

Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (19)
Andere mochten auch
Andere mochten auch (20)
Ähnlich wie Control Multifrecuencia
Ähnlich wie Control Multifrecuencia (20)
Mehr von Jaime Martínez Verdú
Mehr von Jaime Martínez Verdú (20)
Control Multifrecuencia
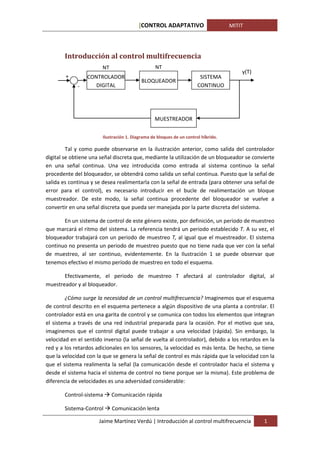
- 1. [CONTROL ADAPTATIVO MITIT Introducción al control multifrecuencia NT NT y(T) + CONTROLADOR SISTEMA BLOQUEADOR - DIGITAL CONTINUO MUESTREADOR Ilustración 1. Diagrama de bloques de un control híbrido. Tal y como puede observarse en la ilustración anterior, como salida del controlador digital se obtiene una señal discreta que, mediante la utilización de un bloqueador se convierte en una señal continua. Una vez introducida como entrada al sistema continuo la señal procedente del bloqueador, se obtendrá como salida un señal continua. Puesto que la señal de salida es continua y se desea realimentarla con la señal de entrada (para obtener una señal de error para el control), es necesario introducir en el bucle de realimentación un bloque muestreador. De este modo, la señal continua procedente del bloqueador se vuelve a convertir en una señal discreta que pueda ser manejada por la parte discreta del sistema. En un sistema de control de este género existe, por definición, un periodo de muestreo que marcará el ritmo del sistema. La referencia tendrá un periodo establecido T. A su vez, el bloqueador trabajará con un periodo de muestreo T, al igual que el muestreador. El sistema continuo no presenta un periodo de muestreo puesto que no tiene nada que ver con la señal de muestreo, al ser continuo, evidentemente. En la Ilustración 1 se puede observar que tenemos efectivo el mismo período de muestreo en todo el esquema. Efectivamente, el periodo de muestreo T afectará al controlador digital, al muestreador y al bloqueador. ¿Cómo surge la necesidad de un control multifrecuencia? Imaginemos que el esquema de control descrito en el esquema pertenece a algún dispositivo de una planta a controlar. El controlador está en una garita de control y se comunica con todos los elementos que integran el sistema a través de una red industrial preparada para la ocasión. Por el motivo que sea, imaginemos que el control digital puede trabajar a una velocidad (rápida). Sin embargo, la velocidad en el sentido inverso (la señal de vuelta al controlador), debido a los retardos en la red y a los retardos adicionales en los sensores, la velocidad es más lenta. De hecho, se tiene que la velocidad con la que se genera la señal de control es más rápida que la velocidad con la que el sistema realimenta la señal (la comunicación desde el controlador hacia el sistema y desde el sistema hacia el sistema de control no tiene porque ser la misma). Este problema de diferencia de velocidades es una adversidad considerable: Control-sistema Comunicación rápida Sistema-Control Comunicación lenta Jaime Martínez Verdú | Introducción al control multifrecuencia 1
- 2. [CONTROL ADAPTATIVO MITIT Supongamos que la señal de procedente de los elementos de lectura es N veces más lenta que la velocidad de generación de la señal por el sistema de control. Físicamente es imposible, sin embargo, nuestro PC sí que puede trabajar a un periodo de muestreo T. La solución basándose en las reglas clásicas, es adaptar el sistema al periodo más lento. Podríamos decir que esta es una solución clásica. Por otro lado, el control multifrecuencia lo que propone es diseñar el controlador de tal forma que se pueda aprovechar la velocidad de generación de control y que ésta no se vea menguada por la velocidad de lectura de los sensores, es decir, el periodo de muestreo del controlador y muestreador es distinto. Las técnicas multifrecuenciales permiten tener un periodo de muestreo distinto al de generación de la señal. Operadores de Kranc El primer conjunto de técnicas empleadas en control multifrecuencia están basadas en operadores de Kranc. En definitiva, estas técnicas son una forma de modelar un sistema multifrecuencia. Supongamos que disponemos de un sistema multifrecuencia completamente identificado. Esta técnica consiste en que este sistema sea transformado en un sistema monofrecuencia multivariable, es decir, con tantas variables como frecuencias deseen ser atendidas. En este caso, tendríamos N variables por cada N frecuencias disponibles en el sistema multifrecuencia. Esta técnica de Operadores de Kranc se caracteriza por ser un poco pesada y laboriosa por lo