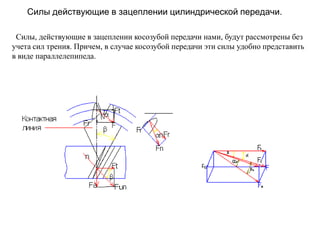
1. Силы действующие в зацеплении цилиндрической передачи.
Силы, действующие в зацеплении косозубой передачи нами, будут рассмотрены без
учета сил трения. Причем, в случае косозубой передачи эти силы удобно представить
в виде параллелепипеда.
2. Особенности расчета на контактную прочность:
1.
min
b K E
Cos b
2. Расчетная нагрузка
q
Fn
min
K K
3. 3.
пр
4.
H
n1 * n 2
n 2 n1
au
( u 1)
280
( u 1)
au
b
3
2
*
Sin
Cos в
K H T 2 Н
280
5. a ( u 1) 3
u
H
2
K H T2
ва
4. Особенности расчета косозубой цилиндрической передачи на изгиб.
1. Участие в зацеплении нескольких пар зубьев
1
1
1
= 1,88 3 , 2 (
y
K ;
) Cosβ.
Z1 Z 2
2. Контактная линия на боковой поверхности косого зуба занимает
наклонное положение.
5. 3. Коэффициент формы зуба YF в случае косозубых передач выбираются в
зависимости от эквивалентного числа зубьев Z , равного: Z Z 3
Cos
4.
F y F * y * y
5. m n
2 K F T2
bm z 2
2 K F T 2 Y F Y Y
3
2
n
Z 2 bm n F
Cos F
Cos
6. Геометрия конических передач.
Конические зубчатые пары применяются в передачах между валами, оси которых
пересекаются под некоторым углом. Межосевой угол может изменяться в широком
диапазоне значений (он может быть и острым и тупым) но наибольшее распространение
получили передачи с 90 , называемые ортогональными.
Конические зубчатые колеса выполняются с прямыми, косыми и криволинейными
(круговыми) зубьями. Здесь мы ознакомимся с геометрией прямозубой конической
передачи с углом 90
7.
8. Эквивалентная цилиндрическая передача для
упрощения прочностных расчетов.
Для упрощения прочностных расчетов обычно коническую передачу заменяют
эквивалентной ей цилиндрической передачей с размерами зубьев, равными размерам
зубьев конической передачи в среднем сечении. Принцип образования эквивалентной
цилиндрической передачи показал на рисунке. Основные параметры эквивалентной
цилиндрической передачи показал на рисунке. Основные параметры эквивалентной
цилиндрической передачи определяются через соответствующие параметры конической
передачи следующим образом:
d vm 1
Z v1
d m1
Cos 1
Z1
Cos 1
;
d vm 2
;
zv 2
u 1
2
a v ( R e 0 .5b )
u
,
uv u
dm 2
Cos 2
z2
Cos 2
2