FOSS4G 2008: GRASS Development with Eclipse / CDT In the Distant Early Warning System (DEWS) Project

GRASS GIS is a valuable tool for complex data manipulation. It is often applied in the backend of a project to generate spatial data resources to be used with other software tools. The DEWS project requires siginifacnt amounts of spatial data resources. To establish reasonable production capacities, it is vital to have specifiv GRASS versions easily available on various platforms, preferably on different operating systems. GRASS developers can use integrated development environment (IDE) for efficent code development and software deployment. For this, the example of Eclipse in conjunction with the C-Development Tool (CDT) is used. It can be used to show how to access, manage and compile the GRASS sourcecode independently from the platform via the IDE. For developers the short-term benefits of this approach are extended options for collaborative development, code refactoring and the wrapping of the traditional building-chain in ant-Code. In the last years, IDEs have increasingly become the standard approach to code development. Most programmers have become used to them and take them for granted. To lower the curb to join the active GRASS developer community and to extend and rejuvenate the community in the long term, IDE-based platform-independent GRASS-development will play a prominent role in the future. This will help to future-safe GRASS GIS as a community-driven FOSS GIS project. The tsunami disaster affecting the Indian Ocean region on Christmas 2004 demonstrated the short-comings in tsunami detection, public warning processes as well as intergovern-mental warning message exchange in the Indian Ocean region. The Distant Early Warning System (DEWS) Project - aims at strengthening the early warning capacities by building interoperable tsunami early warning systems. DEWS provides a Reference Model for interoperable tsunami early warning systems and applies the Service Oriented Architecture (SOA) paradigm. Based on an Enterprise Service Bus (ESB) all resources (e.g. sensors) can be decoupled from proprietary access: A Service Layer provides uniform access to resources An Orchestration Layer to access workflows and processes for the early warning phase. The ESB concept is used in both the upstream and downstream part of DEWS. Of special importance is the distant communication of warning information among warning centres. The project complements the German Indonesian Tsunami Early Warning System-Project (GITEWS).
Empfohlen

Empfohlen
Weitere ähnliche Inhalte
Andere mochten auch
Andere mochten auch (17)
Mehr von Peter Löwe
Mehr von Peter Löwe (13)
FOSS4G 2008: GRASS Development with Eclipse / CDT In the Distant Early Warning System (DEWS) Project
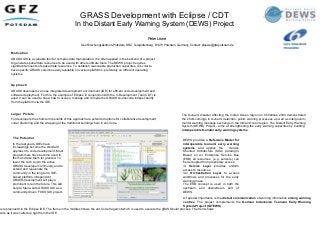
- 1. GRASS Development with Eclipse / CDT In the Distant Early Warning System (DEWS) Project Peter Löwe GeoForschungsZentrum-Potsdam, DRZ, Telegrafenberg, D1473 Potsdam, Germany, Contact: ploewe@gfz-potsdam.de The tsunami disaster affecting the Indian Ocean region on Christmas 2004 demonstrated the short-comings in tsunami detection, public warning processes as well as intergovern- mental warning message exchange in the Indian Ocean region. The Distant Early Warning System (DEWS) Project - aims at strengthening the early warning capacities by building interoperable tsunami early warning systems. Of special importance is the distant communication of warning information among warning centres. The project complements the German Indonesian Tsunami Early Warning System-Project (GITEWS). DEWS provides a Reference Model for interoperable tsunami early warning systems and applies the Service Oriented Architecture (SOA) paradigm. Based on an Enterprise Service Bus (ESB) all resources (e.g. sensors) can be decoupled from proprietary access: •A Service Layer provides uniform access to resources •An Orchestration Layer to access workflows and processes for the early warning phase. The ESB concept is used in both the upstream and downstream part of DEWS. Motivation GRASS GIS is a valuable tool for complex data manipulation. It is often applied in the backend of a project to generate spatial data resources to be used with other software tools. The DEWS project requires siginifacnt amounts of spatial data resources. To establish reasonable production capacities, it is vital to have specifiv GRASS versions easily available on various platforms, preferably on different operating systems. Approach GRASS developers can use integrated development environment (IDE) for efficent code development and software deployment. For this, the example of Eclipse in conjunction with the C-Development Tool (CDT) is used. It can be used to show how to access, manage and compile the GRASS sourcecode independently from the platform via the IDE. Larger Picture For developers the short-term benefits of this approach are extended options for collaborative development, code refactoring and the wrapping of the traditional building-chain in ant-Code. The Potential In the last years, IDEs have increasingly become the standard approach to code development. Most programmers have become used to them and take them for granted. To lower the curb to join the active GRASS developer community and to extend and rejuvenate the community in the long term, IDE- based platform-independent GRASS-development will play a prominent role in the future. This will help to future-safe GRASS GIS as a community-driven FOSS GIS project. as represneetd in the Eclipse IDE. The frame in the middle shhows the ant-Code fragemnt which is used to execute the gRASS build process. The front shows ware as it was called up right from the IDE.