que no entra dentro de la asignatura. Técnicas algebraicas o basadas en modelo. Este otro conjunto de técnicas, igualmente laboriosas pero en menor medida, se conocen con el nombre de Técnicas algebraicas. En realidad, no es una técnica o estrategia concreta sino que son un conjunto o grupo de técnicas. A continuación, estudiaremos y analizaremos una de las más empleadas en investigación en ingeniería de control. La idea genera consiste en analizar el controlador digital y dividirlo en varias sub-partes, cada una de las cuales se encuentra trabajando a una frecuencia distinta de la del resto. El proceso se repite para diferentes frecuencias por lo que se diseñan varios a frecuencias de trabajo distintas. Posteriormente hay que enlazar estos controladores diseñados entre sí. Para ello, necesitaremos emplear conversores digital/digital. En definitiva, la idea general consiste es dividir el controlador digital en varios controladores cada uno actuando a una frecuencia distinta combinándolos posteriormente entre ellos. En la actualidad existen muchas técnicas multifrecuencia. Jaime Martínez Verdú | Operadores de Kranc 2
- 3. [CONTROL ADAPTATIVO MITIT Claro está que tenemos un problema vinculado a los tiempos de muestreo que intervienen en el sistema. ¿Existe alguna posibilidad a priori de resolver esta problemática? A continuación intentaremos resolverlo. Cancelación de polos y ceros Recordemos el concepto de un controlador PID. Se puede demostrar que el PID puede dividirse en dos grupos de acciones de diferentes velocidades, en efecto, dividiremos el controlador PID en las dos partes: Una de las dos partes es aquella que tiene una acción proporcional P y otra integral I. Esta parte sería la lenta. La otra de las dos partes es aquella que tiene una acción proporcional P y otra derivativa D. Esta parte sería la rápida. El actual informe se llevará a cabo el estudio de en ejemplo donde se empleará técnica de cancelación de polos y ceros. En esta técnica se diseñaba el controlador para obtener la función de transferencia M(z). El sistema con el que vamos a trabajar es: Ecuación 1 Este sistema vamos a controlarlo con un PID. La formula de un PID continuo es la siguiente: Ecuación 2 Como vamos a implementarlo en un ordenador hemos de discretizarlo. Existen varios métodos posibles de discretización. Por ejemplo, la utilizada a continuación: Ecuación 3 donde: Ecuación 4 Ecuación 5 Ecuación 6 Seleccionaremos como constantes KP = 8, TD = 0.2, TI = 3.2 y T = 0.1 s que son valores para los cuales el sistema se comporta de forma correcta. Una vez implementado el sistema es posible observar que debido a retardos en la red o el sistema sensorial. Por ello, sólo podemos trabajar a un periodo de muestreo NT = 0.3 (N = 3). Nos podemos conformar con 0.3 segundos. Jaime Martínez Verdú | Técnicas algebraicas o basadas en modelo. 3
- 4. [CONTROL ADAPTATIVO MITIT El código empleado es el siguiente: Kp=8; Td=0.2; Ti=3.2; T=0.1; N=3; NT=N*T; q0T=Kp*(1+Td/T); q1T=-Kp*(1-T/Ti+2*Td/T); q2T=Kp*Td/T; numgps=[1.5]; dengps=conv([1 0.5],[1 1.5]); gps=tf(numgps,dengps); grt=tf([q0T q1T q2T],[1 -1 0],T); q0NT=Kp*(1+Td/NT); q1NT=-Kp*(1-NT/Ti+2*Td/NT); q2NT=Kp*Td/T; grNt=tf([q0NT q1NT q2NT],[1 -1 0],NT); Los resultados obtenidos son: Ecuación 7 Ecuación 8 Ecuación 9 1.8 1.6 1.4 1.2 1 0.8 0.6 0.4 0.2 0 0 1 2 3 4 5 6 7 8 9 10 Ilustración 2. Gráfico resultante del sistema. Jaime Martínez Verdú | Técnicas algebraicas o basadas en modelo. 4
- 5. [CONTROL ADAPTATIVO MITIT grt gps Step LT I System5 Zero-Order LT I System1 Hold1 grNt gps Step2 LT I System6 Zero-Order LT I System3 Hold3 Ilustración 3. Esquema Simulink del sistema analizado. La salida azul es utilizando el PID rápido. La verde es utilizando el PID lento. La salida peor es la morada. En monofrecuencia, si la red no puede trabajar a menos de 0.3 hay que conformarse con la salida peor de ambas. Los métodos multifrecuenciales intentan controlar al sistema con una solución intermedia. La tendencia es ir al caso medio. Intentaremos aprovechar que nuestro PC es más rápido que la red para obtener mejores resultados. A continuación, explicaremos y demostraremos el algoritmo de control. Algoritmo de control multifrecuencia basado en modelo Las entradas al algoritmo son las siguientes. Modelo del sistema, Gp(s). Modelo de referencia del sistema controlado, M(s). Si recordamos, al plantear el PID anterior, en realidad se han discretizado dos PID’s, esta función de transferencia M(s) es la