

Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (20)
Andere mochten auch
Andere mochten auch (20)
Ähnlich wie Clase2
Ähnlich wie Clase2 (20)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
Clase2
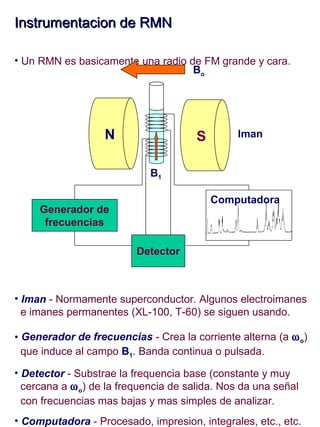
- 1. Instrumentacion de RMNInstrumentacion de RMN • Un RMN es basicamente una radio de FM grande y cara. • Iman - Normamente superconductor. Algunos electroimanes e imanes permanentes (XL-100, T-60) se siguen usando. • Generador de frecuencias - Crea la corriente alterna (a ωo) que induce al campo B1. Banda continua o pulsada. • Detector - Substrae la frequencia base (constante y muy cercana a ωo) de la frequencia de salida. Nos da una señal con frecuencias mas bajas y mas simples de analizar. • Computadora - Procesado, impresion, integrales, etc., etc. N S Bo B1 Detector Computadora Iman Generador de frecuencias
- 2. Excitacion por banda continuaExcitacion por banda continua • Completamente obsoleto, y solo util para espectros 1D. • La misma idea que en UV. Barremos las frecuencias a velocidad constante (o el campo magnetico, ya que tiene el mismo efecto - ω = γ B), y registramos como las distintas componentes de Mo generan Mxy a diferentes frecuencias (o campos magneticos). • Obtenemos un efecto del dominio del tiempo en el espectro de frecuencias (el famoso ‘ringing’) porque no podemos barrer lo suficientemente lento. tiempo ωo o Bo ωo o Bo (Datos del querido T-60...)
- 3. Excitacion pulsada - Transformada de FourierExcitacion pulsada - Transformada de Fourier • Lo que se usa en todos los equipos de RMN modernos. • La idea es simple. Tenemos dos formas de afinar un piano: Una involucra ir tecla por tecla grabando cada nota (i.e., cada frecuencia). La otra, muy mala para el piano, es darle un martillazo bien fuerte y grabar todo el ruido que haga. Todas las frecuencias (notas) van a estar en la grabacion. • Lo que necesitamos es el equivalente al martillo. Algo que tenga todas las frecuencias del espectro. Un pulso corto de radiofrecuencia tiene estas caracteristicas. • Para explicarlo, usamos una ‘caja negra’ matematica, La transformada de Fourier: Transforma informacion del dominio del tiempo al de frecuencia (y vice versa). • Si nuestros datos en el tiempo son periodicos, basicamente nos da las coponentes de frecuencia. Extremadamente util en RMN, donde todas las señales son periodicas. S(ω) = ∫S(t) e-iωt dt S(t) = 1 /2 π ∫S(ω) eiωt dt0 ∞ -∞ ∞
- 4. Tranformada de Fourier de ondas simplesTranformada de Fourier de ondas simples • Podemos explicar (o ver) algunas propiedades de la TF con funciones matematicas simples: • Para cos( ω * t ) • Para sen( ω * t ) • Se dice que los cosenos dan lineas absortivas, mientras que los senos dan lineas dispersivas. Nos vamos a referir a esto cuando hablemos de la fase del espectro. Tambien nos tenemos que acordar de esto para entender deteccion de señales por cuadratura. −ω ω −ω ω TF TF
- 5. Volviendo a los pulsos…Volviendo a los pulsos… • Ahora que sabemos como funciona la TF, podemos ver como funcionan los pulsos. Un pulso de radiofrecuencia es el producto de una onda (coseno) a ωo con una funcion escalon: • Esta es la forma del pulso en el eje de los tiempos. Para ver todas las frecuencias que tiene, hacemos una TF: • El resultado es una señal centrada en ωo que cubre un rango de frecuencias. Dependiendo del ancho de pulso tenemos rangos mas anchos (tp corto) o finos (tp largo). Hay que acordarse que f ∝ 1 / t. * = tp TF ωo TF: 1 a ωo = ±1TF: 1 a ωo = ±1 sen(tpω) TF: o sinc(tpω) tpω
