CONTROL DE NIVEL HORIZONTAL DE UNA PLATAFORMA GIRATORIA
•
0 gefällt mir•996 views

COMPRENDE LAS ECUACIONES DE TRANSFERENCIA Y DIAGRAMAS DE BLOQUES SIMPLICADOS PARA EL CONTROL DE NIVEL HORIZONTAL DE UNA PLATAFORMA GIRATORIA.

Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (20)
Andere mochten auch
Andere mochten auch (11)
Ähnlich wie CONTROL DE NIVEL HORIZONTAL DE UNA PLATAFORMA GIRATORIA
Ähnlich wie CONTROL DE NIVEL HORIZONTAL DE UNA PLATAFORMA GIRATORIA (20)
Mehr von IUT DEL ESTADO BÓLIVAR (IUTEB)
Mehr von IUT DEL ESTADO BÓLIVAR (IUTEB) (19)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
CONTROL DE NIVEL HORIZONTAL DE UNA PLATAFORMA GIRATORIA
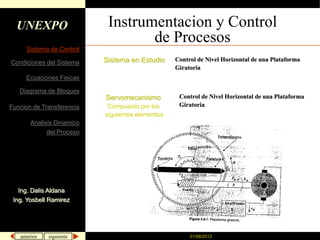
- 1. UNEXPO Instrumentacion y Control de Procesos Sistema de Control Condiciones del Sistema Sistema en Estudio Control de Nivel Horizontal de una Plataforma Giratoria Ecuaciones Fisicas Diagrama de Bloques Servomecanismo Control de Nivel Horizontal de una Plataforma Funcion de Transferencia Compuesto por los Giratoria siguientes elementos Analisis Dinamico del Proceso Ing. Dalis Aldana Ing. Yosbell Ramirez anterior siguiente 01/08/2012
- 2. UNEXPO Instrumentacion y Control de Procesos Sistema de Control Condiciones del Sistema Sistema en Estudio Control de Nivel Horizontal de una Plataforma Giratoria Ecuaciones Fisicas Diagrama de Bloques Servomecanismo Potenciometro Circular: Alimentado por una Funcion de Transferencia Compuesto por los tension constante E y del que se obtiene tension siguientes elementos diferencial Vd mediante las dos escobillas solidarias Analisis Dinamico con la plataforma. del Proceso Amplificador de Ganacia K: Proporciona una tension Vm proporcional a la tension de entrada Vd Motor: Capaz de dar un par Pm proporcional a la tension de alimentacion Vm, con constante Kp Transmision: Formada por un husillo cuyo giro m mueve un piñon de N dientes, solidario a la plataforma. Momento de Inercia J y rozamiento viscoso B del conjunto motor transmision. El sistema se ve sometido a perturbaciones consistentes en un Par Pp que actua sobre la plataforma anterior siguiente 01/08/2012
- 3. UNEXPO Instrumentacion y Control de Procesos Sistema de Control Condiciones del Sistema Sistema en Estudio Control de Nivel Horizontal de una Plataforma Giratoria Ecuaciones Fisicas Modelacion Basica del Proceso Ecuaciones Fisicas del Sistema Diagrama de Bloques Potenciometro Funcion de Transferencia Sea V1: Tension en la escobilla derecha Analisis Dinamico V2: Tension en la escobilla izquierda del Proceso Vd: Tension en el amplificador Asi Vd(t)= V1(t)-V2(t) Donde V1 es una funcion lineal del angulo V1(t) = a + b (t) Obteniendose: V1(t) = (E/ )( /2+ (t)) V2(t) = (E/ )( /2- (t)) Verificandose que para = /2 V1(t) = E =0 V1(t) = E/2 Por lo tanto Vd(t): (2E/ ) (t) anterior siguiente 01/08/2012
