Downloaden Sie, um offline zu lesen




![2.3 Verzeichnung
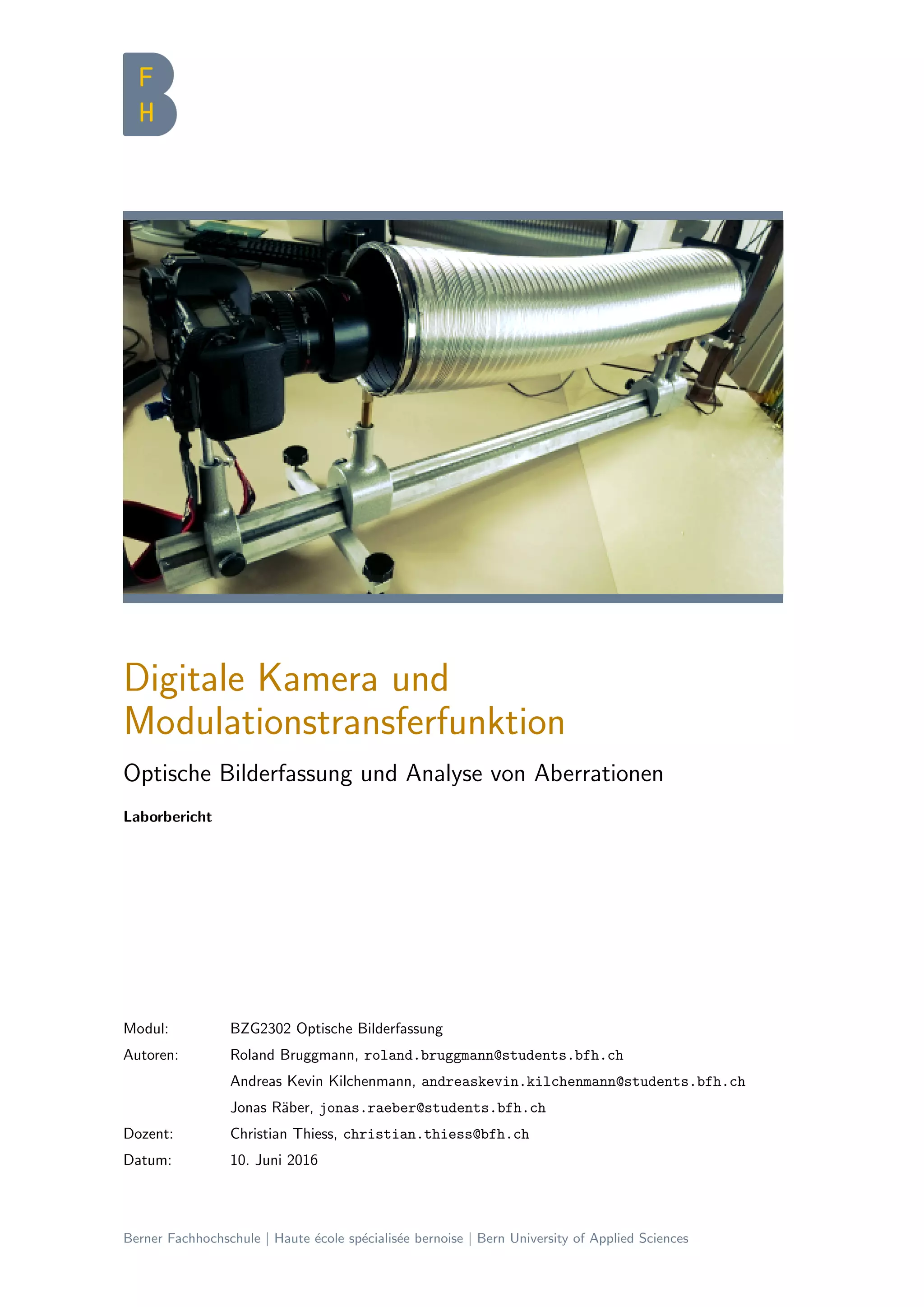
Die Verzeichnung (engl. distortion) ist eine monochromatische Seidel-Aberration (vgl. [Thi16, S. 7 ff.]). Dabei
handelt es sich um einen geometrischen Abbildungsfehler, bei dem sich das Abbildungsverh¨altnis in der Bildebene mit
zunehmendem Abstand von der optischen Achse ¨andert. Der Abbildungsfehler macht sich entweder als kissenf¨ormige
oder aber als tonnenf¨ormige Verzeichnung bemerkbar (siehe Abbildung 2.7).
