Als PDF, PPTX herunterladen
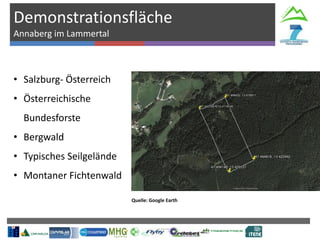

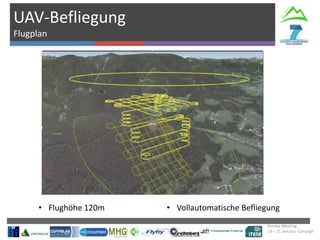

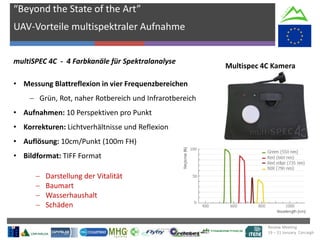
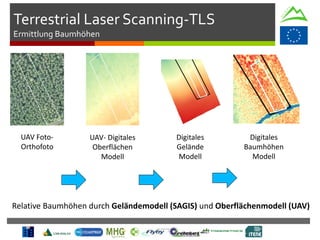

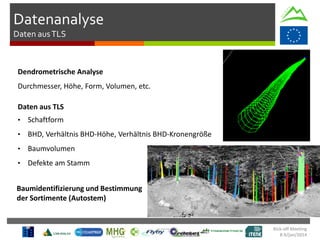
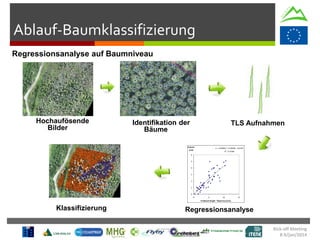
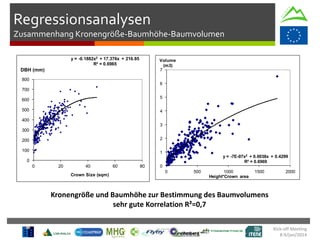
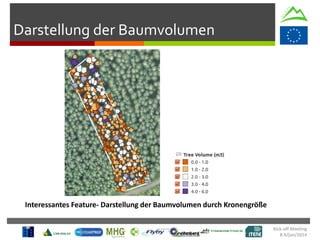

Das Dokument beschreibt eine Waldinventur, die mittels Drohnenbefliegung und terrestrischem Laserscanning durchgeführt wird, um Baumdaten zu erheben, einschließlich Baumhöhe, Vitalität und Schäden. Es werden verschiedene Technologien und Methoden zur Datenerfassung und -analyse vorgestellt, darunter multispektrale Kameras und Software zur Kommunikation und Datenverarbeitung. Ziel ist die präzise Erfassung und Klassifizierung von Bäumen in einem Demonstrationsgebiet in Österreich.















































