
Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (20)
Ähnlich wie Microstructured Materials for Controlling the Pressure Response of Soft Optical Skins
Ähnlich wie Microstructured Materials for Controlling the Pressure Response of Soft Optical Skins (20)
Mehr von CK Harnett
Mehr von CK Harnett (6)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
Microstructured Materials for Controlling the Pressure Response of Soft Optical Skins
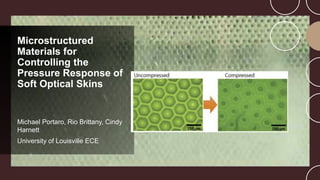
- 1. Microstructured Materials for Controlling the Pressure Response of Soft Optical Skins Michael Portaro, Rio Brittany, Cindy Harnett University of Louisville ECE
- 2. • Goal: map human-scale pressures at soft surfaces by inter-fiber optical coupling • Problem: finding fiber materials that meet both optical and mechanical requirements • Solution: A micromolded elastomer layer with pressure-tuned contact area • Methods: Fabrication, area-vs-force characterization, optical characterization in a “pressure refractometer” • Results: micro hemisphere array responds linearly to pressures in 0-2 psi range
- 3. Connections between soft optical sensors and haptics Soft optical sensors can measure & map: • human-generated forces for telehaptics • forces at prosthetics or at robotic manipulators for device- to-human haptic feedback • forces exerted by electromagnetic haptic arrays on skin, without electromagnetic interference Zhao et al., Science Robotics 2016 Reality Labs Research 2021 Yu et al., Nature 2019
- 4. Goal: map pressure in a soft optical network • Fiber-coupling methods give pressure location—for example, by scanning a grid. • Intensity of the cross-coupled light gives pressure amplitude. It depends on fiber crossing angle and fiber contact area. • Fibers with the right optical properties might not be soft enough to make good contact at the desired pressure range.
- 5. Fiber junctions filter for higher order modes Compared to low-order, straight- through modes, higher order modes: • “zig zag” more than low order modes • interact with the fiber surface more often • experience more attenuation • are more likely to get into the other fiber than lower order modes • travel more slowly
- 6. Time-of-flight of optical pulse contains spatial information • Path length differences of 1 mm can be discriminated • We can also measure amplitudes in multiple branches, if branch lengths differ by > 20 cm • Look at time of flight (TOF) for spatial information, and amplitudes for pressure, stretch and bending information Lin and Harnett, IEEE Sens. Lett. 2020
- 7. TOFPAD needs a more pressure-sensitive layer • Time-of-flight optical touchpad has soft urethane fibers embedded in silicone • Thin (125 micron) Teflon interlayer is a good optical cladding, but it isn’t elastomeric • TOFPAD is digital. There’s not much pressure information available here, it’s ON or OFF.
- 8. • Time-of-flight optical touchpad has soft urethane fibers embedded in silicone • Thin (125 micron) Teflon interlayer is a good optical cladding, but it isn’t elastomeric • TOFPAD is digital. There’s not much pressure information available here, it’s ON or OFF. TOFPAD needs a more pressure-sensitive layer
- 9. How about a microstructured elastomer layer?
- 10. Fabricating an elastomeric micro hemisphere array • Rowlux polycarbonate sheets are covered in lenticular arrays • Cast silicone on it (SmoothOn MoldStar 20T) and cure, then peel. • Apply mold release (10:1 mineral spirits:petroleum jelly) to the silicone. • Cast and cure optically clear silicone (SmoothOn Solaris) onto the silicone mold. Same shape as original But elastomeric and clear Original (side view) Replica (top view) 250 micron
- 11. Optical characterization in a “pressure refractometer” • Large diameter (1 mm) soft waveguides have multiple guided modes with a range of incidence angles • Need to examine how angle affects escape from the compressed cladding material to compare to ray optics simulations • Let’s measure transmission from 0 to 90 degree incidence Sensor Total internal reflection at 70 degrees for silicone slab (n=1.41) laser power meter sample semicircular glass prisms (n=1.55) Rio Brittany
- 12. Optical characterization in a “pressure refractometer” • Let’s also squeeze the sample and keep track of pressure during these experiments. Sensor Load cell calibration Translation stage Load cell Michael Portaro
- 13. Area-vs-force measurements • And let’s point a microscope camera at it • Contact area increases as pressure increases linearly from 0 to 3 PSI (0-20 kPa) • Voids collapse together at approximately 1.5 PSI (10 kPa), halfway through the video
- 14. More pressure = more contact area at laser spot
- 15. Optical transmission increases with pressure Transmitted Intensity (microWatts) Rotation angle (degrees) 300 250 200 150 100 50 0 0 10 20 30 40 50 60 1.9 PSI (~ 13 kPa) 0.5 PSI 1.5 PSI 1.1 PSI 0 PSI Glass-air critical angle 45 degrees 70 Glass-silicone critical angle 69 degrees Silicone Calculated transmission vs angle curve for each material Air
- 16. Optical transmission increases with pressure Transmitted Intensity (microWatts) Rotation angle (degrees) 300 250 200 150 100 50 0 0 10 20 30 40 50 60 1.9 PSI (~ 13 kPa) 0.5 PSI 1.5 PSI 1.1 PSI 0 PSI Glass-air critical angle 45 degrees 70 Glass-silicone critical angle 69 degrees 200 150 100 50 0 At 55 degree rotation angle Pressure (kPa) 0 2 4 6 8 10 12 14 16 2 PSI 1 PSI
- 17. To sum it up • Microstructured elastomer layer tunes the pressure response over 0-2 PSI range. • Further work: incorporate into TOFPAD application to increase pressure sensitivity range, study hysteresis and effect of contact shape Supported in part by NSF Awards 1849213 and 1935324