función que se obtiene al colocar delante del modelo del sistema un bloque PID continuo y por detrás de Gp(s) cerramos el bucle mediante una realimentación negativa. La función de transferencia resultante de esta combinación es M(s). Se ha conseguido diseñar un PID continuo de manera que el sistema se comporta del modo que deseemos, es decir, podemos determinar cómo queremos que se comporte el sistema en bucle cerrado. La referencia de entrada. En nuestro caso, consideraremos un escalón como señal de referencia. Por último, los dos períodos de muestreo que forman parte en el sistema: El periodo de muestreo lento y el más rápido. o El periodo de muestreo rápido es el período de actualización de las señal de control que hemos denominado T. En definitiva, determina a que velocidad opera el controlador. o El periodo de muestreo lento es aquel referente a los elementos que están incluidos en la realimentación (NT). Jaime Martínez Verdú | Técnicas algebraicas o basadas en modelo. 5
- 6. [CONTROL ADAPTATIVO MITIT Hasta este punto del desarrollo, todo lo estudiado es necesario para poder diseñar el esquema de control deseado. Sin embargo, disponemos únicamente de elementos continuos, un sistema continuo GP(s), y entrada y salidas continuas. Seguiremos una notación específica, puesto que el sistema es bifrecuencia, a la salida la denominaremos yDR(s) que viene del vocablo inglés dual rate, en español bifrecuencia. Emplearemos la variable GR para designar al regulador, y puesto que actuara a dos frecuencias lo designaremos como GRT,NT, por ser regulador bifrecuencia. La señal que sale del regulador es una señal UT y opera bajo el ritmo de un período T. Posteriormente, se instala en el esquema un bloqueador especial que está planteado para reguladores multifrecuencia HT(s). La señal realimentada sólo puede muestrearse a período T, por ello la existencia en la realimentación de un muestreador. A la salida del muestreador se dispone de la señal YTDR. Posteriormente el esquema dispone de la operación skipN, que selecciona, a periodo T, un elemento de cada N elementos de la secuencia. Imaginemos una gráfica con período T, una operación de skip3 provoca que de cada 3 elementos almacena uno de la secuencia, es decir, selecciona uno de la secuencia y omite los otros 2. En el programa Simulink esta operación se realiza mediante un bloque que se denomina DownSample. La señal obtenida a la salida de este bloque viene denominada como [YTDR]NT. Evidentemente, la referencia vendrá a período NT, de igual modo que el error. El controlador GRT,NT en realidad está formado por una serie de bloques que vienen desarrollados a continuación: La señal de error entra como entrada al bloque G1NT de donde se obtiene una señal parcial denominada U1NT. Posteriormente, está dispuesto un operador inverso denominado en Simulink UpSample. Con este bloque se logra que, a partir de una señal a período NT, se obtenga otra señal a período T [U1NT]T. En este caso, por cada período T rellena los huecos de la señal con ceros, como si fuera un rellenador de ceros. Finalmente, existe dispuesto el bloque G2T de donde se obtiene como salida la señal UT. Parte lenta del regulador: Ecuación 10 Parte rápida del regulador: Ecuación 11 HT=RT/[RNT]T Bloqueador bifrecuencia Ecuación 12 Se puede demostrar que el comportamiento del sistema conformado por G1(s) G2(s) y H(s) será aquel que siga M(s). Será un comportamiento intermedio entre el lento y el rápido. Jaime Martínez Verdú | Técnicas algebraicas o basadas en modelo. 6
- 7. [CONTROL ADAPTATIVO MITIT A continuación, se desarrolla el programa para el control: ht=tf([1 0 0 -1],[1 -1 0 0],T); /*Conversor de frecuencia*/ /*Cálculo de M(s)*/ numba=conv(numgps,[Kp*Td Kp Kp/Ti]); denba=conv(dengps,[1 0]); ms=feedback(tf(numba,denba),1); /*Extraemos numerador y denominador ms para trabajar con ellos*/ numms=ms.num{1}; denms=ms.den{1}; /*Discretizo M(s) a period NT*/ [numnt dennt]=c2dm(numms,denms,NT,'zoh'); mnt=tf(numnt,dennt,NT) /*Calculamos la parte rápida del contador*/ G1nt=1/(1-mnt); [numt dent]=c2dm(numms,denms,T,'zoh'); mt=tf(numt,dent,T); [numgpt dengpt]=c2dm(numgps,dengps,T,'zoh'); gpt=tf(numgpt,dengpt,T); 1.8 1.6 1.4 1.2 1 0.8 0.6 0.4 0.2 0 0 1 2 3 4 5 6 7 8 9 10 Ilustración 4. Gráfico resultante del control. Comparativa de los sistemas. Jaime Martínez Verdú | Técnicas algebraicas o basadas en modelo. 7
