körper des Systems im z-Achse In dem Bild 8 wird es gezeigt, die Positionen der Elementen des Systems im y-Achse. Wie es gewartet wurde, der Kaste bewegt sich nicht in dieser Richtung. Andererseits, haben die Zylinders wie im x Richtung eine gegenphasig Schwingung. Bild 8 Positionen der Körper des Systems im y-Achse
- 9. Beleg Simulation Dynamischer Systeme Technische Universität Ilmenau Karla Carballo Valderrabano 8 Geschwindigkeiten In den nächsten Bildern kann es bemerkt werden, dass während die Geschwindigkeit des Kastes eine Überschwingung und dann ein sinusoidal Verhalten hat, die Winkelgeschwindigkeiten der Zylinders ein sinusoidal Verhalten haben. Bild 9 Geschwindigkeit des Kastes Bild 10 Winkelgeschwindigkeit der Zylinders
- 10. Beleg Simulation Dynamischer Systeme Technische Universität Ilmenau Karla Carballo Valderrabano 9 3. Anhang 1 Modellbildung mit Lagrange a) Verallgemeinerte Koordinaten a. Freiheitsgrad 𝑛 = (3 × 6) − 5 − 5 − 5 = 3 b. Koordinaten: 𝑞1 = 𝑥1 𝑞2 = 𝜑2 𝑞3 = 𝜑3 b) Ortsvektoren 𝑟1⃗⃗⃗ = 𝑥1 𝑒 𝑥⃗⃗⃗⃗ = 𝑞1 𝑒 𝑥⃗⃗⃗⃗ (𝑟1⃗⃗⃗ )̇ = 𝑞1̇ 𝑒 𝑥⃗⃗⃗⃗ (𝑟1⃗⃗⃗ )̇ 2 = 𝑞1̇ 2 𝑟2⃗⃗⃗ = (𝑥1 + (𝐿 2)⁄ cos 𝜑2)𝑒 𝑥⃗⃗⃗⃗ − ((𝐿 2)⁄ sin 𝜑2)𝑒 𝑦⃗⃗⃗⃗ = (𝑞1 + (𝐿 2)⁄ cos 𝑞2)𝑒 𝑥⃗⃗⃗⃗ − ((𝐿 2)⁄ sin 𝑞2)𝑒 𝑦⃗⃗⃗⃗ (𝑟2⃗⃗⃗ )̇ = (𝑞1̇ − (𝐿 2)⁄ sin 𝑞2 𝑞2̇ )𝑒 𝑥⃗⃗⃗⃗ − ((𝐿 2)⁄ cos 𝑞2 𝑞2̇ )𝑒 𝑦⃗⃗⃗⃗ (𝑟2⃗⃗⃗ )̇ 2 = 𝑞1̇ 2 − 𝐿𝑞1̇ 𝑞2̇ sin 𝑞2 + (𝐿2 4)𝑞2̇ 2 ⁄ 𝑟3⃗⃗⃗ = (𝑎 + (𝐿 2)⁄ cos 𝜑3)𝑒 𝑥⃗⃗⃗⃗ − ((𝐿 2)⁄ sin 𝜑3)𝑒 𝑦⃗⃗⃗⃗ = (𝑎 + (𝐿 2)⁄ cos 𝑞3)𝑒 𝑥⃗⃗⃗⃗ − ((𝐿 2)⁄ sin 𝑞3)𝑒 𝑦⃗⃗⃗⃗ 𝜔2 = 𝜑2̇ = 𝑞2̇ 𝜔3 = 𝜑3̇ = 𝑞3̇ c) Massenträgheitsmomente 𝐽2 = 𝑚 2 𝑅2 𝐽3 = 𝑚 2 𝑅2 d) Kinetische Energie
