Pert- program evaluation and review technique
•Als PPTX, PDF herunterladen•
11 gefällt mir•8,112 views

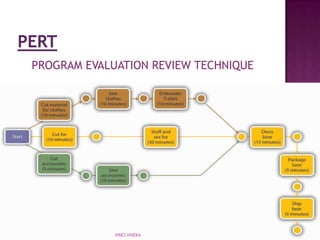
The Program Evaluation and Review Technique (PERT) is a statistical tool used in project management to analyze the tasks involved in completing a project. It involves defining tasks, organizing them into a network diagram, and estimating activity times and dependencies. This allows project managers to compute the minimum time needed to complete the project by identifying the critical path. PERT was developed for the U.S. Navy in the 1950s and facilitates decision making by making the dependencies and critical path of a project visible.

Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (20)
Andere mochten auch
Andere mochten auch (20)
Ähnlich wie Pert- program evaluation and review technique
Ähnlich wie Pert- program evaluation and review technique (20)
Mehr von Vinci Viveka
Mehr von Vinci Viveka (15)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
Pert- program evaluation and review technique
- 1. PROGRAM EVALUATION REVIEW TECHNIQUE VINCI VIVEKA
- 2. VINCI VIVEKA •A statistical tool, used in project management • It is designed to analyze and represent the tasks involved in completing a given project. •A decision making tool designed to save time in achieving end objectives. •It is one of the techniques of scientific management. •It was developed for the U.S. Navy Special Projects Office in 1957 to support the U.S. Navy's Polaris nuclear submarine project
- 3. PERT PERT chart is a tool that facilitates decision making. PERT is a method to analyze the involved tasks in completing a given project, especially the time needed to complete each task and to identify the minimum time needed to complete the total project. PERT is valuable to manage where multiple tasks are occurring simultaneously to reduce idleness. For this it takes into consideration three factors: 1. Time 2. Resources 3. Technical Performance Specifications. VINCI VIVEKA
- 4. TERMINOLOGY PERT Event: a point that marks the start or completion of one or more activities. It consumes no time and uses no resources. When it marks the completion of one or more tasks, it is not “reached” (does not occur) until all of the activities leading to that event have been completed.eg- start and finish* Predecessor Event: an event that immediately precedes some other event without any other events intervening. An event can have multiple predecessor events and can be the predecessor of multiple events. Eg: A and b are predecessor of C* Successor Event: an event that immediately follows some other event without any other intervening events. An event can have multiple successor events and can be the successor of multiple events.eg: D is the successor of C*. *(refer Gantt Diagram) VINCI VIVEKA
- 5. Optimistic Time (O): the minimum possible time required to accomplish a task, assuming everything proceeds better than is normally expected Pessimistic Time (P): the maximum possible time required to accomplish a task, assuming everything goes wrong (but excluding major catastrophes). Most Likely Time (M): the best estimate of the time required to accomplish a task, assuming everything proceeds as normal. Expected Time (TE): the best estimate of the time required to accomplish a task, accounting for the fact that things don't always proceed as normal (the implication being that the expected time is the average time the task would require if the task were repeated on a number of occasions over an extended period of time). TE = (O + 4M + P) ÷ 6 VINCI VIVEKA
- 6. PERT Activity: the actual performance of a task which consumes time and requires resources (such as labor, materials, space, machinery). It can be understood as representing the time, effort, and resources required to move from one event to another. A PERT activity cannot be performed until the predecessor event has occurred. Eg: A,B,C,D* Float or Slack is a measure of the excess time and resources available to complete a task. It is the amount of time that a project task can be delayed without causing a delay in any subsequent tasks (free float) or the whole project (total float). Positive slack would indicate ahead of schedule; negative slack would indicate behind schedule; and zero slack would indicate on schedule. Critical Path: the longest possible continuous pathway taken from the initial event to the terminal event. It determines the total calendar time required for the project; and, therefore, any time delays along the critical path will delay the reaching of the terminal event by at least the same amount. VINCI VIVEKA