- 8. [CONTROL ADAPTATIVO MITIT Ilustración 5. Comparativa de los sistemas. Referencias 1. Vélez C.M., Salt J. (1998). Métodos, conceptos y perspectivas del diseño de controladores multifrecuencia. VIII Congreso Latinoamericano de Control Automático. Vol. 2, pp. 541-546. 2. Vélez C.M., Salt J. (1999). Simulation of multirate control systems in Matlab/Simulink. Second World Manufacturing Congress, pp. 84-90. 3. Vélez C. M., Salt J. (2000). Simulation of irregular multirate systems. 8th IFAC Symposium on Computer Aided Control System Design 4. Vélez C.M. (2001). Modelado y simulación de sistemas con muestreo no convencional. Tesis doctoral. Departamento de Ingeniería de Sistemas y Automática (DISA), Universidad Politécnica de Valencia. 5. Vélez C.M. (2002). Modelado, simulación y control de sistemas con muestreo no convencional. Revista EAFIT, No. 125, pp 9-20. 6. Vélez C.M. (2003a). Diseño e implementación de sistemas de control con muestreo no convencional. Informe de investigación 2002. Universidad EAFIT. 7. Vélez, C.M. (2003b). Multirate Control Toolbox para Matlab/Simulink. 8. Vélez C. M. (2003c). Control multifrecuencia en tiempo real. Revista Universidad EAFIT, 39, No. 132, pp 23-32 9. Vélez C. M., Álvarez J. (2003d). Control multifrecuencia de un motor de corriente continua. V Congreso de la ACA Jaime Martínez Verdú | Referencias 8
- 9. [CONTROL ADAPTATIVO MITIT Tabla de contenidos Introducción al control multifrecuencia........................................................................................ 1 Operadores de Kranc..................................................................................................................... 2 Técnicas algebraicas o basadas en modelo. .................................................................................. 2 En la actualidad existen muchas técnicas multifrecuencia. .......................................................... 2 Cancelación de polos y ceros ....................................................................................... 3 Algoritmo de control multifrecuencia basado en modelo ........................................... 5 Referencias .................................................................................................................................... 8 Tabla de contenidos ...................................................................................................................... 9 Tabla de ilustraciones.................................................................................................................. 10 Tabla de ecuaciones .................................................................................................................... 11 Jaime Martínez Verdú | Tabla de contenidos 9
- 10. [CONTROL ADAPTATIVO MITIT Tabla de ilustraciones Ilustración 1. Diagrama de bloques de un control híbrido. .......................................................... 1 Ilustración 2. Gráfico resultante del sistema. ............................................................................... 4 Ilustración 3. Esquema Simulink del sistema analizado. ............................................................... 5 Ilustración 4. Gráfico resultante del control. Comparativa de los sistemas. ................................ 7 Ilustración 5. Comparativa de los sistemas. .................................................................................. 8 Jaime Martínez Verdú | Tabla de ilustraciones 10
- 11. [CONTROL ADAPTATIVO MITIT Tabla de ecuaciones Ecuación 1 ........................................................................... 3 Ecuación 2 ........................................................ 3 Ecuación 3 .............................................................. 3 Ecuación 4.......................................................................... 3 Ecuación 5 ....................................................................... 3 Ecuación 6 .......................................................................... 3 Ecuación 7 .......................................................................... 4 Ecuación 8 ......................................................... 4 Ecuación 9 ................................................. 4 Ecuación 10 ............................................................................... 6 Ecuación 11 .................................................................................... 6 Ecuación 11 ....................................................................................... 6 Jaime Martínez Verdú | Tabla de ecuaciones 11