Abbildung 2.7: (a) ohne Verzeichnung, (b) kissenf¨ormige und (c) tonnenf¨ormige Verzeichnung
2.3.1 Ergebnisse
Um die Verzeichnung zu ermitteln, wird zuerst ein Raster mit schwarzen Linien fotografiert. Die Verzeichnung ist
bei kurzen Brennweiten und kurzen Objektweiten am ausgepr¨agtesten. Deshalb w¨ahlten wir eine Brennweite von
32 mm und haben die Kamera m¨oglichst nah an das Objekt positioniert – gerade so, dass der gesamte Raster
abgelichtet wurde (siehe Abbildung 2.8).
Abbildung 2.8: Aufnahme des Rasters
In einem zweiten Schritt wurde eine Skala in die Diagonale von der Mitte in die obere rechte Ecke des Rasters gelegt
und ebenfalls ein Bild aquiriert (siehe Abbildung 2.9). Anhand eines Graustufenbildes dieser Aufnahme wurde mit
ImageJ das Ausmass der Verzeichnung gemessen (siehe Diagramm 2.10).
Abbildung 2.9: Aufnahme des Rasters mit Skala in der Diagonalen zur Berechnung der Verzeichnung
Digitale Kamera und Modulationstransferfunktion, Version 1.0, 10. Juni 2016 8](https://image.slidesharecdn.com/cpvr-optischebilderfassung-digitale-kamera-und-mtf-bruggmann-kilchenmann-raeber-170415181625/75/Digitale-Kamera-und-Modulationstransferfunktion-10-2048.jpg)
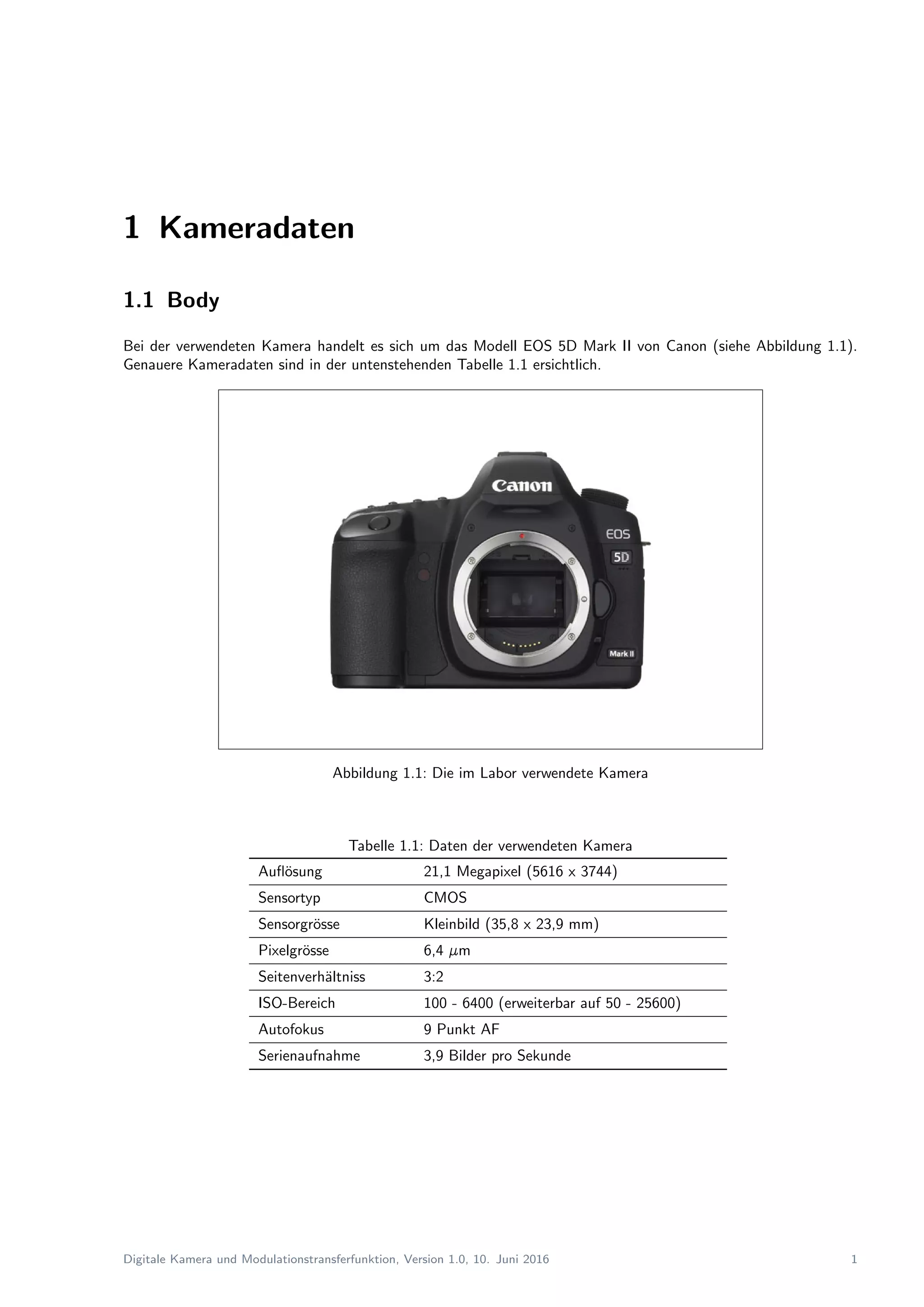
![Abbildung 2.10: Profil der diagonalen Skala zur Ermittlung der Verzeichnung. Die Minima entsprechen den Linien
der Skala.
Das Profil zeigt in der x-Achse den Abstand ausgehend von der Mitte des Bildes entlang der Diagonalen hin zur