- 6. θtp = γ * tp * B1 θtp = γ * tp * B1 Anchos y angulos de pulsosAnchos y angulos de pulsos • El ancho de pulso no solo esta asociado con el rango de frequencias (o banda de barrido), pero tambien indica por cuanto tiempo el campo B1 esta prendido. Por lo tanto es el tiempo en que hay torque sobre la magnetizacion neta (Mo): • Como el ancho de puslo para cierto angulo θtp va a depender del equipo (B1), siempre nos referimos a los pulsos en terminos de cuanto rotan a la magnetizacion (θtp). Tenemos pulsos de π / 4 (o 45), π / 2 (o 90), π (o 180), etc., etc. z x Mxy y z x y Mo B1 θtp tp
- 7. Algunos pulsos utilesAlgunos pulsos utiles • El pulso mas usado es el π / 2, poque pone la mayor cantidad de magnetizacion posible en el plano <xy> (la señal mas grande que el instrumento puede detectar): • El pulso π tambien es importante, ya que tiene el efecto de invertir las poblaciones del sistema de espines... • Controlando el espectrometro podemos obtener basicamente pulsos de cualquier duracion y angulo que se nos ocurra. z x Mxy y z x y Mo π / 2 z x -Mo y z x y Mo π
- 8. ‘‘Free Induction Decay’ (FID)Free Induction Decay’ (FID) • Nos olvidamos de la muestra. Estamos interesados en analizar la señal que aparece en la bobina receptora despues de que la magnetizacion neta queda en el plano <xy> (despues de un pulso π / 2). • Dijimos antes que la magnetizacion va a volver al equilibrio (z) precesionando. En el sistema rotatorio, la frecuencia de la precesion es ω - ωo. La relajacion de Mo en el plano <xy> es exponencial (mas luego...). Por lo tanto, la bobina receptora detecta una señal cosinusoidal que decae (para un solo tipo de espin): ω = ωo Mxy ω - ωo > 0 tiempo Mxy tiempo
- 9. ‘‘FID’ (continuado)FID’ (continuado) • En una muestra real tenemos decenas de sistemas de espines con frecuencias distintas, y distintas a la de B1 (la frecuencia portadora). Como usamos un pulso logramos excitar a todas estas frequencias simultaneamente, y por lo tanto todas estan combinadas en la bobina receptora. A esta señal la llamamos ‘‘Free Induction Decay’ (o FID): • La TF de esta señal nos da el espectro de RMN:
- 10. Adquicision de datosAdquicision de datos • Eso fue un poco rapido. Hay ciertas cosas que tenemos que tener en cuenta antes y despues de tomar una FID (o el espectro, la FID no es tan util depues de todo...). • Algunas dependen del sistema de deteccion. Como vamos a usar una computadora para adquirir los datos, solo podemos tomar cierto numero de muestras de la señal (velocidad de sampleado o sampling rate, SR). Cuantas va a depender de las frecuencias que tengamos en la FID. • El Teorema de Nyquist dice que tenemos que samplear al menos dos veces mas rapido que la señal mas rapida (o el ancho de espectro o spectral width, SW): • Si sampleamos al doble de la frecuencia, donde estan los puntos , no hay problema. • Ahora, si vamos muy lento y sampleamos a la mitad de la velocidad (los puntos ), la señal queda digitada en la computadora a 1/2 de la frecuencia real. Estos picos se ‘meten’ en el espectro con fuera de fase (fold-over). Esto se conoce como ‘aliasing’. SR = 1 / (2 * SW)
- 11. Deteccion en cuadraturaDeteccion en cuadratura • En los primeros equipos de RMN-TF, la frecuencia de B1 (portadora) se ponia mas arriba (o abajo) de las posibles frecuencias del espectro. Esto se hacia para que todas las señales fuesen o mas rapidas o mas lentas que la portadora, de modo que la computadora siempre supiese el signo de las frecuencias en la FID. • Dos problemas. Uno es ruido, que siempre esta ahi, y que si no lo sampleamos bien se ‘mete’ en el espectro. Tambien, para exitar señales lejos de la portadora necesitamos pulsos de muy buena calidad, cosa que no siempre se puede hacer. • Considerando esto, el mejor lugar para la portadora es en el medio del espectro: • Hay que considerar algunas cosas para poder hacer esto. portadora portadora
