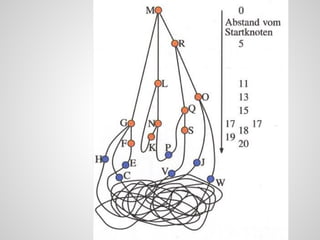
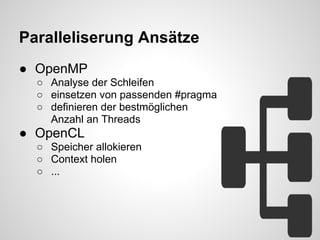
Das Dokument behandelt die Anwendung der Graphentheorie, insbesondere den kürzesten Weg Algorithmus und dessen Parallelisierung durch Multiprozessor- und Einzelprozessoransätze. Der Dijkstra-Algorithmus wird erklärt und verschiedene Parallelisierungsansätze wie OpenMP und OpenCL werden vorgestellt, wobei OpenMP eine signifikante Geschwindigkeitssteigerung von bis zu viermal erzielen kann. Die Herausforderungen bei der Implementierung mit OpenCL, insbesondere auf verschiedenen Plattformen, werden ebenfalls angesprochen.