2. Expert Knowledge in Data + Labels
Model (mostly) determined by D + L
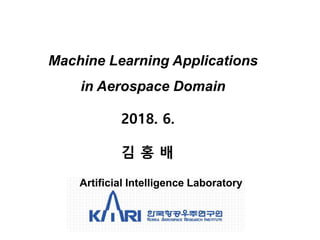
Machine Learning Technology
Spectrum
Expert Knowledge in Model Details
Data refines model parameters
Real-world systems often combine several techniques
Machine Learning Model-Based Understanding
Model-DrivenData-Driven Open Exploration
Unsupervised
Exploratory
Parameterization
Naïve Stats
Supervised
ML
Physics-Based
Modeling
Reinforcement
Learning
UQ
Assimilative
Models
4. • Detect faults and failures in complex aerospace systems
• Key challenges
Data is extremely large, noisy, and unlabelled
Most of applications exhibit temporal behaviour
Detected anomalous events typically require immediate
intervention
Applications
Anomaly Detection of Aircraft & Spacecraft
5. Applications
Properties of Telemetry Data
Multimodality : A satellite system (or each of its subsystems) has a
number of different operational modes and changes from one mode to
another over time.
Heterogenuity : variables in a satellite’s housekeeping data are
divided into two types: Continuous variables that take real values and
discrete variables that take categorical values.
High Dimensionality : Numbers of Continuous and Status Telemetry
Variables usually over 1,000 !!
Temporal Dependence
Trivial Outliers : data occasionally contain exceptionally large
abnormal values caused by errors in data conversion or
transmission.
6. Applications
Machine Learning in Planetary Exploration Rovers
• Make intelligent decisions about what data to gather and transmit.
• Develop onboard rover traverse science data analysis system
for data prioritization and opportunistic science
Constraint on Rovers : limited downlink bandwidth and communication
time delay between Earth and the rovers.(The average distance between the
two planets is 225 million km ~ 750 sec. time delay)
Autonomous Exploration
for Gathering Increased Science(AEGIS)
7. 1. Researchers are interested in identifying the existence of certain pre-
specified signals of scientific interest.
2. The second criterion is the identification of unexpected, or anomalous,
features, as these can lead to new scientific discoveries.
3. Finally researchers want to capture a description of the typical
characteristics of a region.
Three classes of data evaluation criteria
Applications
Machine Learning in Planetary Exploration Rovers
8. Architecture
• Mapping ft’n, which maps physical space to latent space
• Clustering with Gaussian mixture density
X Z
𝜇 𝑘, 𝐶 𝑘
𝜇1, 𝐶1
𝜇 𝐾, 𝐶 𝐾
Parametric modeling of Clusters,M(θ)Mapping ft’n
+
𝑤 𝐾
𝑤 𝑘
𝑤1
𝑓(𝑥)
𝜇 𝑘, 𝐶 𝑘, 𝑤 𝑘
Query(x)
𝑧1
𝑧2
Physical space Latent space
Architecture for Anomaly detection & Auto Exploration
9. Σ
Input layer
Hidden layer
(RBFs)
Output layer
W1 W2 WM
x1 x2 xn
No weight
f(x)
Each of n components of
the input vector x feeds
forward to m basis
functions whose outputs
are linearly combined with
weights w (i.e. dot product
x∙w) into the network
output f(x).
The output layer performs a simple weighted sum (i.e. w ∙x).
If the RBFN is used for regression then this output is fine.
However, if pattern classification is required, then a hard-
limiter or sigmoid function could be placed on the output
neurons to give 0/1 output values
Input data set ∶ 𝑋 = { 𝑥1 𝑥2 … 𝑥 𝑁}
Architecture
Architecture for Anomaly detection & Auto Exploration
11. Σ Σ
Category 1 Category 2
Category 1
Category 2
Architecture
Architecture for Anomaly detection & Auto Exploration
12. predict the power or fuel consumption of the spacecraft
Three years of spacecraft telemetry are released
… can you predict the fourth year ?
The ultimate goal is to automate operations and extend satellite life time,
which in turn increases the scientific return.
Applications
Machine Learning in Spacecraft Engineering
“Get the data, make a model and predict the budgets of Subsystem”
13. Mars Express Challenge
The most promising approaches are ensemble selections where different
models are merged to produce the prediction.
The ensemble of random forest, LSTM and another deep neural network
model provided a better result than each one of them separately.
Comparison of the two best models
Applications
14. Exploring Generative 3D Shapes Using Auto-encoder Networks
• Purpose : find modes of 3D objects
• Key idea : Parametric modeling of 3D objects with a fixed
dimension regardless of shape
Applications
15. Machine learning framework which predicts aerodynamic forces and velocity
and pressure fields given a three dimensional object shape and Reynolds
number input.
Applications
Learning Three-Dimensional Flow for Interactive Aerodynamic Design
16. Input layer
Gaussian
Processing
Output layer : Y
x1 x2 xn
d(x)
Input data set ∶ 𝑋 = { 𝑥1 𝑥2 … 𝑥 𝑁}
N
v(x)
N
p(x)
N
. . .
. . .
Gaussian Process (GP) regression for inferring the CFD simulation data
Applications
Learning Three-Dimensional Flow for Interactive Aerodynamic Design
Three regressors : for drag coefficient, non-dimensionalized velocity,
and pressure.
Input : Parametric modeling vector of car + Reynolds No.
y
Output data set ∶ 𝑋 = {𝑦1 𝑦2…𝑦 𝑁}
17. • Assist but respect models : Machine learning should be used to
correct/improve existing models, not to replace them.
• Cost effective & exact solution : Turbulent flow & Solid Mechanics modeling
Optimal design of Aircraft & Rocket engine
Applications
Physics- Informed Machine Learning
18. Phase I :
Training with Machine learning
Phase II :
Prediction with ML assisted
RANS Simulation
Data : features q
responses δ𝑅(ϒ,ΔΛ,Q)
q δ𝑅
Neural Nets
Query q’
Corrected
Reynold
stress δ𝑅’
Hinweis der Redaktion
탐색적 데이터 분석 기법(EDA : Exploratory Data Analysis) : 데이터를 가공하지 않고 있는 그대로 보여주는 것에 포인트를 맞춰서
분석하는 기법
확증적 데이터 분석(CDA : Confirmatory Data Analysis) : 어떤 목적을 가지고 데이터를 확보해서 분석하는 방법을 말한다
즉, 가설이나 대안 채택 여부를 결정하기 위해 사용하는 방법이다