Control position for servo motor
•Als PPT, PDF herunterladen•
1 gefällt mir•2,782 views


Empfohlen
Weitere ähnliche Inhalte
Andere mochten auch
Andere mochten auch (14)
Ähnlich wie Control position for servo motor
Ähnlich wie Control position for servo motor (20)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
Control position for servo motor
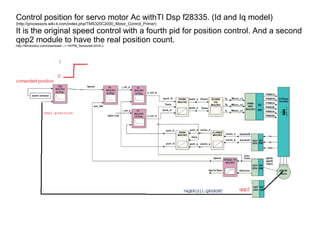
- 1. Control position for servo motor Ac withTI Dsp f28335. (Id and Iq model) (http://processors.wiki.ti.com/index.php/TMS320C2000_Motor_Control_Primer) It is the original speed control with a fourth pid for position control. And a second qep2 module to have the real position count. http://tbirobotics.com/download/---> HVPM_Sensored-SIVA.c
- 2. The problem is that motor spins abruptly. Motor damages. Ever have overshoot at end profile. I add a little low pass filter to init more smoothly ( not a fast 0 to 1). Now motor does not damage. (see clear blue line)
- 3. The same before in matlab figure. All are real time measures. The PID works bad. Impossible to get better adjusting parameters.
- 4. People use S-curve instead of 0-1 transitions for comanded position control motor. This is an example that uses Adept robots.
- 5. EXAMPLE 1: Maxon motor. EPOS_Application_Note_Position_Regulation_with_Feed_Forward_En.pdf
- 7. EXAMPLE 3a: Delta Tau. PMACTUNINGPRO.pdf This model use discrete formulation, how uses dsp.
- 8. EXAMPLE 3b: Delta Tau. Turbo PMAC User Manual.pdf Observe the two parameters Kvff and Kaff. Gains of speed and acc profiles. I will use these parameters.
- 9. EXAMPLE 4: Kollmorgen Kollmorgen AKD_User_Guide_(Parameter_Command-Fieldbus)_en-us Rev G.pdf
- 10. Alternative 1a: Jacques Richalet propose use PFC. The trajectory of reference is
- 11. Alternative 1b: Jacques Richalet propose for motor control a cascade of three PFC.
- 12. Now for motor position control I generate 3 profiles on Pc at real time. I send by usb. I inject them on the three pid loops.
- 13. If I only use the position profile (newpi_iq.Kff = 0 ; newpi_spd.Kff= 0), I have a delay between comanded position and real position ( blue lines)
- 14. If I use the three profiles (newpi_iq.Kff = 1.8 ; newpi_spd.Kff= 0.58), the delay between commanded and real position is minimal.
- 15. The problem is than with short cicles, the robot-slide have a real limit of 60 pieces for minute, to work with precision and smoothly.
- 16. If the s-curve is shorter, then the control is not good. At the end of movement, the slide have oscilations ever different. The movement is not smoothly neither precise.
- 17. Now the pi that I use is from Ti motor library. Pag 5 of DMC MATH.pdf
- 18. Pag 2 of DMC MATH.pdf modified to incorporate Kff
- 19. Pag 2 of DMC MATH.pdf modified to incorporate Kff
- 20. Pag 1 of file NEWPI.H The macro is not complicated for pi
- 21. The use of pi macro is very simple. file HVPM_Sensored-SIVA.c
- 22. To Jacques: The macro for PFC which would it be? Will be complicated? The profiles will be derived from exponentials?