Redes de comunicação industriais Profibus e Ethernet
•
16 gefällt mir•4,038 views

O documento discute os protocolos Profibus e Ethernet, redes industriais de comunicação e controle, incluindo os barramentos de campo AS-i e Bitbus. Também aborda o uso da fibra ótica em redes industriais, destacando suas vantagens como imunidade a ruído e maior velocidade, mas também seus desafios como atenuação e custo mais elevado.

Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (20)
Andere mochten auch
Andere mochten auch (17)
Ähnlich wie Redes de comunicação industriais Profibus e Ethernet
Ähnlich wie Redes de comunicação industriais Profibus e Ethernet (20)
Mehr von Jim Naturesa
Mehr von Jim Naturesa (20)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
Redes de comunicação industriais Profibus e Ethernet
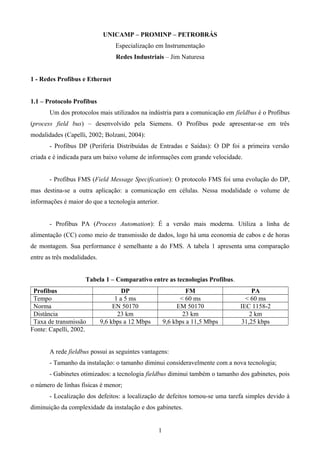
- 1. UNICAMP – PROMINP – PETROBRÁS Especialização em Instrumentação Redes Industriais – Jim Naturesa 1 - Redes Profibus e Ethernet 1.1 – Protocolo Profibus Um dos protocolos mais utilizados na indústria para a comunicação em fieldbus é o Profibus (process field bus) – desenvolvido pela Siemens. O Profibus pode apresentar-se em três modalidades (Capelli, 2002; Bolzani, 2004): - Profibus DP (Periferia Distribuídas de Entradas e Saídas): O DP foi a primeira versão criada e é indicada para um baixo volume de informações com grande velocidade. - Profibus FMS (Field Message Specification): O protocolo FMS foi uma evolução do DP, mas destina-se a outra aplicação: a comunicação em células. Nessa modalidade o volume de informações é maior do que a tecnologia anterior. - Profibus PA (Process Automation): É a versão mais moderna. Utiliza a linha de alimentação (CC) como meio de transmissão de dados, logo há uma economia de cabos e de horas de montagem. Sua performance é semelhante a do FMS. A tabela 1 apresenta uma comparação entre as três modalidades. Tabela 1 – Comparativo entre as tecnologias Profibus. Profibus DP FM PA Tempo 1 a 5 ms < 60 ms < 60 ms Norma EN 50170 EM 50170 IEC 1158-2 Distância 23 km 23 km 2 km Taxa de transmissão 9,6 kbps a 12 Mbps 9,6 kbps a 11,5 Mbps 31,25 kbps Fonte: Capelli, 2002. A rede fieldbus possui as seguintes vantagens: - Tamanho da instalação: o tamanho diminui consideravelmente com a nova tecnologia; - Gabinetes otimizados: a tecnologia fieldbus diminui também o tamanho dos gabinetes, pois o número de linhas físicas é menor; - Localização dos defeitos: a localização de defeitos tornou-se uma tarefa simples devido à diminuição da complexidade da instalação e dos gabinetes. 1
- 2. - Custo final: o custo final da obra diminui com a nova rede. O meio físico que interliga os componentes da rede pode ser elétrico ou óptico. Será discutido apenas o meio elétrico. O meio elétrico possui fios condutores, normalmente blindados para não permitir a entrada de ruídos. O meio elétrico pode ser dividido em single-ended ou diferencial. O sistema single-ended é o mais antigo. Os sistemas RS-232 e o RS-423 são os principais exemplos dessa tecnologia. A figura 1 mostra como funciona o RS-232; o pino “0” (zero volt) serve como referência. O sinal -15 V corresponde ao nível lógico “1”, enquanto que o sinal +15 V ao nível lógico “0”. A distância máxima dessa rede não ultrapassa 20 metros de comprimento, sendo inadequada para o ambiente industrial (Capelli, 2002). Figura 1 – Sistemas RS – 232 e RS – 485. Fonte: Capelli, 2002. O sistema diferencial é o mais confiável. Ao contrário da tecnologia anterior, sua transmissão baseia-se na polaridade do sinal. Analisando a figura 1, percebe-se que a amplitude do sinal não é crítica e, dependendo da polarização, temos nível lógico “1” ou “0”. Como o nível é definido pela polaridade, mesmo que o ruído interfira na linha, ele não prejudicará a transmissão de dados. Os principais exemplos de transmissão diferencial são os sistemas RS-422 e a RS-485. A tabela 2 apresenta as principais características das tecnologias apresentadas. 2