- 12. Deteccion en cuadratura (continuado)Deteccion en cuadratura (continuado) • ¿Como podemos decidir si la freqcuencia va mas rapido o mas lento que la portadora? Ponemos 2 bobinas receptoras a 90 grados (con una diferencia de fase de 90 grados): • La fase de la señal Rapida es opuesta a la de la señal Lenta, y la computadora usa esto para determinar los signos. ω (B1) L R L R Fase = 0 Fase=90Fase=0Fase=90 R R L L
- 13. Procesado de datos - Funciones de ventanaProcesado de datos - Funciones de ventana • La señal esta en la computadora sampleada correctamente. Ahora hay muchas cosas que se pueden hacer facilicimo. Una es filtrado. La parte ‘jugosa’ de la FID esta al principio. A medida que Mxy decae, tenemos mas y mas ruido: • Generalmente, el ruido es de alta frecuencia, y por eso es que los espectros de RMN tienen la linea de base que tienen. ¿Que tal si pudiesemos filtrar señales con frecuencias mas altas que cierto valor? • Usamos filtrado digital. Intuitivamente, mutiplicamos la FID con algo que haga disminuir el ruido al final: 0 0.10 0.20 0.30 0.40 0.50 t1 sec Señal + ruido... Ruido... 1
- 14. Funciones de ventana (continuado)Funciones de ventana (continuado) • En este caso, se llama multiplicacion exponencial, y tiene la siguiente forma matematica: • Porque elimina el ruido de alta frecuencia? En realidad, lo que hacemos es una convolucion de los datos en el dominio de frecuencias con la TF de una exponencial que decae. La TF de esta funcion es una Lorentziana con ancho de pico a media altura (APMA) igual a la constante de decaimiento, o ensanchado de linea (‘line broadening,’ LB), en Hz. • La convolucion hace que todo lo que tenga APMA menor que el LB desaparezca del espectro (mas o menos…). • Si usamos un LB negativo, la exponencial crece en vez de decaer, y deja que señales mas finas pasen, mejorando la resolucion pero empeorando el cociente señal/ruido. LB F(t) = 1 * e - ( LB * t ) - o - F(t) = 1 * e - ( t / τ )F(t) = 1 * e - ( LB * t ) - o - F(t) = 1 * e - ( t / τ )
- 15. 0 0.10 0.20 0.30 0.40 0.50 t1 sec Mejora de sensibilidad y/o resolucionMejora de sensibilidad y/o resolucion • Para una FID ‘virgen’ sin procesado, podemos usar factores de LB positivos o negativos y ver que pasa despues de la TF: TF TF LB = -1.0 HzLB = 5.0 Hz
- 16. Otras funciones de vantana utilesOtras funciones de vantana utiles • Gaussiana/Lorentziana: Mejora la resolucion sin empeorar mucho la sensibilidad. Preferible a usar solo LB negativo: • Hanning: Otra ventana para mejorar sensibilidad/resolucion: • Coseno/Seno: Se usan para espectros 2D/3D: • La funcion de ventana adecuada depende del experimento, y hay que jugar mucho con los parametros... F(t) = e - ( t * LB + σ2 t2 / 2 ) F(t) = 0.5 + 0.5 * cos( π t / tmax ) F(t) = cos( π t / tmax )
- 17. Tamaño de datos y ‘zero-filling’Tamaño de datos y ‘zero-filling’ • Otra cosa importante es el tamaño (en ‘bytes’) de nuestros datos (data size, SI). Hay que acordarse que estaba relacionado con el ancho del espectro (la velocidad de sampleado). Tambien esta relacionado con el tiempo total en el que sampleamos la FID. Mas tiempo significa mas datos. • Cuando empezo el RMN-TF, las computadoras tenian poca memoria. La mayoria solo dejaban samplear 16K (16384) puntos, lo que significaba que si queriamos buena resolucion, solo podiamos tomar datos por poco tiempo. • Inclusive teniendo mucha memoria, mas tiempo de sampleo reduce las repeticiones que podemos hacer en cierto tiempo. • Definimos la resolucion digital (digital resolution, DR) como el numero de Hz por punto en la FID para cierto SW: DR = SW / SI • Entonces, con un SW de 5 KHz y una FID de 16K, tenemos una resolucion digital de 0.305 Hz/punto. • Un problema obvio es que si tenemos un SW grande y un SI chico, la resolucion puede no ser suficiente para distinguir algunas lineas en el espectro. DR - digital resolution SW - spectral width (Hz) SI - data size (puntos)