linken oberen Ecke (Einheit: Anzahl Pixel). Die y-Achse zeigt die Graustufenwerte (y = 0 entspricht schwarz,
y = 255 entspricht weiss). Die schwarzen Wertelinien der Diagonalen-Skala im Graustufenbild sind im Profil gut
zu erkennen als Peaks nach unten mit Werten < 20. Die Abst¨ande der Peaks geben Aufschluss ¨uber das Ausmass
der Verzeichnung.
2.3.2 Diskussion
Wie die Peaks in Diagramm 2.10 zeigen, sind die Abst¨ande sehr regelm¨assig – das verwendete Objektiv hat prak-
tisch keine Verzeichnung. Qualitativ bessere Objektive k¨onnen ¨uber den Schliff der Linsen Aberrationen wie die
Verzeichnung bereits verhindern. Das von uns verwendete optische System enth¨alt eine asph¨arische Linse. Diese
dient [u.a.] zur Korrektion des ¨Offnungsfehlers wie z.B. der Verzeichnung ¨uber den gesamten Brennweitenbereich
(vgl. [CanonEF]).
Sollte dies nicht der Fall sein, kann die Verzeichnung auch per Software korrigiert werden. Diese M¨oglichkeit nutzen
Hersteller kosteng¨unstiger Kameras, indem sie das Bild mit den ihnen bekannten Werten der Verzeichnung bereits
auf dem Ger¨at korrigieren.
Eine Alternative dazu ist die Korrektur der Verzeichnung in einem Postprozess mit g¨angiger Software wie Lightroom,
Photoshop, GIMP o.¨a. Die Verzeichnung kann aber auch erw¨unscht sein und bewusst als k¨unstlerisches Element in
der Photographie eingesetzt werden.