- 3. Tabela 2 – Principais sistemas. Especificações RS 232 RS 423 RS 422 RS 485 Modo Single-ended Single-ended Diferencial Diferencial Número de receptores 1 10 10 32 Velocidade máxima 20 kb/s 100 kb/s 10 Mb/s 10 Mb/s Tensão máxima de saída +/- 25 V +/- 6 V -0,25 V a + 6 V -7 V a + 12 V Sensibilidade +/- 3 V +/- 200 mV +/- 200 mV +/- 200 mV Resistência de entrada 3 kΩ a 7kΩ Mínimo 4kΩ Mínimo 4kΩ >= 12 kΩ Fonte: Capelli, 2002 com adaptações. No caso do Profibus, seu meio físico pode ser elétrico ou óptico. Se for elétrico, deveremos utilizar o RS – 485. A topologia básica de uma rede Profibus é apresentada na figura 2; também pode-se encontrar a configuração token-pass – veja figura 3. Pela análise da figura 3 observa-se que há dois computadores para a função de PC manager; ou seja, para uma determinada função o controle pode ser exercido pelo PC “A”, em outra o PC “B” assume o comando. Essa técnica aumenta a velocidade de comunicação, pois cada PC pode realizar tarefas dedicadas a sua programação. Essa característica está disponível para o Profibus FMS e PA. Figura 2 – Sistema básico Profibus e Ethernet. Fonte: Capelli, 2002. 3
- 4. Figura 3 – Configuração token-pass. Fonte: Capelli, 2002. 1.2 – Industrial Ethernet A Ethernet é a mais famosa rede de comunicação interna. O Profibus é um bom protocolo de informações até o nível das células – veja figura 3. Embora o Profibus possa tratar do gerenciamento, a Ethernet é mais indicada para isso. Perceba que existe uma placa, denominada Gate Away”, responsável pela conexão entre os sistemas. A velocidade típica da Industrial Ethernet é de 10 Mbps, mas está disponível a versão Fast Ethernet, de 100 Mbps. Quanto à rede física, existem três possibilidades: par trançado e blindado, cabo coaxial de 75 Ω ou fibra óptica. 2 – Redes industriais de comunicação e de controle 2.1 – Introdução Em uma indústria moderna coexistem muitos dispositivos e equipamentos destinados ao controle, por exemplo, os controladores lógicos programáveis, os Sistemas Digitais de Controle Distribuído (SDCD), computadores de gerência, de projetos, sensores etc. O desenvolvimento das redes industriais visa unir todos estes dispositivos com o objetivo de aumentar o rendimento e diminuir os custos. As principais vantagens são: 1) Visualização e supervisão do processo de produção; 2) Aquisição de dados do processo mais eficiente e rápida; 3) Melhora do rendimento do processo; 4) Aumento do intercâmbio de dados de processo entre sensores e departamentos vizinhos e 5) Programação remota, sem necessidade de acesso físico a dispositivos de chão de fábrica. Algumas redes trabalham baseadas em transmissão de bits, em nível mais baixo do que as demais, denominadas de Redes de Sensores, tais como a Serplex, a ASI e a Interbus. Outras, em nível intermediário - visando dispositivos de campo, trabalham transmitindo bytes, são chamadas de 4
- 5. Device bus, Device net, SDS, Profibus DP, LONworks e Interbus-S. Há redes que trabalham em nível mais elevado, com uma variedade de informações maiores - derivadas de instrumentos mais complexos, transmitindo blocos de informações, denominadas de fieldbusses, como a IEC/ISA SP- 50, da qual derivou a Fieldbuss Foundation, a Profibus PA e o protocolo Hart (Bega, 2007). Basicamente os níveis funcionais nas redes são: 1) Nível de administração. Este é o nível mais alto sendo responsável pela integração dos níveis mais baixo. O tipo de rede empregado é a Rede de Área Local (LAN – Local Area Network) e a Rede de Área Ampliada (WAN – Wide Area Network). 2) Nível de controle. Esse nível é responsável por agrupar e dirigir as áreas de produção, normalmente utiliza-se a rede LAN. 3) Nível de campo e processo. Esse nível integra pequenas automações, CLPs, multiplexadores, controladores PIC etc. Utilizam barramentos de campo. 4) Níveis de entradas/saídas. É o nível mais próximo do processo. É basicamente nesse nível que são encontrados os sensores, transmissores e atuadores encarregados de interfacear o processo de produção. 