- 18. ‘‘Zero-filling’ (continuado)Zero-filling’ (continuado) • ¿Hay alguna forma en que podamos mejorar la resolucion digital (i.e., el numero de puntos) sin tener que samplear por periodos largos? El truco se llama ‘zero-filling.’ • Lo que hacemos es aumentar el numero de puntos antes de hacer la TF agregando ceros al final de la FID. Generalmente agregamos una potencia de 2 de ceros (8K, 16K, etc.). • Asi aumentamos el radio de Hz/punto, y en muchos casos podemos mejorar el espectro. Ahora, si la FID es una chanchada para empezar, no podemos mejorarla mucho (la resolucion real no mejora sin samplear lo suficiente…). FID de 8K 8K de ceros FID de 8K FID de 16K
- 19. Fenomenos de relajacionFenomenos de relajacion • Hasta ahora no hablamos del fenomeno que retorna a la magnetizacion al equilibrio. La relajacion se encarga de esto. Hay dos tipos, y los dos son procesos de decaimiento exponencial en funcion del tiempo. Relajacion longitudinal o espin-red (T1): • Afecta componentes de la magnetizacion alineados con el eje z (Mz). - Perdida de energia del sistema a los alrededores (red) como calor. - Acople dipolar con otros espines, interaccion con particulas paramagneticas, etc... Relajacion transversa o espin-espin (T2): • Actua sobre componentes de la magnetizacion que esten en el plano <xy> (Mxy). - Interacciones espin-espin (J) hacen que Mxy se desfase. - Inhomogeneidades del campo del iman (‘fanning out’). - No puede ser mayor a T1. • Para entender los procesos de relajacion desde un punto de vista fenomenologico usamos las ecuaciones de Bloch, que describen la evolucion de un sistema de espines en el tiempo bajo los efectos de campos magneticos y relajacion. Mz z x y Mxy z x y
- 20. (ωeff = ωo - ω) Equaciones de BlochEquaciones de Bloch • Los campos magneticos interactuan con la magnetizacion (o el momento angular) generando un torque que la hace girar. Generalmente pensamos en B1 en el plano <xy> y Mo en el eje z. Las ecuaciones de Bloch son para cualquier caso, y describen variacion de M con el tiempo: dMx(t) / dt = γ [ My(t) * Bz - Mz(t) * By ] - Mx(t) / T2 dMy(t) / dt = γ [ Mz(t) * Bx - Mx(t) * Bz ] - My(t) / T2 dMz(t) / dt = γ [ Mx(t) * By - My(t) * Bx ] - ( Mz(t) - Mo ) / T1 • El γ aparece porque es L (el momento angular) que genera el torque. Sin tratar de entender muy bien de donde vienen, vemos que la variacion de M en un eje depende de lo que pase en los otros dos. • Analizamos las soluciones de las ecuaciones diferenciales para un caso ideal en el que tenemos magnetizacion solo en el plano <xy> (despues de un pulso π / 2 y para cierta ω): Mx(t) = Mo * cos( ωefft ) * e - t / T2 My(t) = Mo * sen( ωefft ) * e - t / T2 - t / T
- 21. Equaciones de Bloch (continuado)Equaciones de Bloch (continuado) • Graficamente vemos lo siguiente: • De estas ecuaciones se puede deducir que el mejor factor de LB que podemos usar es 1 / T2... Mx(t) = Mo * cos( ωefft ) * e - t / T2 My(t) = Mo * sen( ωefft ) * e - t / T2 Mz(t) = Mo * ( 1 - e - t / T1 )