- 4. UNEXPO Instrumentacion y Control de Procesos Sistema de Control Modelacion Basica del Proceso Ecuaciones Fisicas del Sistema Condiciones del Sistema Ecuaciones Fisicas Amplificador Proporciona una tension Vm proporcional a la tension de entrada Vd Diagrama de Bloques Asi Vm(t) = KVd(t) Funcion de Transferencia Motor Capaz de dar un par Pm proporcional a la tension de alimentacion Vm, con Analisis Dinamico constante Kp del Proceso Asi Pm(t) = Kp Vm(t) Equilibrio de Pares Generado por el motor para vencer la inercia el rozamiento viscoso y proporcionar un par a la plataforma Asi Pm(t) - Pp(t)/N=J "(t)+B '(t)+ Pp(t)/N Transmision Piñon-Husillo Una vuelta del husillo (motor) hace avanzar un paso de rosca y por lo tanto el piñon avanzara un diente, solidario a la plataforma Asi (t) = - m(t)/N anterior siguiente 01/08/2012
- 5. UNEXPO Instrumentacion y Control de Procesos Sistema de Control Modelacion Basica del Proceso Ecuaciones Fisicas del Sistema Condiciones del Sistema Ecuaciones Fisicas Transformacion de las ecuaciones fisicas al dominio de Laplace Diagrama de Bloques Potenciometro Vd(t)=(2E/ ) (t) L Vd(t)= (2E/ ) (t) Vd(s)= (2E/ ) (s) Funcion de Transferencia Amplificador Analisis Dinamico Vm(t) = KVd(t) L Vm(t) = KVd(t) Vm(s) = KVd(s) del Proceso Motor Pm(t) = Kp Vm(t) L Pm(t) = Kp Vm(t) Pm(s) = Kp Vm(s) Equilibrio de Pares Pm(t) - Pp(t)/N=J "(t)+B '(t)+ Pp(t)/N m(s) = (Pm(s)- Pp(s)/N)/(Js2+Bs) (s) = - m(s)/N anterior siguiente 01/08/2012
- 6. UNEXPO Instrumentacion y Control de Procesos Sistema de Control Condiciones del Sistema Diagrama de Bloques de la Plataforma Ecuaciones Fisicas Diagrama de Bloques Funcion de Transferencia Pp 1/N Analisis Dinamico del Proceso Amplif. Motor - K Kp 1/(Js2+Bs) -1/N Vm Pm + m Vd Potenc. 2E/ anterior siguiente 01/08/2012
- 7. UNEXPO Instrumentacion y Control de Procesos Sistema de Control FUNCION DE TRANSFERENCIA. M(s)= (s) / Pp(s) Condiciones del Sistema Ecuaciones Fisicas Utilizando el metodo de simplificación de bloques: Diagrama de Bloques Pp Funcion de Transferencia 1/N Analisis Dinamico - del Proceso (2E/ ) (KKp) -1/N(Js2+Bs) + -1/N(Js2+Bs) 1/N 1- (2E/ ) (KKp) /N(Js2+Bs) Pp(s) 1/N(Js2+Bs) 1/N (s) 1+ (2E/ ) (KKp) /N(Js2+Bs) anterior siguiente 01/08/2012
- 8. UNEXPO Instrumentacion y Control de Procesos Sistema de Control FUNCION DE TRANSFERENCIA. Condiciones del Sistema Ecuaciones Fisicas Simplificando se tiene: Diagrama de Bloques M(s) = 1/JN2 S2 +(B/J)S+ (2E/ JN) (KKp) Funcion de Transferencia Se trata de un sistema de segundo orden sub-amortiguado con Analisis Dinamico las siguientes caracteristicas: del Proceso Wn = 2EKKp = NB2 JN 8JEKpK Para que la respuesta del sistema ante entrada escalon no presente sobreoscilacion, el valor limite de será 1 (sistema criticamente amortiguado). De esta condicion se deriva que: K NB2 8JEKp anterior siguiente 01/08/2012