Unlocking the Power of ChatGPT and AI in Testing - A Real-World Look, present...
Huong dan-viet-chuong-trinh-thuc-hanh
1. N I DUNG TH C HÀNH ROBOT
Các bư c c n th c hi n trong th c hành vi t chương trình ñi u khi n robot:
1. Thi t l p các thông s trong ph n Cell manager cho phù h p v i ng d ng.
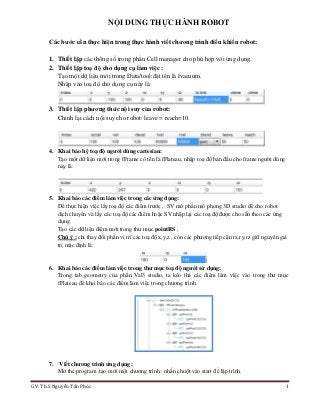
2. Thi t l p to ñ cho d ng c làm vi c :
T o m t d li u m i trong Data/tool:ñ t tên là fvacuum.
Nh p vào to ñ cho d ng c này là:
3. Thi t l p phương th c n i suy c a robot:
Ch nh l i cách n i suy cho robot: leave = reach=10.
4. Khai báo h to ñ ngư i dùng cartesian:
T o m t d li u m i trong fFrame có tên là fFlateau, nh p to ñ ban ñ u cho frame ngư i dùng
này là:
5. Khai báo các ñi m làm vi c trong các ng d ng:
ð th c hi n vi c l y to ñ các ñi m trư c , SV m ph n mô ph ng 3D studio ñ cho robot
d ch chuy n và l y các to ñ các ñi m ho c SV nh p l i các to ñ ñư c cho s n theo các ng
d ng.
T o các d li u ñi m m i trong thư m c pointRS ,
Chú ý : ch thay ñ i ph n v trí các to ñ x,y,z , còn các phương ti p c n rx,ry,rz gi nguyên giá
tr m c ñ nh là:
6. Khai báo các ñi m làm vi c trong thư m c to ñ ngư i s d ng:
Trong tab geometry c a ph n Val3 studio, ta kéo th các ñi m làm vi c vào trong thư m c
fFlateau ñ khai báo các ñi m làm vi c trong chương trình.
7. Vi t chương trình ng d ng :
M th program ,t o m i m t chương trình : nh n chu t vào start ñ l p trình.
GV: Th.S Nguyễn Tấn Phúc 1
2. CÁC NG D NG :
1.Vi t chương trình ñ u tiên di chuy n ñ n m t ñi m t v trí ban ñ u c a robot :
Movej(pPot1, tVacuum, mnomSpeed).
pPot1: toạ độ cartesian của robot.
Tvacuum: tool sử dụng.
Mnormspeed: Kiểu di chuyển đến điểm đó khi leave=reach <>0.
di chuy n n i suy theo m t ñư ng cong t i thi u hoá th i gian d ch chuy n.
Nh p vào m t ñi m ví d :
Vi t vào tab program n i dung code :
ð ki m tra chính xác l i cú pháp chương trình ch n: tool/check syntax.
Qua ph n CCS8 và Val3 studio ñ th c thi chương trình robot.
Lưu ý v vi c restart b controller ñ ch y l i chương trình.
2.VI T CHƯƠNG TRÌNH CH Y THEO BIÊN D NG HÌNH CH NH T :
S d ng l nh di chuy n robot theo ñư ng th ng:
Movel(pPot1, tVacuum, mlinear).
pPot1: toạ độ cartesian của robot.
Tvacuum: tool sử dụng.
mlinear: kiểu di chuyển đến điểm đó khi leave=reach =0.
Toạ độ các điểm:
pPot1: x=0; y=0 ; z=5;
pPot2: x=0 ; y =100 ; z=5;
pPot3: x= -240 ; y=100 ; z=5;
pPot4: x= -240 ; y=0 ; z=5;
GV: Th.S Nguyễn Tấn Phúc 2
3. begin
//chuong trinh bam theo hinh chu nhat..
movel(pPot1,Fvacuum,mLinear) : di chuyen theo duong thang..
waitEndMove()
movel(pPot2,Fvacuum,mNomSpeed)
waitEndMove()
movel(pPot3,Fvacuum,mNomSpeed)
waitEndMove()
movel(pPot4,Fvacuum,mNomSpeed)
waitEndMove()
movel(pPot1,Fvacuum,mLinear)
waitEndMove()
end
3. VI T CHƯƠNG TRÌNH CH Y HÌNH TRÒN :
S d ng l nh d ch chuy n robot theo ñư ng cong v i bán kính c ñ nh.