- 11. Beleg Simulation Dynamischer Systeme Technische Universität Ilmenau Karla Carballo Valderrabano 10 𝑇 = 𝑇1 + 𝑇2 + 𝑇3 𝑇1 = 𝑇1𝑡𝑟𝑎𝑠 = 𝑚1 2 (𝑟1⃗⃗⃗ )̇ 2 = 𝑚1 2 𝑞1̇ 2 𝑇2 = 𝑇2𝑡𝑟𝑎𝑠 + 𝑇2𝑟𝑜𝑡 = 𝑚 2 (𝑟2⃗⃗⃗ )̇ 2 + 𝐽 2 𝜔2 2 = 𝑚 2 [𝑞1̇ 2 − 𝐿𝑞1̇ 𝑞2̇ sin 𝑞2 + (𝐿2 4)𝑞2̇ 2 ⁄ ] + 𝑚 4 𝑅2 𝑞2̇ 2 𝑇3 = 𝑇2𝑟𝑜𝑡 = 𝐽3 2 𝜔3 2 = 𝑚 4 𝑅2 𝑞3̇ 2 𝑇 = 𝑚1 2 𝑞1̇ 2 + 𝑚 2 [𝑞1̇ 2 − 𝐿𝑞1̇ 𝑞2̇ sin 𝑞2 + (𝐿2 4)𝑞2̇ 2 ⁄ ] + 𝑚 4 𝑅2 𝑞2̇ 2 + 𝑚 4 𝑅2 𝑞3̇ 2 e) Potentielle Energie 𝑈 = 𝑈1 + 𝑈2 + 𝑈3 + 𝑈𝑐1 + 𝑈𝑐2 𝑈1 = 0 𝑈2 = 𝑚𝑔𝑟2𝑦⃗⃗⃗⃗⃗ = − 𝑚𝑔𝐿 2 sin 𝑞2 𝑈3 = 𝑚𝑔𝑟3𝑦⃗⃗⃗⃗⃗ = − 𝑚𝑔𝐿 2 sin 𝑞3 𝑈𝑐1 = 𝑐1 2 (𝑥1 − 𝜆01)2 = 𝑐1 2 (𝑞1 − 𝜆01)2 𝑈𝑐2 = 𝑐1 2 (|𝜆2| − 𝜆02)2 𝜆2 = 𝑟3⃗⃗⃗ − 𝑟2⃗⃗⃗ = ((𝑎 + (𝐿 2)⁄ cos 𝑞3)𝑒 𝑥⃗⃗⃗⃗ − ((𝐿 2)⁄ sin 𝑞3)𝑒 𝑦⃗⃗⃗⃗ ) − ((𝑞1 + (𝐿 2)⁄ cos 𝑞2)𝑒 𝑥⃗⃗⃗⃗ − ((𝐿 2)⁄ sin 𝑞2)𝑒 𝑦⃗⃗⃗⃗ ) = (𝑎 − 𝑞1 + (𝐿 2)⁄ [cos 𝑞3 − cos 𝑞2])𝑒 𝑥⃗⃗⃗⃗ − ((𝐿 2)⁄ [sin 𝑞3 − sin 𝑞2])𝑒 𝑦⃗⃗⃗⃗ |𝜆2| = √(𝑎 − 𝑞1 + (𝐿 2)⁄ [cos 𝑞3 − cos 𝑞2])2 + ((𝐿 2)⁄ [sin 𝑞3 − sin 𝑞2])2 = √𝑎2 + 𝑞1 2 + 𝐿2 2 + 2𝑎𝑞1 + (𝑎𝐿 − 𝑞1 𝐿 − 𝐿2 2 ) (cos 𝑞3 − cos 𝑞2) 𝑈𝑐2 = 𝑐2 2 (√𝑎2 + 𝑞1 2 + 𝐿2 2 + 2𝑎𝑞1 + (𝑎𝐿 − 𝑞1 𝐿 − 𝐿2 2 ) (cos 𝑞3 − cos 𝑞2) − 𝜆02) 2
