110-mal heruntergeladen




![Vorlesung: „Elektrische Maschinen“ 10/11 Seite 7 von 108
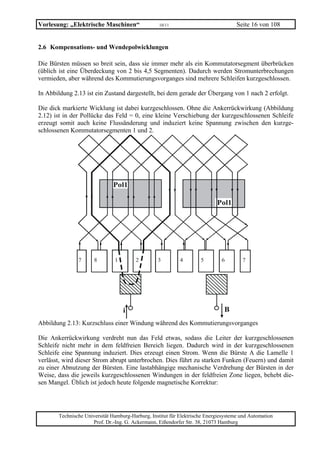
Pol 2
bp
Pol 1
lp
bp
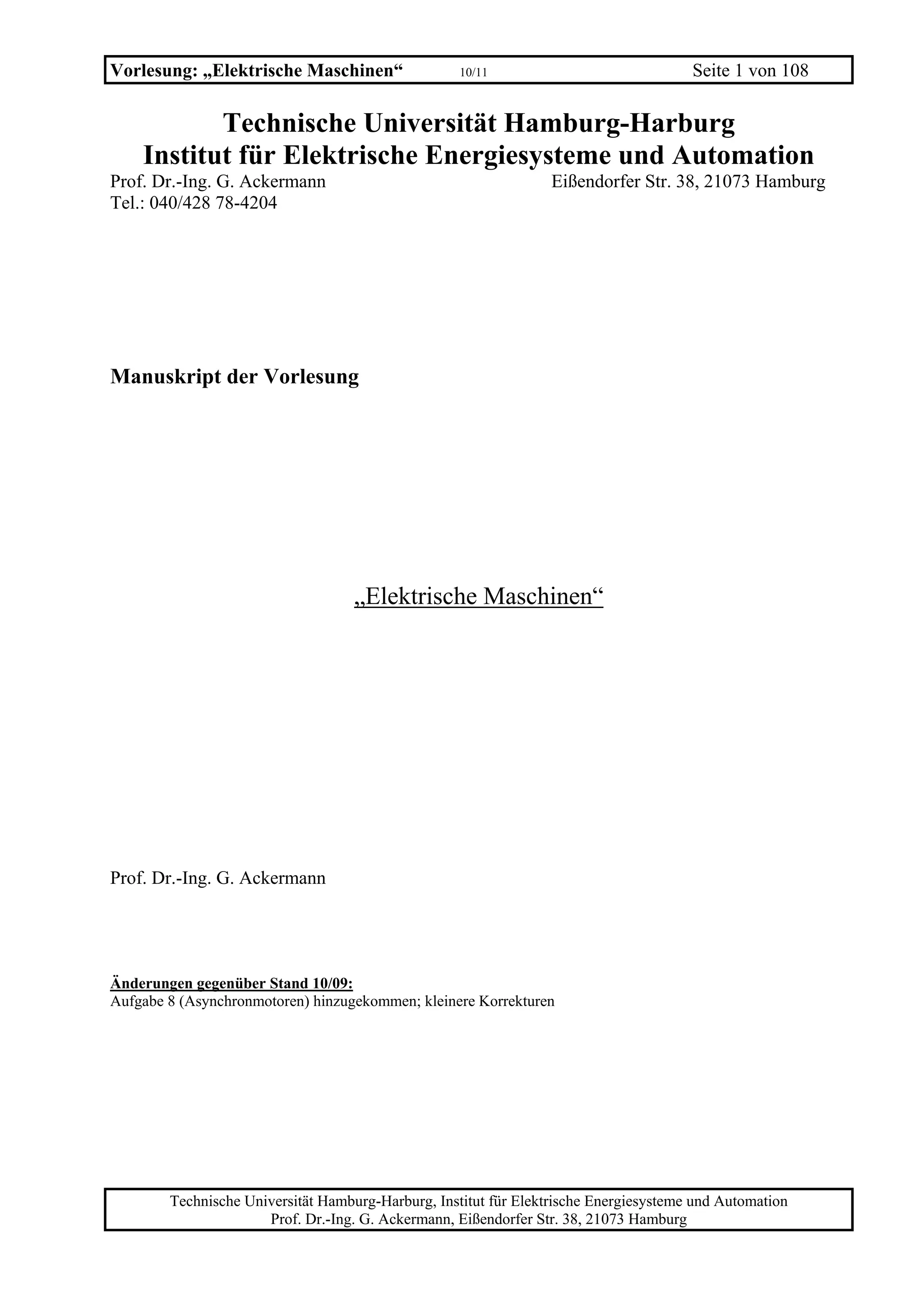
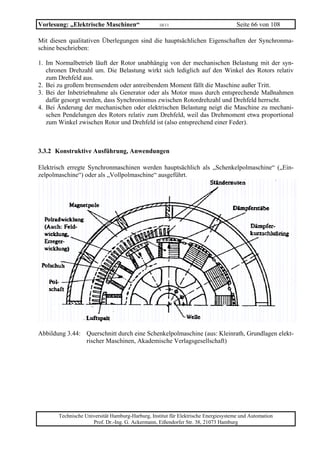
Abbildung 2. 3: Schematische Darstellung zum Verlauf des Erregerfeldes
Ne ⋅ If Θ
B = µo = µo · (2.3)
d d
Bis zu einer Flussdichte von etwa 1,5 T ist die Flussdichte proportional zu dem Erregerstrom If.
