
Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (20)
Ähnlich wie principe de fonctionnement machine asynchrone -www.cours-online.com
Ähnlich wie principe de fonctionnement machine asynchrone -www.cours-online.com (20)
Mehr von morin moli
Mehr von morin moli (20)
principe de fonctionnement machine asynchrone -www.cours-online.com
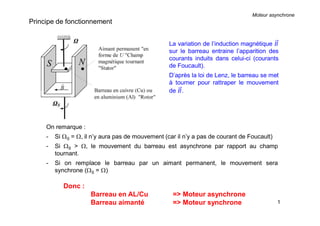
- 1. Moteur asynchrone 1 Principe de fonctionnement On remarque : - Si S = , il n’y aura pas de mouvement (car il n’y a pas de courant de Foucault) - Si S > , le mouvement du barreau est asynchrone par rapport au champ tournant. - Si on remplace le barreau par un aimant permanent, le mouvement sera synchrone (S = ) Donc : Barreau en AL/Cu => Moteur asynchrone Barreau aimanté => Moteur synchrone La variation de l’induction magnétique sur le barreau entraine l’apparition des courants induits dans celui-ci (courants de Foucault). D’après la loi de Lenz, le barreau se met à tourner pour rattraper le mouvement de .
- 2. Moteur asynchrone 2 Moteur asynchrone triphasé Rotor Bobinage Stator - Moteur très utilisé (simple à construire, très fiable, peu d’entretien) - Stator (partie fixe avec bobinage) - Rotor (bobiné en cage d’écureuil) - Les deux circuits magnétiques sont constitués d’un empilage de fines tôles métalliques (évite circulation des courants de Foucault). Inspiré du cours de M. Alain Charbonnel (Caen)
- 3. Moteur asynchrone 3 Principe de fonctionnement Le principe des moteurs à courants alternatifs repose sur l’utilisation d’un champ magnétique tournant produit par des tensions alternatives Si plusieurs bobines sont placées à proximité les unes des autres, le champ magnétique résultant est la somme vectorielle. (dans le cas des 3 bobines, elles sont disposées dans le stator à 120° les unes des autres) Les 3 enroulements statoriques créent donc un champ magnétique tournant, sa fréquence est nommée fréquence de synchronisme (une boussole placée au centre tournerait à cette vitesse de synchronisme). La circulation d’un courant alternatif dans une bobine créée un champ magnétique B alternatif (même sens et fréquence que le courant) dans l’axe de la bobine (grandeur vectorielle).
- 4. Moteur asynchrone 4 Rotor en cage d’écureuil
- 6. Moteur asynchrone 6 Bobinages du stator (triphasé) Isolation des bobines Connexion des bobines entre elles
- 7. Moteur asynchrone 7 Branchement étoile ou triangle - Branchement étoile : La tension aux bornes de chacune des bobines est de 230V. - Branchement triangle : Chaque bobine est alimentée avec la tension nominale du réseau de 400V - L’utilisation du couplage étoile est utilisé si un moteur de 230 V doit être relié sur un réseau de 400 V ou si un moteur doit démarrer à puissance réduite (cas d’une charge à forte inertie mécanique).
- 8. Moteur asynchrone 8 Exemple de plaque signalétique
- 9. Moteur asynchrone 9 Puissance et rendement N = f p NS : Vitesse du champ tournant (tr/s) p : Nombre de paires de pôles f : fréquence du réseau d’alimentation (Hz) Pabsorbée (W) : = . . . ( ) avec U tension entre 2 phases Putile (W) : = . avec rendement du moteur = . avec Cu le couple utile et la rotation du moteur (rd/s) = ( . )/ Nr vitesse de rotation nominale (tr/min)
- 10. Moteur asynchrone 10 Caractéristique du moteur asynchrone Le couple (N.m) varie avec la fréquence de rotation (tr/min) du moteur accouplé à la charge entrainée (supposée fixe). Les caractéristiques du moteur et de la charge se croisent au point de fonctionnement pour lequel les couples moteur et résistant sont identiques. De manière générale, le point de fonctionnement en moteur doit être choisi pour N<Ns et doit être placé dans la partie verticale de la courbe (au plus près de la vitesse de rotation nominale Nr (aussi appelée Nn) Zone linéaire de fonctionnement
- 13. Moteur asynchrone 13 Branchement au réseau EDF La liaison du moteur au réseau nécessite un certain nombre de dispositifs de sécurité et de commande. Sectionneur d’isolement avec fusibles permet de déconnecter le moteur du réseau pour des opérations de maintenance par exemple. Il protège le dispositif en aval contre les risques de CC grâce aux fusibles. Le contacteur permet d’alimenter le moteur (en commande manuelle ou automatique avec un automate programmable). Le relais thermique protège le moteur contre les surcharges de courant (réglage de l’intensité maximal admissible). Il permet de détecter une différence de courants entre les phases en cas de coupure de liaison par exemple. Le transformateur abaisse la tension secteur à une valeur de 24V pour garantir la sécurité des utilisateurs sur la partie commande.
- 14. Moteur asynchrone 14 Remarque : Pour modifier le sens de rotation d’un moteur asynchrone triphasé, il suffit de permuter deux des trois phases.
- 15. Moteur asynchrone 15 Variateur de vitesse Le moteur asynchrone est très ancien mais il reste d’actualité. L’électronique permet de faire varier la fréquence de rotation. Il faut faire varier la fréquence du courant d’alimentation et donc du champ magnétique. Les variateurs de vitesse sont en fait des variateurs de fréquence. Ils permettent : - Variation de vitesse de 5% à 200% de la vitesse nominale - Une conservation du couple quelque soit la vitesse - Des rampes d’accélération et de décélération - Rotation dans les deux sens Une protection du moteur est intégrée au variateur La consigne de vitesse est en générale fournie sous forme d’une tension de 0 à 10 V par exemple. Le courant électrique issu du réseau est dans un premier temps converti en courant continu, et ensuite reconverti en courant alternatif par un onduleur à une fréquence différente (on peut aussi convertir du monophasé en triphasé si nécessaire). http://fisik.free.fr/ressources/onduleur.swf L’onduleur travaille en hacheur, qui va moduler le courant par largeur d’impulsions, le courant résultant est proche d’une sinusoïde. Principe de fonctionnement d’un onduler