Digitale Kamera und Modulationstransferfunktion, Version 1.0, 10. Juni 2016 9](https://image.slidesharecdn.com/cpvr-optischebilderfassung-digitale-kamera-und-mtf-bruggmann-kilchenmann-raeber-170415181625/75/Digitale-Kamera-und-Modulationstransferfunktion-11-2048.jpg)





![Literaturverzeichnis
[CanonEF] digitec Online. Canon EF 24-105mm, f/4 L IS USM. URL: https : / / www . digitec . ch / de /
s1/product/canon- ef- 24- 105mm- f4- l- is- usm- import- objektiv- 203623 (besucht am
09. 05. 2016).
[Thi16] Christian Thiess. Optical Imaging. Vorlesungsskript Fr¨uhlingssemester 2016. Biel/Bienne: BFH-TI,
2016.
Abbildungsverzeichnis
1.1 Die im Labor verwendete Kamera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Das im Labor verwendete Objektiv . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1 Aufgenommenes Bild f¨ur den Versuch zur Messung der Genauigkeit des Autofokussystems. . . . . . 3
2.2 Profil der Grauwerte des Linientargets als Schnitt von oben nach unten. . . . . . . . . . . . . . . . 4
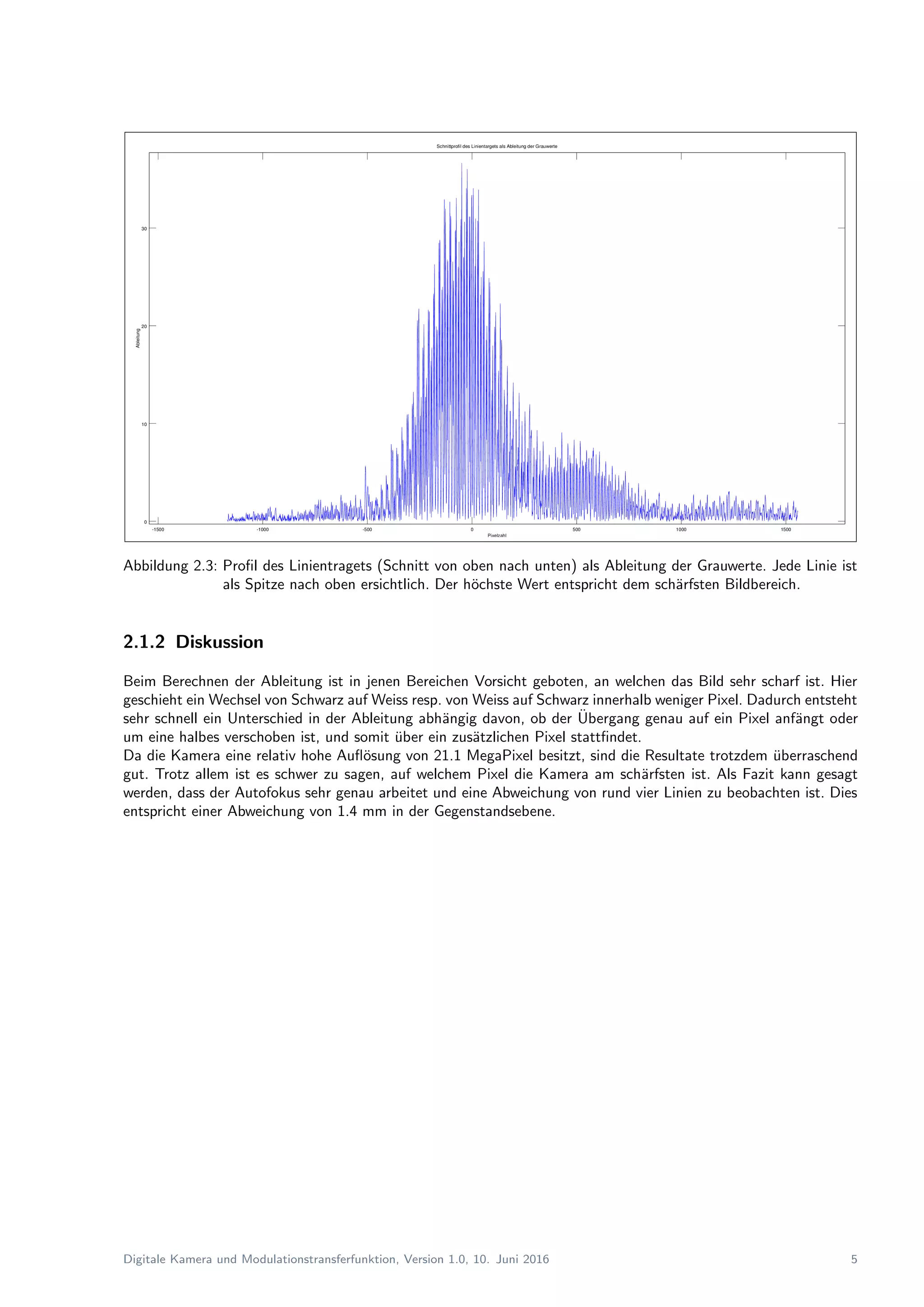
2.3 Profil des Linientragets als Ableitung der Grauwerte . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.4 Stouffer Step-Target . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.5 OECF der Kamera mit dem T4105-Target . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
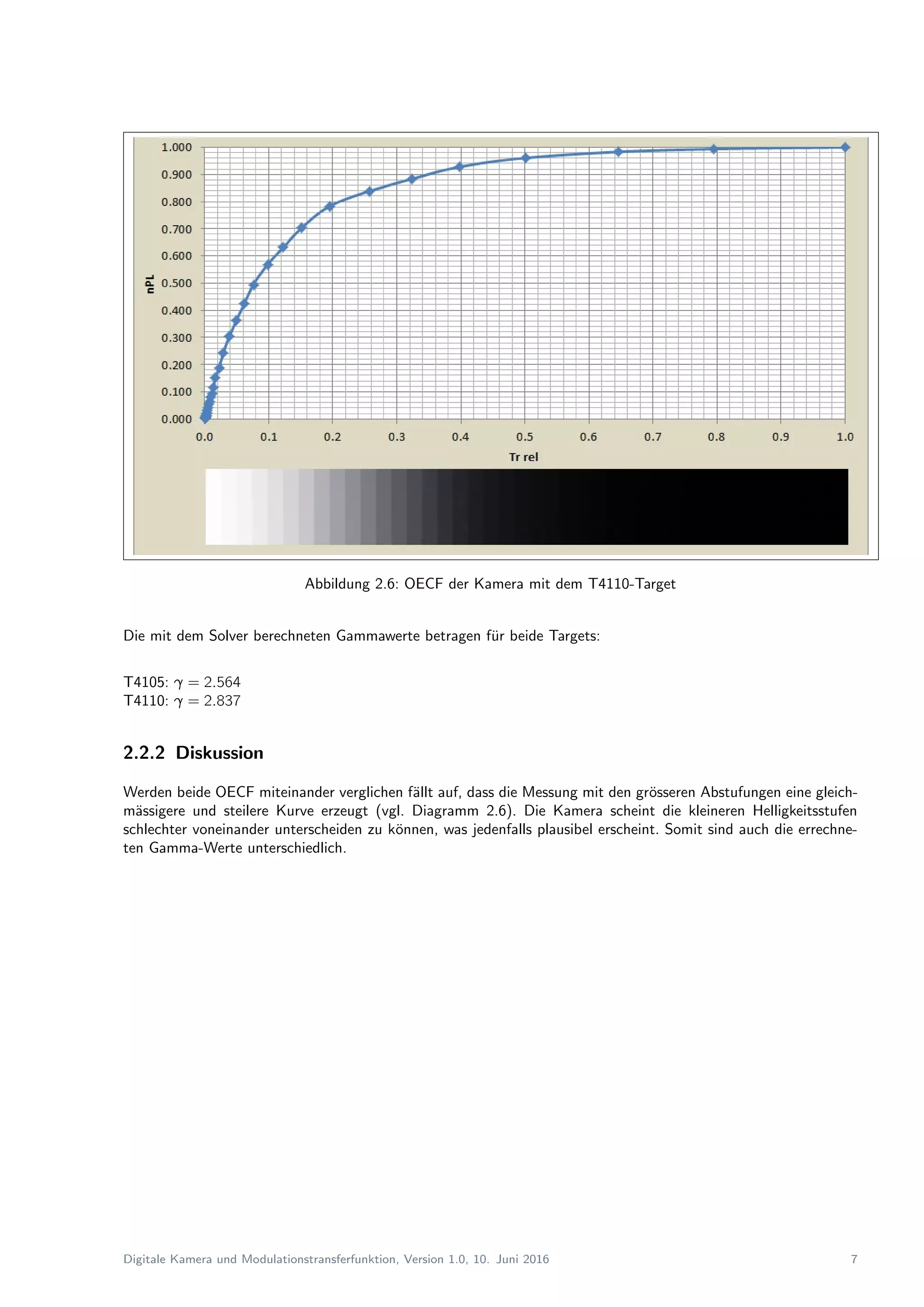
2.6 OECF der Kamera mit dem T4110-Target . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.7 (a) ohne Verzeichnung, (b) kissenf¨ormige und (c) tonnenf¨ormige Verzeichnung . . . . . . . . . . . 8
2.8 Aufnahme des Rasters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.9 Aufnahme des Rasters mit Skala in der Diagonalen zur Berechnung der Verzeichnung . . . . . . . . 8
2.10 Profil der diagonalen Skala zur Ermittlung der Verzeichnung . . . . . . . . . . . . . . . . . . . . . 9
3.1 Versuchsanordnung f¨ur die Messung der optischen Leistung . . . . . . . . . . . . . . . . . . . . . . 10