B[T]
2 Bei einer Flussdichte von etwa 1,5 T beginnt die Eisensätti-
gung, d. h. zur Vergrößerung des Flusses ist eine überproporti-
1,5
onale Erhöhung des Erregerstromes erforderlich. Eine Fluss-
1 dichte von etwa 2,2 T kann in üblichen Eisenarten erreicht
werden.
0,5
H
Abbildung 2.4: Magnetisierungskennlinie mit Sättigung
2.3 Kraftwirkung
Auf einen Strom führenden Leiter in einem Magnetfeld wird eine Kraft senkrecht zum Leiter
und senkrecht zu dem magnetischen Feld ausgeübt.
Technische Universität Hamburg-Harburg, Institut für Elektrische Energiesysteme und Automation
Prof. Dr.-Ing. G. Ackermann, Eißendorfer Str. 38, 21073 Hamburg](https://image.slidesharecdn.com/vorlesungsskriptelmaschinhalt-120222082306-phpapp02/85/Vorlesungsskript-el-masch_inhalt-7-320.jpg)













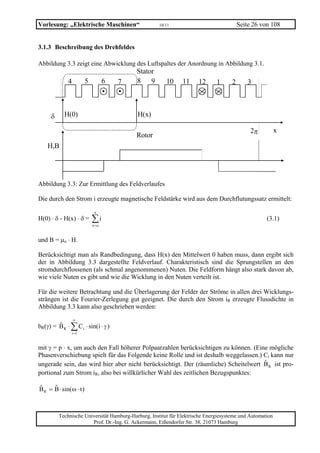
![Vorlesung: „Elektrische Maschinen“ 10/11 Seite 27 von 108
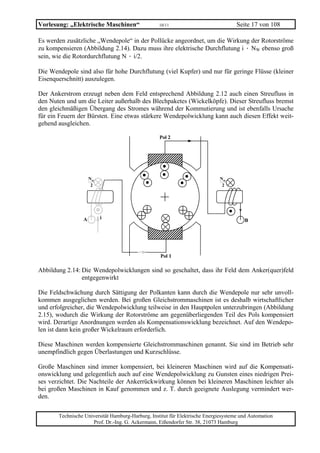
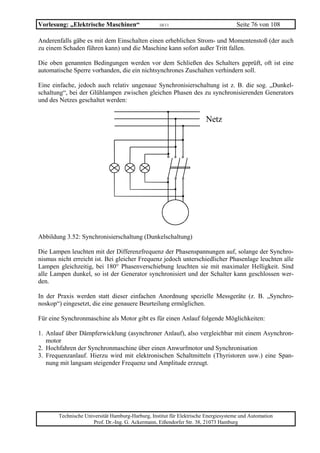
Für die Wicklungsstränge S und T muss jeweils die räumliche und zeitliche Verschiebung um
± 120° (± 2/3 π) ergänzt werden und man erhält:
∞
bR(γ,t) = B ⋅ sin (ω ⋅ t) ⋅ ∑C
i =1
i ⋅ sin (i ⋅ γ)
∞
2 2
bS (γ, t) = B ⋅ sin (ω ⋅ t -
3
π) ⋅ ∑C
i =1
i ⋅ sin (i ⋅ γ -
3
π)
∞
2 2
bT (γ,t) = B ⋅ sin (ω ⋅ t +
3
π) ⋅ ∑C
i =1
i ⋅ sin (i ⋅ γ +
3
π)
1
Unter Nutzung der Gleichung (Additionstheorem) sin α ⋅ sin β = [cos (α - β) - cos (α + β)] und
