Wayne Imaino, Distinguished Research Staff Member at IBM Almaden Research Center, currently working to develop machine intelligence, made this presentation as part of the Cognitive Systems Institute Speaker Series on Jan 28, 2016.
"Kate, a Platform for Machine Intelligence" by Wayne Imaino, IBM Research
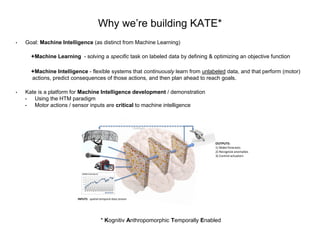
1. Why we’re building KATE*
• Goal: Machine Intelligence (as distinct from Machine Learning)
Machine Learning - solving a specific task on labeled data by defining & optimizing an objective function
Machine Intelligence - flexible systems that continuously learn from unlabeled data, and that perform (motor)
actions, predict consequences of those actions, and then plan ahead to reach goals.
• Kate is a platform for Machine Intelligence development / demonstration
• Using the HTM paradigm
• Motor actions / sensor inputs are critical to machine intelligence
* Kognitiv Anthropomorphic Temporally Enabled
INPUTS: spatial-temporal data stream
OUTPUTS:
1) Make forecasts
2) Recognize anomalies
3) Control actuators
Feedback
2. Learning Bipedal Locomotion
• Kate follows biological architecture / control structure
• Central pattern generator - low level control
• Assisted by cerebellum for coordination
• Muscle-like actuation / feedback
• Back-drivable motors
• Spring extended actuators
• Sensor-motor sequences should predict an expectation
• Given motor effort what sensor input does HTM expect
• e.g., after a step, HTM will expect foot pressure
• Given sensor input what motor action should HTM initiate
• e.g., if torso is pitched forward, HTM will initiate a leg
swing
• Temporal sequences encode context
Slow walk
5. Kate: Strategic Direction
• Future conduit for IBM’s cloud-based cognitive services
• Ground-up integration
• Watson services
• Speech recognition / generation
• Parts of speech parsing
• Key parts of Machine Intelligence based HTM
• Learning required : impossible to account for all contexts
• Contextual control
• Learning through demonstration
• SDR formation of objects / actions
Kate walking in Austin Lab
6. • Kate is an open robotic platform for IBM’s cognitive services
• IBM’s value is in the services provided
• Existing Watson services
• Speech recognition / generation
• Parts of speech parsing
• New services based on HTM
• Low cost for wide deployability
• Easily fabricated
• 3D printed parts, commonly available parts
Kate: Collaborative Platform for Machine Intelligence
Early concept
Student version
iPad
Motor
controller
7. Kate: Bipedal Locomotion and HTM
• Traditional control metrics not applicable for locomotion
• Control error, speed, bandwidth
• (More applicable to robot arms, where placement is important)
• Traditional control - kinematic path design / following is brittle
• Works well only for well-defined environments
• Metric in walking is NOT FALLING
• Given any environment
• Online learning is vital - key demonstration of HTM
• Learning / recognition accuracy
• Capacity
• HTM sequence memory will learn / recognize all contexts
• For which Kate is exposed
• HTM will recognize contexts and modify control actions
• Through central pattern generator (Galil controller)
• Walking is a microcosm of intelligence
without HTM
14. References
• . J. Hawkins, S. Blakeslee. On Intelligence. Henry Holt and Company, New York, 2004.
•. Numenta white paper, “HIERARCHICAL TEMPORAL MEMORY including
HTM Cortical Learning Algorithms