- 22. Efecto nuclear Overhauser (NOE)Efecto nuclear Overhauser (NOE) • El NOE es otra de las rutas por las cuales cierto espin puede intercambiar energia. Por lo tanto, esta muy relacionado con los procesos de relajacion. En particular, el NOE se relaciona con el intercambio de energia entre dos espines que no esten acoplados escalarmente (JIS = 0), pero con acople dipolar. • Se evidencia por la intensificacion de ciertas señales en el espectro cuando el equilibrio (poblaciones) de otros espines en las cercanias son alterados. Usamos un diagrama de de energia para un sistema de dos espines para explicarlo: • W representa la probabilidad de transicion, o la velocidad a la que cierta transicion sucede. Para el sistema en equilibrio podemos tener transiciones W1I y W1S, que representan procesos de un solo cuanto. • W0IS y W2IS son transiciones de cero y dos cuantos, que estan ‘prohibidas’ y tienen probabilidad mucho menor. αIαS (∗∗∗∗) (∗∗) αIβS βIβS () W1S W1S W1I W1I βIαS (∗∗) W2IS W0IS
- 23. Efecto nuclear Overhauser (continuado)Efecto nuclear Overhauser (continuado) • Las transiciones W1I y W1S estan relacionadas con la relajacion longitudinal (o espin-red). • Aca vemos que la relajacion por acople dipolar tiene lugar cuando los espines liberan energia en procesos que ocurren a frecuencia cercanas a ω = γ * Bo, que incluyen la reorientacion (translacion, rotacion) y colision de espines. • Ahora saturamos la transicion S, osea igualamos los dos niveles de energia. Las poblaciones de las transiciones de S son iguales: • Las transiciones W1S no son posibles (tenemos las mismas poblaciones en estos niveles), y las W1I no ocurren (no afectamos al equilibrio de este espin). Las transiciones W0IS y W2IS son la unica forma en que S se puede relajar. • Estas rutas de relajacion de S involucran transiciones de I, y por eso la señal de I intensifica. Si W2IS domina, tenemos intensificacion positiva de I, y si W0IS domina, negativa. W1S W1S W1I W1I W2IS W0IS αIαS (∗∗∗) (∗∗∗) αIβS βIβS (∗) βIαS (∗)
- 24. Efecto nuclear Overhauser (mas...)Efecto nuclear Overhauser (mas...) • W2IS y W0IS no se pueden detectar, pero afectan la forma en que el sistema de espines se relaja. Una ocurre a frecuencias cercanas al doble de ω, y la otra cerca a cero. Por ende, una esta relacionada con movimientos rapidos de la molecula, y la otra con movimientos muy lentos... • Si ponemos todo esto en una equacion grande (la ecuacion de Solomon) nos da algo que nos sirve para analizar al NOE en diferentes casos: • Primero, si la molecula se mueve/reorienta rapido (cosas de los organicos), vemos que si saturamos las transiciones de I W2IS va a dominar, y la inensificacion maxima para S es γI / γS. Si estamos mirando 13 C y desacoplando (saturando) los 1 H, tenemos un NOE teorico de ~ 4. • Si la molecula se mueve lento (proteinas), el W0IS domina y tenemos un NOE maximo de - γI / γS. Como aca estamos interesados en 1 H - 1 H, el NOE teorico maximo es ~ -1. W2IS - W0IS 2 * W1S + W2IS + W0IS η = γI / γS *
- 25. Efecto nuclear Overhauser (...y mas)Efecto nuclear Overhauser (...y mas) • Esto es todo en teoria, porque hay que acordarse que hay otros procesos de relajacion que ocurren a la misma vez. Los casos que estan ‘en el medio’ no son tan claros, y los veremos en otra ocasion. • Es util comparar la frecuencia del sistema de espines con la velocidad de reorientacion (‘tumbling’) de la molecula, o el tiempo de correlacion, τc. • ω * τc << 1 - La molecula se mueve rapido, y tenemos NOE’s positivos. Se le llama el ‘extreme narrowing limit’ (moleculas, chicas, solventes no-viscosos). • ω * τc >> 1 - La molecula se mueve lento, y tenemos NOE’s negativos. Se le llama el limite de difusion (diffusion limit - proteinas, solventes viscosos). • ω * τc ≈ 1 - Estos son los que estan ‘en el medio.’ Podemos tener situaciones en que el NOE es cero. Se da para moleculas de tamaño medio dependiendo de la frecuencia del RMN. • Hay una cosa importante que dejamos fuera por ahora. El NOE va a depender de la distancia entre los nucleos I y S.