2
von
4 2
cos (x - π) = cos (x + π) folgt:
3 3
∞
B
bR (γ, t) =
2
⋅ ∑C
i =1
i [cos (ωt – i ⋅ γ) - cos (ω ⋅ t + i ⋅ γ)]
∞
B 2
bS (γ, t) =
2
⋅ ∑C
i =1
i [cos (ωt – i ⋅ γ) – cos (ω ⋅ t + i ⋅ γ +
3
π)]
∞
B 2
bT (γ, t) =
2
⋅ ∑C
i =1
i [cos (ωt – i ⋅ γ) – cos (ω ⋅ t + i ⋅ γ -
3
π)]
Das gesamte Feld ist die Addition der drei einzelnen Felder. Da die Summe der zweiten cos-
Terme null ist, folgt schließlich:
∞
3
b (γ, t) =
2
B ⋅ ∑C i =1
i ⋅ cos (ω ⋅ t – i ⋅ γ)
∞
3
b (γ, t) =
2
B ⋅ ∑C i =1
i ⋅ cos (ω ⋅ t – i ⋅ p ⋅ x)
Das gesamte Feld besteht also aus :
1. Grundfeld (i = 1), das die Polpaarzahl p besitzt und mit der Winkelgeschwindigkeit
ωo = ω/p (synchrone Drehzahl) rotiert (s. auch Abbildung 3.9).
2. Oberfelder (i > 1), die die Polpaarzahl i ⋅ p besitzen und entsprechend mit
ωi = ωo/(i⋅p) rotieren.
Die Drehzahl des Rotors in einer Drehfeldmaschine ist durch das Grundfeld bestimmt (synchron
oder asynchron). Die Oberfelder würden eine Rotation mit 1/3, 1/5 ... Drehzahl erzeugen wollen
und würden so die eigentliche Funktion behindern.
Technische Universität Hamburg-Harburg, Institut für Elektrische Energiesysteme und Automation
Prof. Dr.-Ing. G. Ackermann, Eißendorfer Str. 38, 21073 Hamburg](https://image.slidesharecdn.com/vorlesungsskriptelmaschinhalt-120222082306-phpapp02/85/Vorlesungsskript-el-masch_inhalt-27-320.jpg)



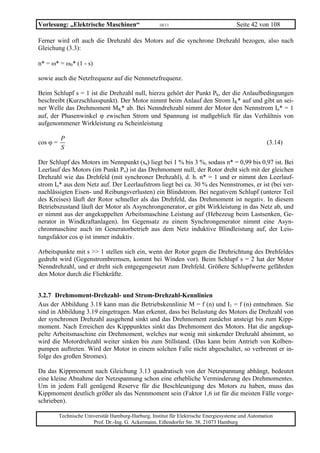