- 7. Activity Predecessor Time Estimates Te O M P A - 2 8 6 4.00 B - 3 5 9 5.33 C A,B 4 5 7 5.17 D C 4 6 10 6.13 TE = (O + 4M + P) ÷ 6 VINCI VIVEKA
- 8. Gantt Chart ( According to the table in previous chart) Activity On Node (AON) Diagram VINCI VIVEKA
- 9. EARLY DURATION EARLY START FINISH A LATE SLACK LATE START FINISH VINCI VIVEKA
- 10. In order to determine these following are the steps- EARLY FINISH [ EF ] Formula for EF= ES + Duration. Duration can be taken from the table it is represented by Te For the first activity i.e. START Early Start [ ES] =0, VINCI VIVEKA As start is a pert event its duration is zero. Therefore, for START ES=0 Duration =0 ; EF= ES + Duration => EF=0 EF of the predecessor event becomes ES of its successor. Therefore, for A ES=0 Duration=4, EF=4 For B,( as A&B both have same Predecessor i.e. START hence B---- ES=0 Duration= 5.33 EF=5.33 For C ( as A&B both are C predecessor hence we take the one with higher value) ES=5.33 Duration=5.17 EF=10.5
- 11. For D, ES= 10.5 Duration=6.13 EF=16.63 For FINISH [as FINISH is a pert event its duration is zero] ES=16.63 Duration=0 EF=16.63 LATE START [ LS ] Formula LS=LF – DURATION In this we start with FINISH, as it is the last activity. LATE FINISH [LF ] of FINISH = its EF. Therefore, LF=EF=16.63 Duration= 0 LS=LF- Duration , Hence LS=16.63 For D, [ LS of successor event becomes LF for its predecessor event ] LF=16.63 Duration=6.13 LS=10.5 For C, LF=10.5 Duration=5.17 LS=5.33 For B, LF=5.33 Duration=5.33 LS= 0 VINCI VIVEKA
- 12. For A, [ as C is also its successor ] LF=5.33 Duration=4 LS=1.33 For START [as A&B both are successor but we take here one with the lower value ] LF=1.33 Duration =0 LS=1.33 VINCI VIVEKA SLACK To determine the critical path we have to find whether any activity has a slack. Activity on the critical path has slack zero. Formula SLACK=LF-EF or SLACK= LS-ES For START For C LS=1.33 ES=0 SLACK=1.33 LS=5.33 ES=5.33 SLACK=0 For A For D LS=1.33 ES=0 SLACK=1.33 LS= 10.5 ES=10.5 SLACK=0 For B For FINISH LS=5.33 ES=0 SLACK=5.33 LS=1.33 ES=0 SLACK=1.33
- 13. ES=0 DUR=0 EF=0 ES=0 DUR=4 EF=4 START A LS=1.33 SLACK=1.33 LF=1.33 LS=0 SLACK=1.33 LF=5.33 ES=0 DUR=5.33 EF=5.33 ES=5.33 DUR=5.17 EF=10.5 B C LS=0 SLACK=5.33 LF=5.33 LS=5.33 SLACK=0 LF=10.5 ES=10.5 DUR=6.13 EF=16.33 ES=16.63 DUR=0 EF=16.63 D FINISH LS=10.5 SLACK=0 LF=16.63 LS=16.63 SLACK=1.33 LF=16.63 VINCI VIVEKA
- 14. CRITICAL PATH It is the longest continous -path way. There can be more than one critical path or the path can change. In the drawn Gantt diagram there are two alternatives to reach FINISH and adding there SLACK timing- START+A+C+D+FINISH=3.99 START+B+C+D+FINISH=7.99 Hence , the path START+B+C+D+FINISH is the longest it is the critical path, shown in the diagram in the next slide. VINCI VIVEKA
- 15. VINCI VIVEKA CRITICAL PATH [ in red ink ]
- 16. •PERT chart explicitly defines and makes visible dependencies (precedence relationships) between the work breakdown structure (commonly WBS) elements •PERT facilitates identification of the critical path and makes this visible •PERT facilitates identification of early start, late start, and slack for each activity •PERT provides for potentially reduced project duration due to better understanding of dependencies leading to improved overlapping of activities and tasks where feasible. •The large amount of project data can be organized & presented in diagram for use in decision making. VINCI VIVEKA
- 17. DISADVANTAGES: •There can be potentially hundreds or thousands of activities and individual dependency relationships •PERT is not easily scalable for smaller projects •The network charts tend to be large and unwieldy requiring several pages to print and requiring special size paper •The lack of a timeframe on most PERT/CPM charts makes it harder to show status although colours can help (e.g., specific colour for completed nodes) •When the PERT/CPM charts become unwieldy, they are no longer used to manage the project. VINCI VIVEKA
- 18. VINCI VIVEKA Prepared by: VINCI VIVEKA M.ED SCHOLAR [2012-2013] ST. XAVIER’S COLLEGE OF EDUCATION, PATNA. vivekavinci@gmail.com REFERENCE: http://en.wikipedia.org/wiki/Program_Evaluation_and_Review_Technique