2.2 - Redes LAN Industriais Os padrões e normas mais conhecidos são: MAP (Manufactures Automation Protocol) – não pode ser considerada um barramento de campo, mas possui pontes e terminais para acessa-los; Ethernet – as velocidade vão desde 10 a 100 Mbytes da Fast-Ethernet. 2.3 – Barramentos de Campo O barramento de campo constitui o nível mais simples e próximo do processo; baseia-se em processadores simples e utiliza um protocolo mínimo para se comunicar. Os barramentos de campo mais modernos permitem a comunicação com as redes de nível superior e a possibilidade de distribuir o controle entre os elementos da rede (Bega, 2007). 2.3.1 – Rede As-i A AS-i (Actuator Sensor Interface) é uma rede simples para a conexão direta a sensores e atuadores discretos, do nível mais baixo em automação (nível de entrada e saída) até a comunicação com redes de nível mais alto e dispositivos de controle. Substitui painéis e cablagem, reduzindo o custo da instalação e manutenção e o tempo de projeto. A AS-i define os parâmetros para uma conexão via cabo, levando sinal e alimentação a sensores e dispositivos não inteligentes, operando por estações mestre-escravo. O CLP ou o computador funciona como estação-mestra. Cada escravo 5
- 6. As-i pode comandar oito elementos discretos, sendo quatro de entrada e quatro de saída. A configuração máxima é de 31 escravos, ou seja, 248 elementos discretos de automação. 2.3.2 – Rede Bitbus A Bitbus é uma rede de comunicação em série para aplicações industriais, tipo barramento de campo. Baseia-se numa linha compartilhada tipo RS-485 e está otimizada para a transmissão em tempo real de pequenas mensagens. Possui sempre uma estação mestra e uma ou mais escravas, sendo que cada escrava tem o seu próprio endereço – facilitando sua identificação na rede. A mestra controla a rede, selecionando a escrava com quem vai se comunicar. A rede Bitbus usa um cabo contendo um ou dois pares de fios torcidos e blindados. A rede Bitbus pode ser configurada das seguintes maneiras: 1) Mestre-escravo; 2) Em árvores com repetidoras para distâncias maiores; 3) Árvore multinível. A rede Bitbus é composta de elementos básicos denominados nós. Um nó é qualquer dispositivo que contenha ao menos uma interface com a rede, podendo ser: 1) Mestre – em cada nível só pode haver um mestre. Ele controla o acesso a rede mediante um protocolo de comunicação do tipo pergunta-resposta; 2) Escravo – é um nó controlado pelo mestre, que só transmite quando o mestre o chama; 3) Repetidor - se encarrega de retransmitir os sinais de dados da rede; 4) Expansão de entradas e saídas – é qualquer dispositivo de entrada ou saída que se conecta a rede ou a um escravo. 2.4 – A utilização da fibra ótica em redes industriais. O ambiente industrial caracteriza-se por elevados níveis de ruído elétrico e eletromagnético, que podem afetar a comunicação entre os diversos dispositivos que compõem o sistema de automação. As fibras óticas podem ser usadas como ferramentas para se atenuar essa interferência. Os sistemas de comunicação via fibra ótica usam impulsos luminosos para enviar sinais, que resulta em uma isolação galvânica entre os equipamentos conectados nos extremos da fibra. As principais vantagens da fibra são (Bolzani, 2004; Bega, 2007): a) proporcionar imunidade a ruído magnético, elétrico e eletromagnético; b) imunidade a transitórios de tensão elétrica; c) maior velocidade de transmissão em comparação a cabos blindados ou coaxiais; d) grande largura de banda. Entre os principais problemas, destacam-se: 6
- 7. e) uma atenuação inerente ao material empregado em sua fabricação; f) alto custo; g) instalação e manutenção especializada. Referências Bega, E. (Organizador). Instrumentação Industrial. Editora Interciência. 2007. Bolzani, C. Residências Inteligentes – Domótica, Redes Domésticas e Automação Residencial. Editora Livraria da Física. 2004. Capelli, A. Mecatrônica Industrial. Editora Saber. 2002. 7