![Vorlesung: „Elektrische Maschinen“ 10/11 Seite 31 von 108
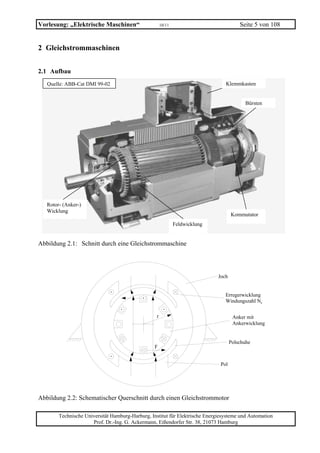
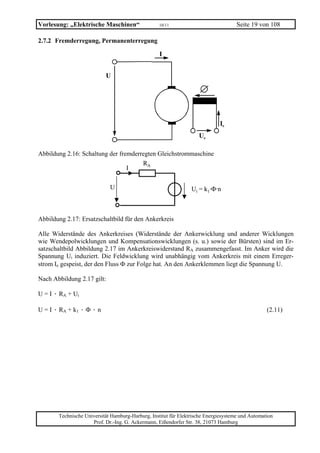
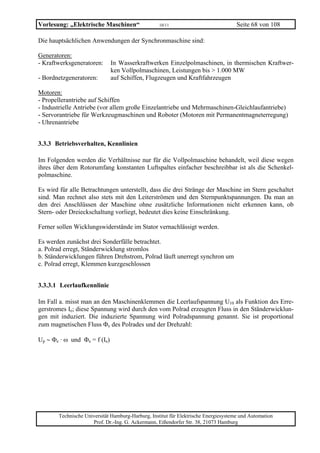
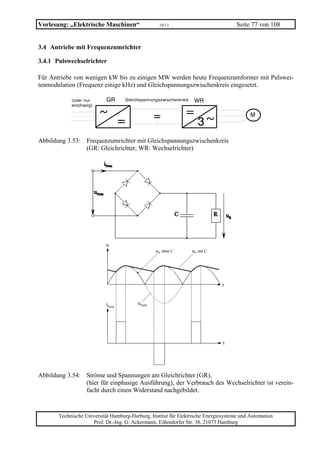
Die folgenden Diagramme zeigen diesen Zusammenhang für eine handelsübliche Baureihe von
Asynchronmotoren.
2500
2000
Masse [kg]
1500
3600 1/min
1000
1800 1/min
1200 1/min
500
900 1/min
0
0 0,5 1 1,5 2 2,5 3
Drehmoment [kN]
2500
2000
Masse [kg]
1500
3600 1/min
1000 1800 1/min
1200 1/min
500 900 1/min
0
0 50 100 150 200 250 300 350 400 450
Leistung [kW]
Abbildung 3.7: Zusammenhang zwischen Baugröße (hier die Masse), Drehmoment und Leistung
für eine Baureihe von Drehstromasynchronmaschinen mit Käfigläufer
Technische Universität Hamburg-Harburg, Institut für Elektrische Energiesysteme und Automation
Prof. Dr.-Ing. G. Ackermann, Eißendorfer Str. 38, 21073 Hamburg](https://image.slidesharecdn.com/vorlesungsskriptelmaschinhalt-120222082306-phpapp02/85/Vorlesungsskript-el-masch_inhalt-31-320.jpg)













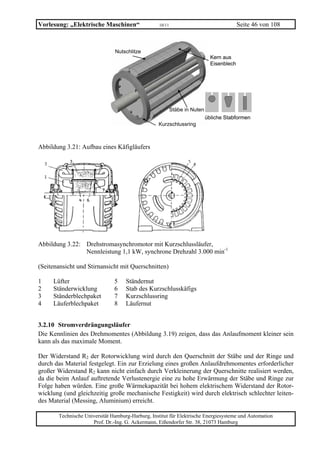




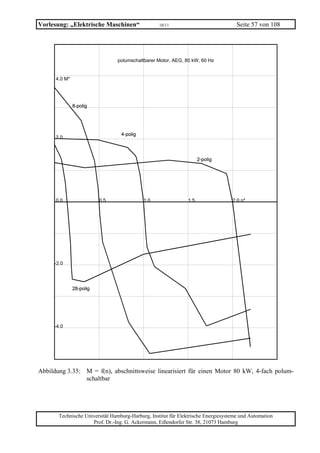
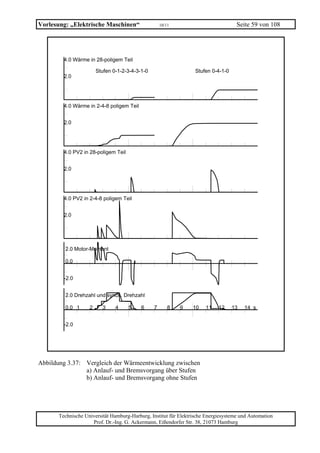
![Vorlesung: „Elektrische Maschinen“ 10/11 Seite 52 von 108
ω
⎡ 1 ⎤ 2
EV = J ⎢ ω1ω2 − ω2 ⎥
2
⎣ 2 ⎦ ωA
1 1
EV = J [ω1ω2 - ω1ωA - ω22 + ωA2]
2 2
ω2
Verlustenergie in der Kupplung
ω1
Zunahme der kinetischen Energie
während die Kupplung eingeschaltet ist.
