A Model-Based Development Process for Dependable Robots
•
0 gefällt mir•670 views

ROBOMEC 2012 Panel.

Empfohlen
Weitere ähnliche Inhalte
Ähnlich wie A Model-Based Development Process for Dependable Robots
Ähnlich wie A Model-Based Development Process for Dependable Robots (20)
Kürzlich hochgeladen
Kürzlich hochgeladen (10)
A Model-Based Development Process for Dependable Robots
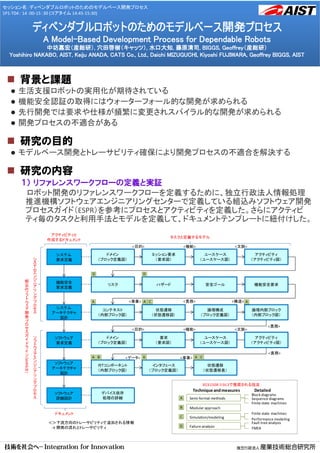
- 1. セッション名:ディペンダブルロボットのためのモデルベース開発プロセス 1P1‐T04: 14:00‐15:30 (コアタイム 14:45‐15:30) 背景と課題 生活支援ロボットの実用化が期待されている 機能安全認証の取得にはウォーターフォール的な開発が求められる 機能安全認証の取得にはウォ タ フォ ル的な開発が求められる 先行開発では要求や仕様が頻繁に変更されスパイラル的な開発が求められる 開発プロセスの不適合がある 研究の目的 モデルベース開発とトレーサビリティ確保により開発プロセスの不適合を解決する モデルベ ス開発とトレ サビリティ確保により開発プロセスの不適合を解決する 研究の内容 1) リファレンスワークフローの定義と実証 ロボット開発のリファレンスワークフローを定義するために、独立行政法人情報処理 推進機構ソフトウェアエンジニアリングセンターで定義している組込みソフトウェア開発 プロセスガイド(ESPR)を参考にプロセスとアクティビティを定義した。さらにアクティビ ティ毎のタスクと利用手法とモデルを定義して、ドキュメントテンプレートに紐付けした。 アクティビティと タスクと定義するモデル 作成するドキュメント <目的> <機能> <文脈> システム ドメイン ミッション要求 ユースケース アクティビティ シ 要求定義 (ブロック定義図) (要求図) (ユースケース図) (アクティビティ図) ス テ ム エ D D ン ジ 組 ニ 機能安全 込 ア リスク ハザード 安全ゴール 機能安全要求 要求定義 み リ ソ ン フ グプ トウ <事象> A C <責務> <構造> A A ェ ロ ア セ システム コンテキスト 状態遷移 論理構成 論理内部ブロック 開 ス アーキテクチャ 発 (内部ブロック図) (状態遷移図) (ブロック定義図) (内部ブロック図) 設計 プ ロ セ <責務> ス <目的> <機能> <文脈> ガ イ ソ ソフトウェア ドメイン 要求 ユースケース アクティビティ ド フ (ブロック定義図) (要求図) (ユースケース図) (アクティビティ図) ト 要求定義 ライ ウ ェ ン ア 責務 <責務> (E エ A B <データ> A <事象> A C ン ソフトウェア S ジ RTコンポーネント インタフェース 状態遷移 P ニ アーキテクチャ R ア (内部ブロック図) (ブロック定義図) (状態遷移表) ) 設計 リ ン グ IEC61508‐3 SIL3で推奨される技法 プ ロ Technique and measures Detailed セ ソフトウェア デバイス依存 Block diagrams ス 詳細設計 処理の詳細 A Semi‐formal methods Sequence diagrams Finite state machines Fi it t t hi B Modular approach ドキュメント Finite state machines C Simulation/modeling Performance modeling <>下流方向のトレーサビリティで追加される情報 Fault tree analysis → 開発の流れとトレーサビリテ ィ D Failure analysis FMEA
- 2. 研究の内容 2) モデルベースによる電動車椅子ロボットの開発 ・SysML でメカ・エレキ・ソフトをモデリングして安全分析 キ を デ グ 安全分析 ・制御アプリは IEC61508 認証のRTMSafety 上に構築 ・安全管理部は外界の状況から安全レベルを決定する SafetyMonitor に実装。 ・SafetyMonitor は ZIPC‐RT で生成したコードを採用 3) トレーサビリティ活用法の考案 ・プロセス/アクティビティのドキュメントからモデルへの トレーサビリティをTERASツールで作成 開発した電動車椅子ロボット ・仕様変更の影響解析を実現 例) 「遠くに障害物を発見したとき」の仕様の影響範囲を検索 http://www.teras.or.jp/ トレーサビリティエディタ ソフトウェアアーキテクチャ設計書 ソフトウェア要求図 コンポーネント図 状態遷移表 ※検索結果は選択表示かハイライトされる 影響範囲の検索結果からモデル要素を辿り影響を分析 要求とテスト結果のトレーサビリティ(カバレッジ)を確認 http://www.zipc.com/special/zipc_rt/ 結果と考察 以下の貢献によりプロセス不適合の軽減に 効果があることがわかった。 ・リファレンスワークフロー 全体と部分の関係を踏まえて設計可能 ・トレーサビリティ アーキテクチャの説明力が向上 ・影響解析 走行ログからセルカバレッジを表示 ※通過したセルが着色される 仕様/設計変更の影響が把握可能