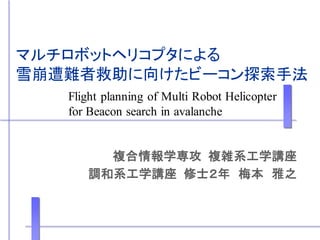
4. ヘリコプタのモデリング [加藤,1985]
発生する力
Tmr
Qmr メインロータの推力 : Tmr
Y テイルロータの推力 : Ttr
機体にかかる空気抵抗 : F fus
Ttr
Pitch,w Qtr 機体にかかる重力 : mg
Ffus
X
Roll,p 発生するモーメント
mg
メインロータのトルク : Qmr
Z テイルロータのトルク : Qtr
Yaw,r
ヘリコプタをモデル化し,運動方程式によりヘリコプタの動きを算出
フラッピング運動を近似し,制御指令値からブレードの傾きを算出
5. 制御器
3つの制御器を直列構造に接続し,サーボモータへの制御指令値を算出
[野波,2004]
Velocity Reference Input Signal
Position Reference Attitude Reference
Position Velocity Attitude Helicopter
Controller Controller Controller Dynamics
Attitude
Velocity
Position
PIDコントローラ(X軸) PID制御により目標値を算出
ex (t )
mx (t ) K Px ex (t ) K Ix ex (t ) K Dx
t
m(t ) : 目標値 t : サンプリング時間[sec]
e(t ) : t[sec] における現在値と目標値との偏差[m/sec]
K P : 比例ゲイン K I : 微分ゲイン K D : 積分ゲイン
6. 制御器
3つの制御器を直列構造に接続し,サーボモータへの制御指令値を算出
[野波,2004]
Velocity Reference Input Signal
Position Reference Attitude Reference
Position Velocity Attitude Helicopter
Controller Controller Controller Dynamics
Attitude
Velocity
Position
Memory-Based PID 制御
[Takao,2004] 速度制御器に適用 3軸:Kp
PIDパラメータの選択 PIDパラメータの修正
レコードと類似度を算出 制御誤差を利用
PIDパラメータ生成 データベース
類似度に応じた重み付き平均を算出