ωΑ ω2 ω1
Ekin
kinetische Energie zur Zeit t0 : =1/2ω02
J
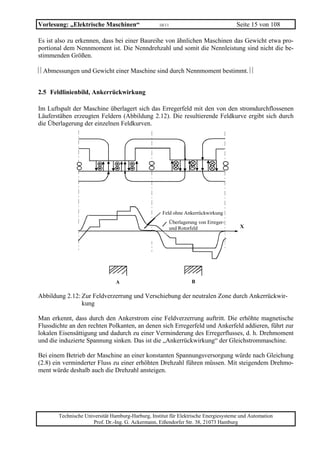
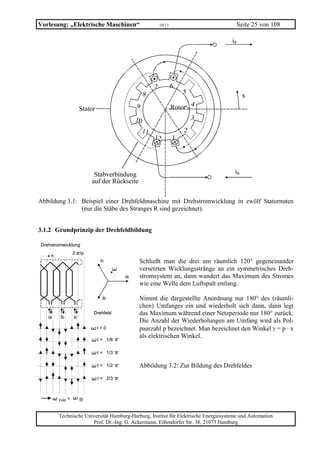
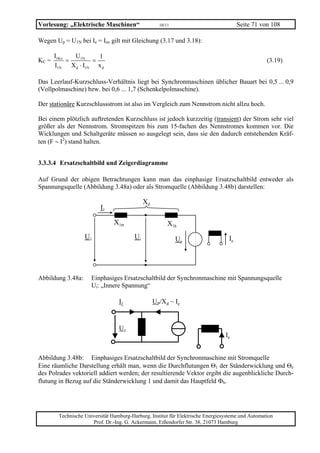
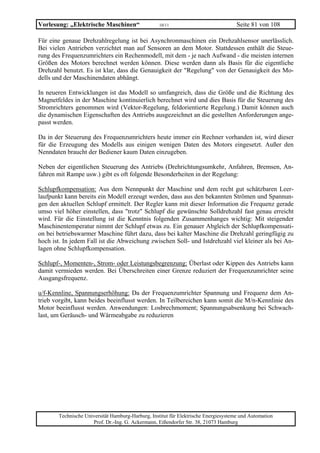
Abbildung 3.31: Kinetische Energie und Verlustarbeit bei einem Anlauf von einer Drehzahl ωA
aus.
Beim Schalten der Kupplung über Drehzahlstufen wird insgesamt Verluste-Energie eingespart.
Bei einem Asynchronmotor entspricht das dem Einschalten über eine Drehzahlstufe mit kleinerer
Nenndrehzahl (größer Polzahl der Wicklung)
ω2 Verlustenergie in der Kupplung
ω12 kinetische Energie
ω11
ω11 : Drehzahl der ersten Getriebestufe
ω12 : Drehzahl der zweiten Getriebestufe
Abbildung 3.32: Kinetische Energie und Verlustarbeit bei Anlauf mit zwei Übersetzungsstufen
(Polpaarzahl umschaltbar)
Die größte Einsparung an Verlustenergie ergibt sich bei gleichen Drehzahlstufen.
Der Bremsbetrieb von Kupplungen oder Asynchronmotoren tritt auf, wenn die Ausgangsdrehzahl
ωA größer als die Antriebsdrehzahl ω1 ist (bzw. die Drehfelddrehzahl).
