Als PDF, PPTX herunterladen
![Theoretische Ebene Technische Ebene
Mikrocode
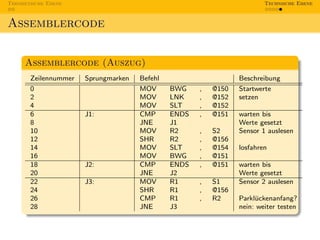
Microcode (Auszug)
Befehl Mikrocode
Befehl holen PCOUT , MARIN , Lesen, Inkrementieren
ZOUT , PCIN , MFC
MDROUT , IRIN
MOV LNK @xxx Adressfeld von IROUT , MARIN , Lesen
MFC
MDROUT , LNKIN
MUL R[i] @xxx Adressfeld von IROUT , MARIN , Lesen
R[i]OUT , XIN , MFC
MDROUT , Multiplizieren
ZOUT , R[i]IN
SHR R[i] @xxx Adressfeld von IROUT , MARIN , Lesen
R[i]OUT , XIN , MFC
MDROUT , Rechtsshift
ZOUT , R[i]IN](https://image.slidesharecdn.com/einparkhilfepraesentation-090722102029-phpapp02/85/Einparkhilfe-Prasentation-7-320.jpg)

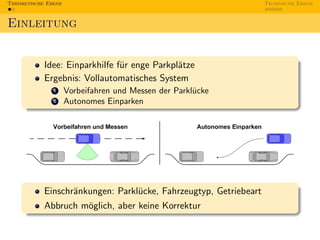
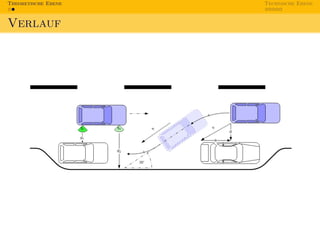
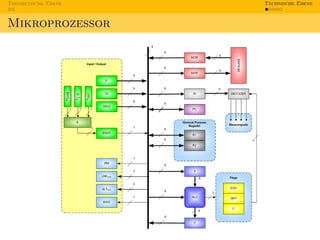
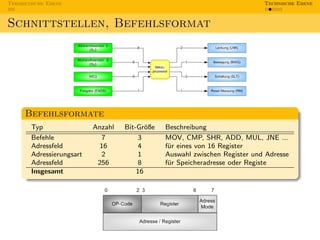
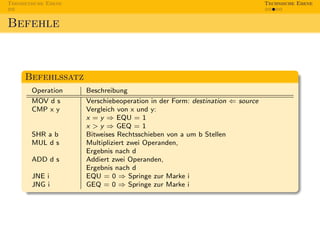
Das Dokument beschreibt ein automatisches Rückwärts-Einparkhilfesystem, das die Anforderungen und technischen Details eines vollautomatischen Systems für enge Parkplätze behandelt. Es erläutert die Verwendung von Mikroprozessoren, verschiedene Befehlsformate und Mikrocode sowie beispielhaften Assemblercode für die Implementierung des Systems. Einschränkungen werden genannt, wie Unterschiede in Parkplatztyp, Fahrzeugtyp und Getriebeart.
