Movec(p_inter,p_des ,fvacuum, mnorspeed).
P_inter: ñi m trung gian robot qua.
P_des: ñi m cu i c a robot.
fVacuum: to ñ d ng c robot.
Mnorspeed: Ki u di chuy n robot leave=reach<>0.
To ñ các ñi m:
pPot1 : x=-100 ; y=0; z=-30.
pPot2: x= 0; y=-100; z=-30.
pPot3: x= 100; y=0; z=-30.
pPot4: x= 0; y=100; z=-30.
Code chương trình CUNGTRON_KIN:
begin
//chuong trinh bam theo hình tròn..
movej(pPot1,Fvacuum,mNomSpeed)// di chuyen den DIEM B T ð U V ...
waitEndMove()
movec(pPot2,pPot3,Fvacuum,mNomSpeed) // ve t b t ñ u ñ n ðI M TRUNG GIAN VÀ
ðI M K T THÚC...
waitEndMove()
movej(pPot3,Fvacuum,mNomSpeed) // DIEM BAT DAU VE...
waitEndMove()
movec(pPot4,pPot1,Fvacuum,mNomSpeed) // DIEM TRUNG GIAN VA KET THUC...
waitEndMove()
end.
GV: Th.S Nguyễn Tấn Phúc 3
4. 4.VI T CHƯƠNG TRÌNH G P ð T :
Begin here
Ppot2
Ppot1
Lấy chi tiết Đặt chi tiết
Yêu c u :
T c ñ khi xu ng g p s n ph m và nâng s n ph m lên tương ñ i ch m , sau ñó t c ñ di
chuy n qua ñi m ñ ñ t chi ti t nhanh hơn , sau ñó robot ñ t chi ti t xu ng và rút chi ti t lên v i t c
ñ ch m, sau ñó robot quay tr l i ñi m ban ñ u v i t c ñ nhanh .
S d ng l nh Appro:
Appro(pPot1,{x,y,x,rx,ry,rz}): ti m c n 1 ñi m theo các v trí.
To ñ các ñi m :pPot1.
pPot2:
CODE CHƯƠNG TRÌNH DICHUYEN2DIEM :
begin
movej(pPot1,fVacuum,mNomSpeed)
waitEndMove()
movej(appro(pPot1,{0,0,70,0,0,0}),fVacuum,mPick)
waitEndMove()
movel(pPot1,fVacuum,mPick)
waitEndMove()
movej(pPot2,fVacuum,mNomSpeed)
waitEndMove()
movej(appro(pPot2,{0,0,70,0,0,0}),fVacuum,mNomSpeed)
waitEndMove()
GV: Th.S Nguyễn Tấn Phúc 4
5. movel(pPot2,fVacuum,mPick)
movel(pPot1,fVacuum,mNomSpeed)
waitEndMove()
end
5. VI T M T CHƯƠNG TRÌNH CHO ROBOT DI CHUY N THEO BIÊN D NG
HÌNH CH U:
S d ng k t h p lên di chuy n theo cung tròn và l nh di chuy n theo ñư ng th ng.
K t h p 2 l nh movel và movec ñ th c hi n biên d ng ñã cho.
To ñ các ñi m :
pPot1:
pPot2:
pPot3:
pPot4:
pPot5:
Code chương trình CHUU:
movej(pPot1,Fvacuum,mNomSpeed)
waitEndMove()
movel(pPot2,Fvacuum,mNomSpeed)
waitEndMove()
movec(pPot3,pPot4,Fvacuum,mNomSpeed)
waitEndMove()
movel(pPot5,Fvacuum,mNomSpeed)
waitEndMove().
GV: Th.S Nguyễn Tấn Phúc 5