Technische Universität Hamburg-Harburg, Institut für Elektrische Energiesysteme und Automation
Prof. Dr.-Ing. G. Ackermann, Eißendorfer Str. 38, 21073 Hamburg](https://image.slidesharecdn.com/vorlesungsskriptelmaschinhalt-120222082306-phpapp02/85/Vorlesungsskript-el-masch_inhalt-52-320.jpg)
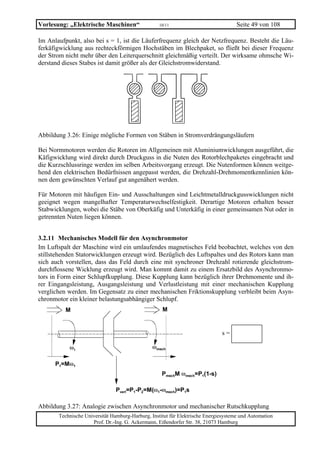
![Vorlesung: „Elektrische Maschinen“ 10/11 Seite 53 von 108
1 1
EV = J [ω1ω2 - ω1ωA - ω22 + ωA2]
2 2
ω2
Verlustenergie in der Kupplung
(evtl. in der Bremse bei ω1=0)
ω1
ω2
ω2 ωΑ
Rückspeisung in das Netz
ERück=Jω1(ω2-ω0)
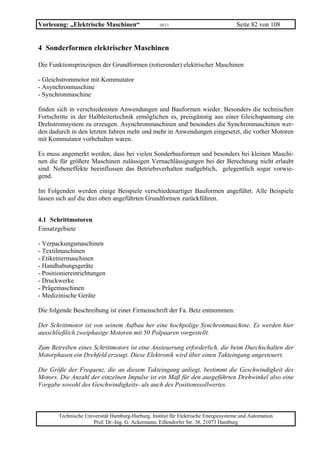
Abbildung 3.33: Energieanteile bei Abbremsen von einer übersynchronen Drehzahl ωA
Z. B. treten bei der Abbremsung eines Motors aus der Synchrondrehzahl einer vierpoligen Stufe
mit der Drehzahl ωA auf eine achtpolige Stufe mit der Drehzahl ω1 und anschließender Abbrem-
sung auf Stillstand mit der mechanischen Bremse folgende Energiebeträge auf:
ω2
ωΑ
4-polig
Verlustenergie im Rotor
ω1
8-polig Rückspeisung in das Netz
ω2
ω1 ωΑ
Verlustenergie in der Bremse
Abbildung 3.34: Energieanteile bei Abbremsen aus 4-poliger Stufe über 8-polige Stufe und dann
mechanische Bremse
Technische Universität Hamburg-Harburg, Institut für Elektrische Energiesysteme und Automation
Prof. Dr.-Ing. G. Ackermann, Eißendorfer Str. 38, 21073 Hamburg](https://image.slidesharecdn.com/vorlesungsskriptelmaschinhalt-120222082306-phpapp02/85/Vorlesungsskript-el-masch_inhalt-53-320.jpg)
































![Vorlesung: „Elektrische Maschinen“ 10/11 Seite 101 von 108
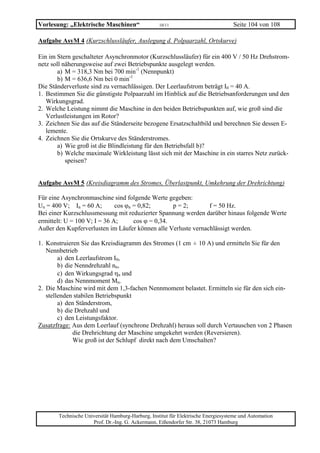
Aufgabe GM 4 (Nebenschlussmotor)
Ein Gleichstromnebenschlussmotor besitzt die folgenden Daten:
Pn = 150 kW; Un = 500 V; In = 325 A; Ra = 0,05 Ω; nn = 1600 min-1;
Ifn = 5 A; Ufn = 500 V.
Bürstenübergangswiderstände werden vernachlässigt. Eisensättigung wird vernachlässigt, d.h.
Maschinenfluss und Erregerstrom sind einander proportional.
Es gibt in der Maschine Reibungs- und Lüfterverluste.
1. Zeichnen Sie das elektrische Ersatzschaltbild und berechnen Sie den Widerstand der Erreger-
wicklung.
2. Berechnen Sie im Nennpunkt
a.) das Drehmoment an der Welle,
b.) die induzierte Spannung,
c.) kφ, sowie
d.) die Verluste in Anker- und Erregerwicklung und
e.) den Wirkungsgrad.