3.2 Target f¨ur die Messung der optischen Leistung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.3 Diagramm mit Kennlinien der optischen Leistung f¨ur die linke Kante bei Blende f 1/4 . . . . . . . . 11
3.4 Diagramm mit Kennlinien der optischen Leistung f¨ur die untere Kante bei Blende f 1/4 . . . . . . . 11
3.5 Diagramm mit Kennlinien der optischen Leistung f¨ur die linke Kante bei Blende f 1/8 . . . . . . . . 12
3.6 Diagramm mit Kennlinien der optischen Leistung f¨ur die untere Kante bei Blende f 1/8 . . . . . . . 12
3.7 Diagramm mit Kennlinien der optischen Leistung f¨ur die linke Kante bei Blende f 1/22 . . . . . . . 13
3.8 Diagramm mit Kennlinien der optischen Leistung f¨ur die untere Kante bei Blende f 1/22 . . . . . . 13
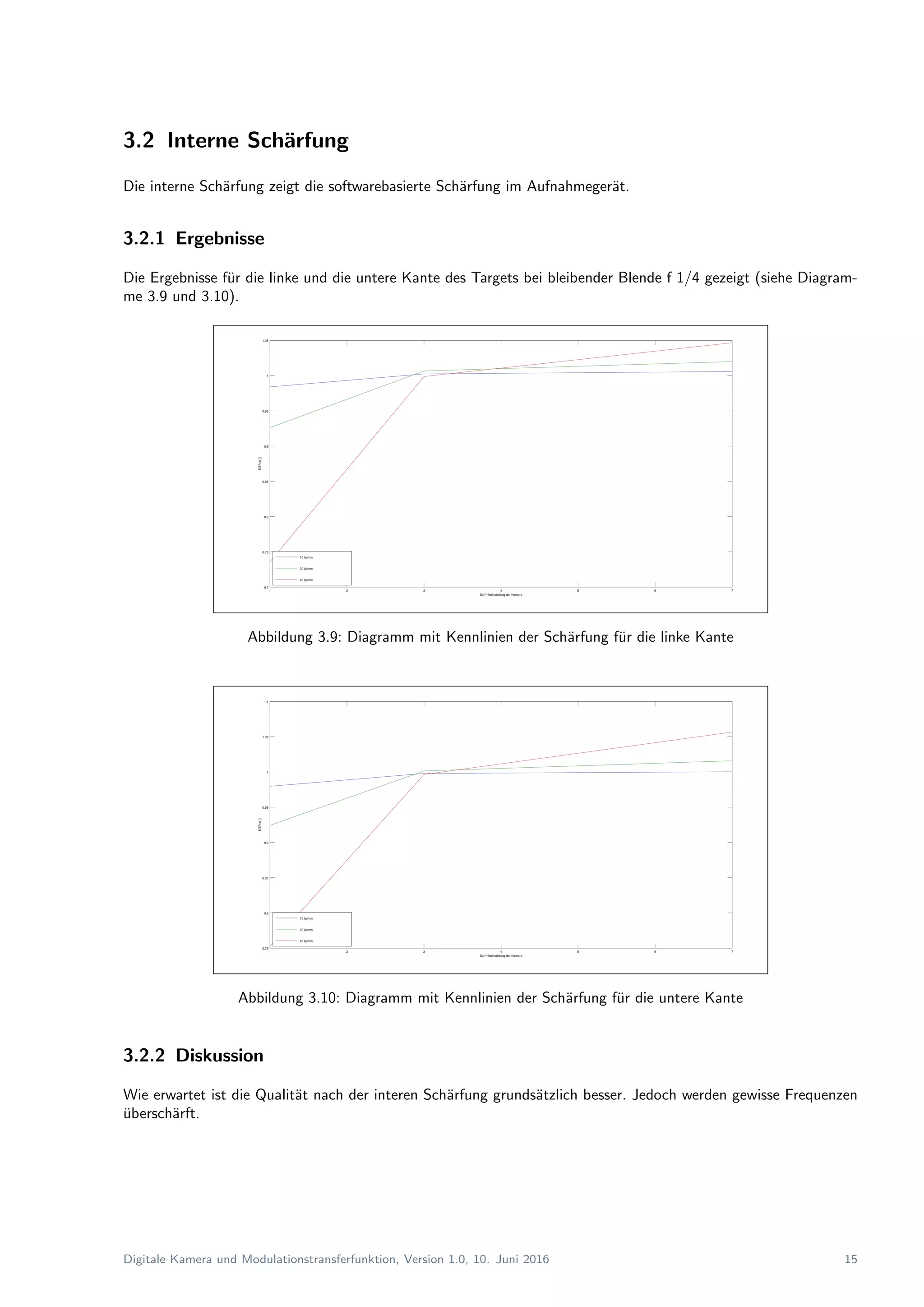
3.9 Diagramm mit Kennlinien der Sch¨arfung f¨ur die linke Kante . . . . . . . . . . . . . . . . . . . . . 15
3.10 Diagramm mit Kennlinien der Sch¨arfung f¨ur die untere Kante . . . . . . . . . . . . . . . . . . . . . 15
Tabellenverzeichnis
1.1 Daten der verwendeten Kamera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Digitale Kamera und Modulationstransferfunktion, Version 1.0, 10. Juni 2016 16](https://image.slidesharecdn.com/cpvr-optischebilderfassung-digitale-kamera-und-mtf-bruggmann-kilchenmann-raeber-170415181625/75/Digitale-Kamera-und-Modulationstransferfunktion-18-2048.jpg)


Das Dokument beschreibt einen Laborbericht zur optischen Bilderfassung mit der Canon EOS 5D Mark II und dem EF 24-105mm f/4 Objektiv. Es enthält analytische Tests zur Genauigkeit des Autofokus, Gamma-Wertbestimmung sowie zur Verzeichnung des Objektivs, und dokumentiert die Schritte zur Messung der Modulationsübertragungsfunktion (MTF). Die Ergebnisse zeigen eine präzise Autofokusgenauigkeit, unterschiedliche Gamma-Werte je nach Testverfahren und ein geringfügig verzeichnungsfreies Objektiv.