Downloaden Sie, um offline zu lesen
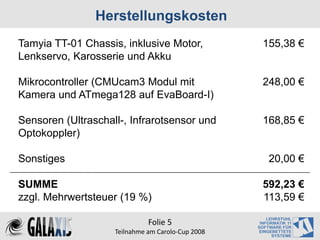
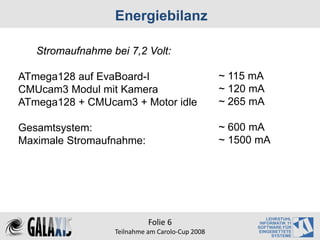
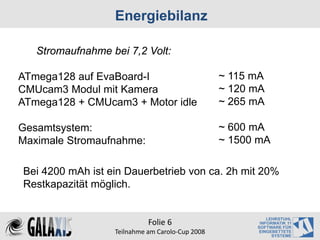

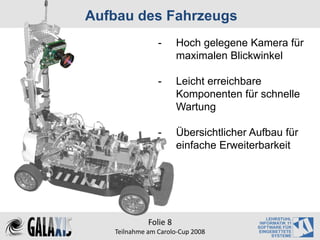
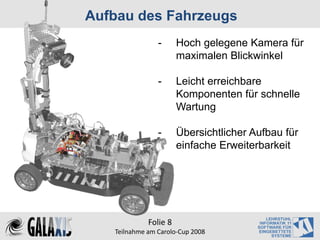
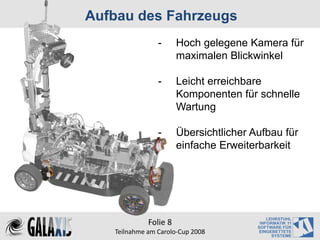
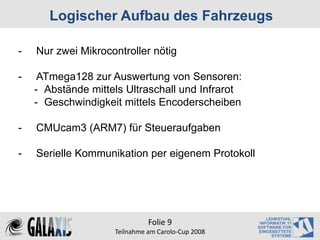
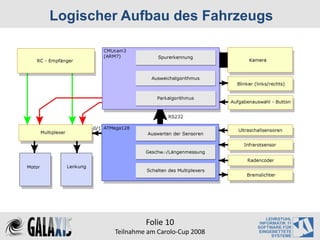
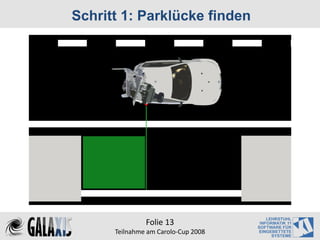
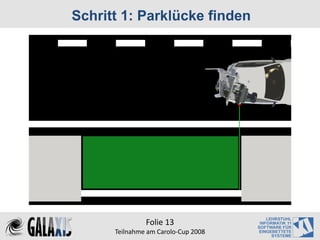
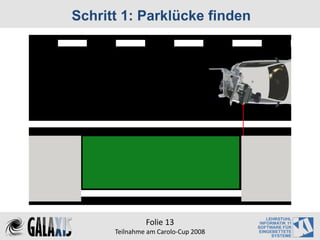
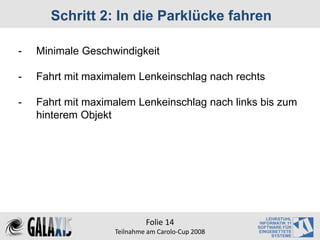









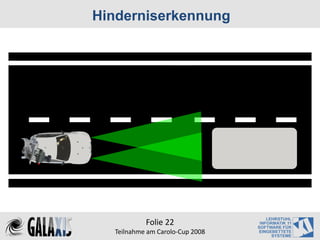
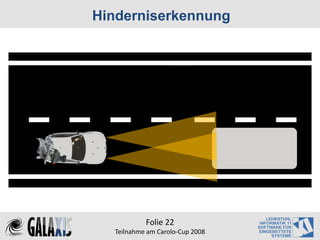
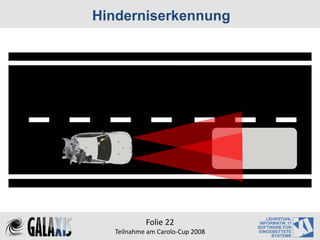
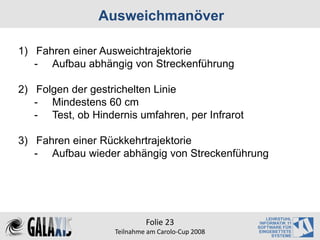
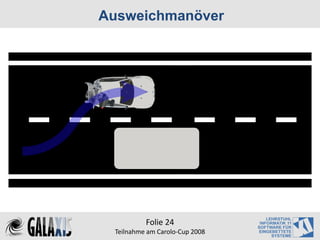
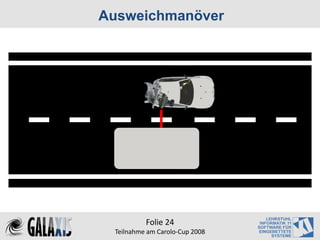
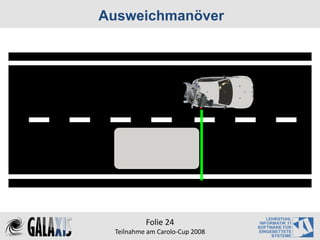

Das Dokument beschreibt die Teilnahme des Teams Galaxis am Carolo-Cup 2008, einschließlich der Herstellungskosten und Energiebilanz des Fahrzeugs sowie des Konzeptes für autonomes Einparken und Spurführung mit Ausweichmanövern. Es werden technische Details zur verwendeten Hardware und Funktionsweise des Fahrzeugs präsentiert, einschließlich der Herausforderungen und Lösungen beim autonomen Fahren. Zudem werden die Anforderungsprofile und die Schritte zur Fahrzeugerkennung und -steuerung erläutert.



