3. Welche Leerlaufdrehzahl ergibt sich bei Nennspannung und bei halber Nennspannung?
4. Welche Drehzahlen ergeben sich bei Belastung mit Nenndrehmoment und Speisung
a) mit Nennspannung
b) mit halber Nennspannung?
5. Zeichnen Sie das Kennlinienfeld der Maschine im 1. Quadranten.
Aufgabe GM 5 (Reihenschlussmaschine, Sättigung, Messung: Drehmoment-Ankerstrom )
An einer Gleichstromreihenschlussmaschine (Un = 600 V; nn = 1000 min-1; In = 180 A) wurde im
Prüffeld folgender Zusammenhang zwischen Drehmoment und Ankerstrom gemessen:
M [Nm] 36,3 145,2 323,7 907,4 1294,9 1491
I [A] 30 60 90 180 240 270
Bei Nennstrom betragen die Erregerverluste 4 kW. Ankerrückwirkung, Eisen- und mechanische
Verluste sind zu vernachlässigen.
1. Wie groß sind die Nennleistung und der Wirkungsgrad im Nennbetrieb? Welche Werte ergeben
sich für die Widerstände der Erreger- und Ankerwicklung?
2. Berechnen Sie die Drehzahl bei Nennspannung und Nennstrom, wenn der Erregerwicklung ein
Widerstand RP von der halben Größe des Erregerwiderstandes parallelgeschaltet wird!
3. Der Maschine wird (ohne den Parallelwiderstand RP) bei Nennspannung ein Widerstand RS =
0,5 Ω vorgeschaltet. Wie groß ist die Drehzahl bei einem Ankerstrom von 240 A?
4. Die Maschine soll bei Widerstandsbremsung (sie wird vom Netz getrennt, die Erregerwicklung
wird umgepolt und die Maschine auf einen ohmschen Widerstand geschaltet) und einer Dreh-
zahl von 500 min-1 ein Bremsmoment von 1491 Nm entwickeln. Wie groß muss der ange-
schlossene Widerstand sein?
Technische Universität Hamburg-Harburg, Institut für Elektrische Energiesysteme und Automation
Prof. Dr.-Ing. G. Ackermann, Eißendorfer Str. 38, 21073 Hamburg](https://image.slidesharecdn.com/vorlesungsskriptelmaschinhalt-120222082306-phpapp02/85/Vorlesungsskript-el-masch_inhalt-101-320.jpg)
![Vorlesung: „Elektrische Maschinen“ 10/11 Seite 102 von 108
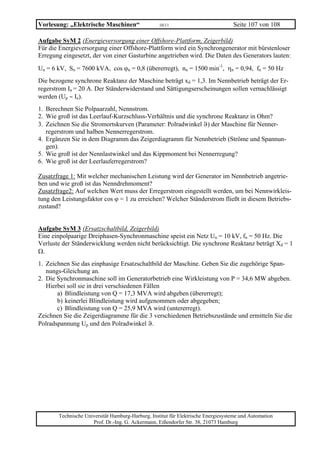
Aufgabe GM 6 (Gleichstrommaschine, Messung: Ankerspannung-Erregerstrom)
Eine Gleichstrommaschine wird als fremderregte Maschine geschaltet und mit 900 min-1 angetrie-
ben. Im Leerlauf ergibt sich dann folgender Zusammenhang zwischen der Ankerspannung und
dem Erregerstrom:
UA [V] 0 50 100 150 200 250
If [A] 0 0,4 0,8 1,4 2,2 4
Der Ankerwiderstand der Maschine beträgt 0,125 Ω, der Widerstand der Erregerwicklung 104,55
Ω.
Die Reibungs- und Eisenverluste werden vernachlässigt.
Gesucht werden jeweils:
a) Drehmoment,
b) Drehzahl und
c) mechanische Leistung
bei einem Ankerstrom von 80 A für den Betrieb als:
1. Nebenschlussmotor (UNetz = 230V);
2. Nebenschlussmotor (UNetz = 230V) mit einem Vorwiderstand RfV = 183 Ω im Erregerkreis;
3. fremderregter Motor mit If = 2,2 A und UNetz = 130 V.
