A BIOBJECTIVE MODEL FOR PRODUCTION PLANNING IN A CEMENT FACTORY: Non-preemptive Goal Programming Approach
•
3 gefällt mir•2,408 views

A BIOBJECTIVE MODEL FOR PRODUCTION PLANNING IN A CEMENT FACTORY: Non-preemptive Goal Programming Approach APPLIED MATHEMATICAL PROGRAMMING Industrial and Production Engineering FACULTY OF TECHNOLOGY UNIVERSITY OF IBADAN

Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (20)
Andere mochten auch
Andere mochten auch (20)
Ähnlich wie A BIOBJECTIVE MODEL FOR PRODUCTION PLANNING IN A CEMENT FACTORY: Non-preemptive Goal Programming Approach
Ähnlich wie A BIOBJECTIVE MODEL FOR PRODUCTION PLANNING IN A CEMENT FACTORY: Non-preemptive Goal Programming Approach (20)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
A BIOBJECTIVE MODEL FOR PRODUCTION PLANNING IN A CEMENT FACTORY: Non-preemptive Goal Programming Approach
- 1. AKINOLA D. T. 145365 A TERM PAPER on A BIOBJECTIVE MODEL FOR PRODUCTION PLANNING IN A CEMENT FACTORY: Non-preemptive Goal Programming Approach GROUP 2 AKINOLA DAMILOLA T. 145365 500 LEVEL Submitted to: Dr. A. Adeyeye TIE 513 (APPLIED MATHEMATICAL PROGRAMMING) Industrial and Production Engineering FACULTY OF TECHNOLOGY UNIVERSITY OF IBADAN MAY, 2013. 0
- 2. AKINOLA D. T. 145365 TABLE OF CONTENTS Abstract 1. Introduction 1.1 1.2 Statement of problem 1.3 2. Background information Objectives of study Literature review 2.1 2.2 Non-preemptive goal programming 2.3 Previous works on non-preemptive goal programming 2.4 3. Goal programming Lingo 13 Methodology of study 3.1 4. Brief description of the non-preemptive goal programming approach Model Application 4.1 4.2 Optimization model 4.3 Case under study: Minimization of manufacturing cost and maximization of capacity utilization 4.4 The approach of Non-preemptive goal programming 4.5 5. Process description The complete Lingo 13 model Discussion of results and conclusion List of tables List of figures References 1
- 3. AKINOLA D. T. 145365 ABSTRACT In order to derive values for input variables in a cement factory system, this study introduces the application of non-preemptive goal programming to determining the optimal allocation of production materials to the major production facilities. The system under consideration is a cement factory in which there are two conflicting major objectives: minimization of manufacturing cost and maximization of capacity utilization. The methodology and application are such that they can generally be applied to other system. The obtained values after solving the resulting program give valid values. 2
- 4. AKINOLA D. T. 145365 1. INTRODUCTION 1.1. BACKGROUND INFORMATION Large scale systems, and in particular industrial systems, are sources of multi-objective optimization solutions. For example, a factory may wish to find the optimal allocation of products to the different market locations that simultaneously provides for high profit and big market share. Or a manufacturing organization may simultaneously aspire for the specific objectives of each department such as cost minimization for the budget department, production maximization and production time minimization for the production department, and product quality maximization for the quality control department. A particular decision making situation that this paper deals with is that of a cement factory in Thailand. The management is supposedly promoting two objectives - minimization of manufacturing cost and maximization of capacity utilization - of the factory (Pakorn and Mario, 1978). 1.2. STATEMENT OF PROBLEM Usually, there are optimal situations in which there are more than one objective in real life. They are easier solved when reduced to single objective approximation because of the complexity of the solution procedure in obtaining satisfactory results (Pakorn and Mario, 1978). The problem of this study is that of finding a compromise set of variable values that optimally attain the desired goals of the company, even though they are conflicting. 1.3. OBJECTIVES OF STUDY The objectives of this study are to use the approach of non-preemptive goal programming regarding the optimal allocation of production materials to the major production facilities in a cement factory. These can be split into four objectives (1) Describe the approach of non-preemptive goal programming, (2) Formulate the linear model using non-preemptive goal programming, (3) Write the Lingo 13 form of the model, and (4) Obtain values for input variables in a cement factory system to determine the optimal allocation of production materials to the major production facilities. 3