- 12. Beleg Simulation Dynamischer Systeme Technische Universität Ilmenau Karla Carballo Valderrabano 11 𝑈 = − 𝑚𝑔𝐿 2 sin 𝑞2 − 𝑚𝑔𝐿 2 sin 𝑞3 + 𝑐1 2 (𝑞1 − 𝜆01)2 + 𝑐2 2 (√𝑎2 + 𝑞1 2 + 𝐿2 2 + 2𝑎𝑞1 + (𝑎𝐿 − 𝑞1 𝐿 − 𝐿2 2 ) (cos 𝑞3 − cos 𝑞2) − 𝜆02) 2 f) Lagrange Funktion 𝐿 = 𝑇 − 𝑈 𝐿 = 𝑚 + 𝑚1 2 𝑞1̇ 2 − 𝑚𝐿 2 𝑞1̇ 𝑞2̇ sin 𝑞2 + 𝑚𝐿2 + 2𝑚𝑅2 8 𝑞2̇ 2 + 𝑚𝑅2 4 𝑞3̇ 2 + 𝑚𝑔𝐿 2 (sin 𝑞2 − sin 𝑞3) − 𝑐1 2 (𝑞1 − 𝜆01)2 − 𝑐2 2 (|𝜆2| − 𝜆02)2 g) Bewegungsdifferentialgleichungen a. Ableitungen Mit 𝜆2′ = 𝑎2 + 𝑞1 2 + 𝐿2 2 + 2𝑎𝑞1 + (𝑎𝐿 − 𝑞1 𝐿 − 𝐿2 2 ) (cos 𝑞3 − cos 𝑞2) 𝜕1 ̇ 𝐿 = (𝑚 + 𝑚1)𝑞1̇ − 𝑚𝐿 2 𝑞2̇ sin 𝑞2 (𝜕1 ̇ 𝐿)̇ = (𝑚 + 𝑚1)𝑞1̈ − 𝑚𝐿 2 (𝑞2̈ sin 𝑞2 + 𝑞2̇ 2 cos 𝑞2) 𝜕1 𝐿 = −𝑐1(𝑞1 − 𝜆01) − 𝑐2 2 (√𝜆2′ − 𝜆02)(𝜆2′)−1 2⁄ (2𝑞1 + 2𝑎 − 𝐿(cos 𝑞3 − cos 𝑞2)) 𝜕2 ̇ 𝐿 = − 𝑚𝐿 2 𝑞1̇ sin 𝑞2 + 𝑚𝐿2 + 2𝑚𝑅2 4 𝑞2̇ (𝜕2 ̇ 𝐿)̇ = − 𝑚𝐿 2 𝑞1̈ sin 𝑞2 − 𝑚𝐿 2 𝑞1̇ 𝑞2̇ cos 𝑞2 + 𝑚𝐿2 + 2𝑚𝑅2 4 𝑞2̈ 𝜕2 𝐿 = − 𝑚𝐿 2 𝑞1̇ 𝑞2̇ cos 𝑞2 + 𝑚𝑔𝐿 2 cos 𝑞2 − 𝑐2 2 (√𝜆2′ − 𝜆02)(𝜆2′)−1 2⁄ ((𝑎𝐿 − 𝑞1 𝐿 − 𝐿2 2 ) sin 𝑞2) 𝜕3 ̇ 𝐿 = 𝑚𝑅2 2 𝑞3̇ (𝜕3 ̇ 𝐿)̇ = 𝑚𝑅2 2 𝑞3̈
- 13. Beleg Simulation Dynamischer Systeme Technische Universität Ilmenau Karla Carballo Valderrabano 12 𝜕3 𝐿 = − 𝑚𝑔𝐿 2 cos 𝑞3 + 𝑐2 2 (√𝜆2′ − 𝜆02)(𝜆2′)−1 2⁄ ((𝑎𝐿 − 𝑞1 𝐿 − 𝐿2 2 ) sin 𝑞3) b. Dämpfung 𝐷 = 𝑘 2 𝑞1̇ 2 −𝜕1 ̇ 𝐷 = −𝑘𝑞1̇ c. Differentialgleichungen (𝑚 + 𝑚1)𝑞1̈ − 𝑚𝐿 2 (𝑞2̈ sin 𝑞2 + 𝑞2̇ 2 cos 𝑞2) + 𝑐1(𝑞1 − 𝜆01) + 𝑐2 2 (√𝜆2′ − 𝜆02)(𝜆2′)−1 2⁄ (2𝑞1 + 2𝑎 − 𝐿(cos 𝑞3 − cos 𝑞2)) = 𝐹 − 𝑘𝑞1̇ (1) − 𝑚𝐿 2 𝑞1̈ sin 𝑞2 + 𝑚𝐿2 + 2𝑚𝑅2 4 𝑞2̈ − 𝑚𝑔𝐿 2 cos 𝑞2 + 𝑐2 2 (√𝜆2′ − 𝜆02)(𝜆2′)−1 2⁄ ((𝑎𝐿 − 𝑞1 𝐿 − 𝐿2 2 ) sin 𝑞2) = 0 (2) 𝑚𝑅2 2 𝑞3̈ + 𝑚𝑔𝐿 2 cos 𝑞3 − 𝑐2 2 (√𝜆2′ − 𝜆02)(𝜆2′)−1 2⁄ ((𝑎𝐿 − 𝑞1 𝐿 − 𝐿2 2 ) sin 𝑞3) = 0 (3)