Hinweis: Zeichnen Sie zur Berechnung ein Ersatzschaltbild!
6.3 Asynchronmaschine
Aufgabe AsyM 1 (Schleifringläufer, Kipppunkt, Läuferwiderstand)
An einem Asynchronmotor mit Schleifringläufer (Ständer und Läufer Y-Schaltung) und zwei Pol-
paaren (p = 2) und mit der Nennspannung:
Un = 660 V fn = 50 Hz
ergeben sich folgende Messwerte:
1) Leerlauf (Synchrondrehzahl) bei Nennspannung und Nennfrequenz:
Ständerstrom I0 = 40 A
2) Kurzschluss (Stillstand) bei Nennfrequenz und einer Ständerspannung von U = 130 V:
a.) Ständerstrom I1A = 120 A;
cosϕ1A = 0,15;
b.) Läuferstrom I2A = 200 A.
Die Sättigung und alle Verluste außer den Kupferverlusten im Läufer können vernachlässigt wer-
den.
1. Wie groß sind der Strom, das Moment und der Schlupf des Motors im Kipppunkt?
2. Wie groß ist die mechanische Leistung und der Schlupf bei maximalem cos(ϕ)?
3. Wie groß ist der Läuferwiderstand R2 (den man an der Rotorklemmen messen kann)?
Zusatzfrage: Welche Läuferspannung ergibt sich im Stillstand bei offenen Schleifringen, wenn der
Ständer an Nennspannung liegt?
Technische Universität Hamburg-Harburg, Institut für Elektrische Energiesysteme und Automation
Prof. Dr.-Ing. G. Ackermann, Eißendorfer Str. 38, 21073 Hamburg](https://image.slidesharecdn.com/vorlesungsskriptelmaschinhalt-120222082306-phpapp02/85/Vorlesungsskript-el-masch_inhalt-102-320.jpg)




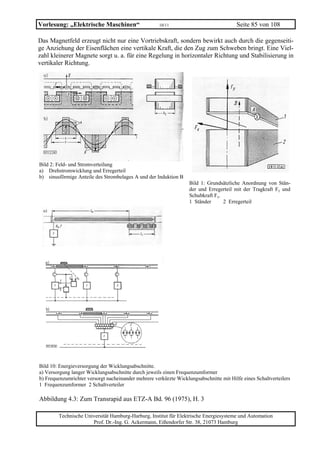
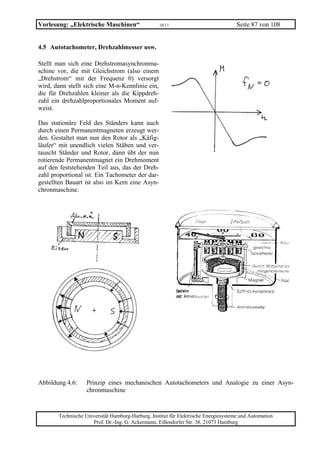
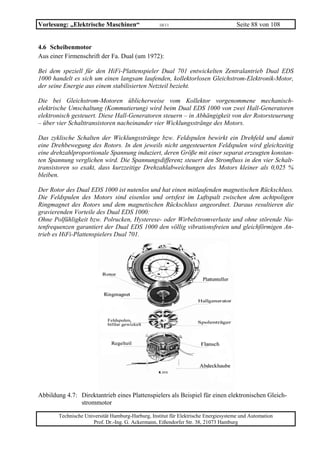
Die Vorlesung "elektrische Maschinen" von Prof. Dr.-Ing. G. Ackermann an der Technischen Universität Hamburg-Harburg behandelt ausführlich die Grundlagen, den Aufbau und die Funktionsweise von elektrischen Maschinen, einschließlich Gleichstrom-, Drehfeld- und Synchronmaschinen. Das Dokument liefert strukturierte Inhalte mit Formelzeichen, technischen Begriffen und spezifischen Berechnungen, ergänzt durch Übungsaufgaben. Änderungen gegenüber einer früheren Ausgabe umfassen die Hinzufügung von Aufgaben zu Asynchronmotoren und kleinere Korrekturen.