- 5. AKINOLA D. T. 145365 2. 2.1. LITERATURE REVIEW GOAL PROGRAMMING In real life, virtually all problems have several objectives, not just one. For example, if a manufacturing company concentrates solely on cost containment, it might neglect the environmental or social concerns of the community it serves: If a health care company concentrates solely on top-quality health care, its owners’ profit could be slighted. If a publishing company puts too much emphasis on developing an error-free textbook, the amount of time spent reviewing a potential text might push the publishing date beyond that required for adoptions. In short, finding optimal solutions to a model formulated with a single objective can seriously affect other aspirations and goals that are important to an organization (FEG, 2013). A goal programming model seeks to simultaneously take into account several objectives or goals that are of concern to a decision maker. While a linear programming model consists of constraints and a single objective function to be maximized or minimized, a goal programming model consists of constraints and a set of goals that are prioritized in some sense. In both linear and goal programming problems, if the constraints are inconsistent, there are no feasible solutions for the model In goal programming, however, one can expect that although there is a set of feasible solutions satisfying the constraints, none of them may simultaneously satisfy all the conflicting goals of the organization. The objective of goal programming is to find a solution that satisfies the true constraints and comes closest to meeting the stated goals (FEG, 2013). Goal programming approaches analyze how much a proposed solution deviates from each stated goal. Accordingly, for each goal a pair of deviation variables are defined (one equaling the amount by which the solution overachieves the goal; the other equaling the amount by which it fails to meet the goal). The basic approach of goal programming is to establish a specific numeric goal for each of the objectives, formulate an objective function for each objective, and then seek a solution that minimizes the (weighted) sum of deviations of these objective functions from their respective goals. There are three possible types of goals: 1. A lower, one-sided goal sets a lower limit that we do not want to fall under (but exceeding the limit is fine). 2. An upper, one-sided goal sets an upper limit that we do not want to exceed (but falling under the limit is fine). 3. A two-sided goal sets a specific target that we do not want to miss on either side (Jayant, 2004). 4
- 6. AKINOLA D. T. 145365 2.2. NON-PREEMPTIVE GOAL PROGRAMMING In non-preemptive goal programming, the quality characteristics/responses are presumed to be of roughly comparable importance. Since it is not possible to achieve all the goals because of their conflicting nature, there will be deviations from their target values for all or some of the responses. These deviations are unwanted and therefore, they should be minimized. The unwanted deviations are assigned weights according to their relative importance to the designer and minimized as an Archimedian sum. The basic procedures in are to establish goals with roughly same importance, assign weights to goals and construct a single objective function to minimize the weighted sum of deviations from goals (FEG, 2004). 2.3. PREVIOUS WORKS ON NON-PREEMPTIVE GOAL PROGRAMMING CASE 1: Dewright Company Example A case titled the Dewright Company Example is presented here. It shows how the Nonpreemptive Goal Programming approach was applied in an untitled Linear Goal Programming educational release available on FEG libraries. PROBLEM The Dewright Company is considering three new products to replace current models that are being discontinued, so their OR department has been assigned the task of determining which mix of these products should be produced. Management wants primary consideration given to three factors: longrun profit, stability in the workforce, and the level of capital investment that would be required now for new equipment. In particular, management has established the goals of (1) achieving a long-run profit of at least $125 million from these products, (2) maintaining the current employment level of 4000 employees, and (3) holding the capital investment to less than $55 million. However, management realizes that it probably will not be possible to attain all these goals simultaneously, so it has discussed priorities with the OR department. This discussion has led to setting penalty weights of 5 for missing the Figure 1: Contributions per unit rate of production 5
- 7. AKINOLA D. T. 145365 profit goal (per $1 million under), 2 for going over the employment goal (per 100 employees), 4 for going under this same goal, and 3 for exceeding the capital investment goal (per $1 million over). Each new product’s contribution to profit, employment level, and capital investment level is proportional to the rate of production. These contributions per unit rate of production are shown in the following table, along with the goals and penalty weights. SOLUTION Decision variables x1: production rate of product 1 x2: production rate of product 2 x3: production rate of product 3 Three goals Profit goal: 12 x1 + 9 x2 + 15 x3 ≥ 125 (lower one-sided goal) Employment goal: 5 x1 + 3 x2 + 4 x3 = 40 (two-sided goal) Investment goal: 5 x1 + 7 x2 + 8 x3 ≤ 55 (upper one-sided goal) Objective function: Min Z = 5(12 x1 + 9 x2 + 15 x3 – 125)+ 2(5 x1 + 3 x2 + 4 x3 – 40)+ + 4(5 x1 + 3 x2 + 4 x3 – 40)+ 3(5 x1 + 7 x2 + 8 x3 – 55)+ where 6
- 8. AKINOLA D. T. 145365 To put into a proper LP form Let y1 = 12 x1 + 9 x2 + 15 x3 – 125 y2 = 5 x1 + 3 x2 + 4 x3 – 40 y3 = 5 x1 + 7 x2 + 8 x3 – 55 and y1 = y1+ - y1- and y1+ ≥ 0, y1- ≥ 0 y2 = y2+ - y2- and y2+ ≥ 0, y2- ≥ 0 y3 = y3+ - y3- and y3+ ≥ 0, y3- ≥ 0 Final LP for non-preemptive goal programming: Min Z = 5 y1- + 2 y2+ + 4 y2- + 3 y3+ subject to 12 x1 + 9 x2 + 15 x3 – (y1+ - y1- ) = 125 5 x1 + 3 x2 + 4 x3 – (y2+ - y2- ) = 40 5 x1 + 7 x2 + 8 x3 – (y3+ - y3- ) = 55 xi, yi+, yi- ≥ 0 i=1,2,3 Optimal solution: x1 = 25/3 x2 = 0 x3 = 5/3 y1+ = y1- = 0 → y1 = 0 → 1st goal is satisfied y2+ = 25/3, y2- = 0 → y2 = 25/3 → 2nd goal exceeds employment level by 25/3 hundred employees y3+ = y3- = 0 → y3 = 0 → 3rd goal is satisfied CASE 2: Camyo Manufacturing Example PROBLEM Another case presented is the Camyo Manufacturing Example. Camyo Manufacturing produces four parts that require the use of a lathe and a drill press. The two machines operate 10 hours a day. The following table provides the time in minutes required by each part: 7
- 9. AKINOLA D. T. 145365 TABLE 1: Time in minutes required by each part It is desired to balance the use of the two machines by requiring the difference between their total operation times not to exceed 30 minutes. The market demand limits the number of units produced of each part to at least 10 units. Additionally, the number of units of part 1 may not exceed that of part 2 It is desired to balance the use of the two machines by requiring the difference between their total operation times not to exceed 30 minutes. The market demand limits the number of units produced of each part to at least 10 units. Additionally, the number of units of part 1 may not exceed that of part 2. SOLUTION Decision variables xi = number of parts produced per day of type i, i=1, 2, 3, 4 Operation time goal: Difference between the time on machine 1 (lathe) and time on machine 2 (drill press) is not to exceed 30 minutes: |time1 – time2| ≤ 30 -30 ≤ time1 – time2 ≤ 30 time1 = 5 x1 + 6 x2 + 4 x3 + 7 x4 lathe time2 = 3 x1 + 2 x2 + 6 x3 + 4 x4 drill press -30 ≤ (5 x1 + 6 x2 + 4 x3 + 7 x4) – (3 x1 + 2 x2 + 6 x3 + 4 x4) ≤ 30 -30 ≤ 2 x1 + 4 x2 - 2 x3 + 3 x4 ≤ 30 Final LP for non-preemptive goal programming: Min Z = y1+ + y2subject to 8
- 10. AKINOLA D. T. 145365 5 x1 + 6 x2 + 4 x3 + 7 x4 ≤ 600 lathe, 600 min in a day 3 x1 + 2 x2 + 6 x3 + 4 x4 ≤ 600 drill press, 600 min a day x1 x2 x3 x4 x1 - x2 2 x1 + 4 x2 - 2 x3 + 3 x4 – (y1+ - y1-) 2 x1 + 4 x2 - 2 x3 + 3 x4 ≥ 10 ≥ 10 ≥ 10 ≥ 10 ≤0 = 30 time1 - time2 ≤ 30 – (y2+ - y2-) = -30 time1 - time2 ≥ -30 xi ≥ 0, i=1, 2, 3, 4 yi+ ≥ 0, yi- ≥ 0, i=1, 2 2.4. LINGO 13 LINGO is a simple tool for utilizing the power of linear and nonlinear optimization to formulate large problems concisely, solve them, and analyze the solution. Optimization helps you find the answer that yields the best result; attains the highest profit, output, or happiness; or achieves the lowest cost, waste, or discomfort. Often these problems involve making the most efficient use of your resources— including money, time, machinery, staff, inventory, and more. Optimization problems are often classified as linear or nonlinear, depending on whether the relationships in the problem are linear with respect to the variables (Lindo, 2012). LINGO is a comprehensive tool designed to make building and solving mathematical optimization models easier and more efficient. LINGO provides a completely integrated package that includes powerful language for expressing optimization models, a full-featured environment for building an editing problems, and a set of fast built-in solvers capable of efficiently solving most classes of optimization models. LINGO's primary features include: ALGEBRAIC MODELING LANGUAGE LINGO supports a powerful, set-based modeling language that allows users to express math programming models efficiently and compactly. Multiple models may be solved iteratively using LINGO's internal scripting capabilities. CONVENIENT DATA OPTIONS LINGO takes the time and hassle out of managing your data. It allows you to build models that pull information directly from databases and spreadsheets. Similarly, LINGO can output solution information 9
- 11. AKINOLA D. T. 145365 right into a database or spreadsheet making it easier for you to generate reports in the application of your choice. Complete separation of model and data enhance model maintenance and scalability. MODEL INTERACTIVELY OR CREATE TURNKEY APPLICATIONS You can build and solve models within LINGO, or you can call LINGO directly from an application you have written. For developing models interactively, LINGO provides a complete modeling environment to build, solve, and analyze your models. For building turn-key solutions, LINGO comes with callable DLL and OLE interfaces that can be called from user written applications. LINGO can also be called directly from an Excel macro or database application. LINGO currently includes programming examples for C/C++, FORTRAN, Java, C#.NET, VB.NET, ASP.NET, Visual Basic, Delphi, and Excel (Lindo, 2012).. POWERFUL SOLVERS AND TOOLS LINGO is available with a comprehensive set of fast, built-in solvers for linear, nonlinear (convex & nonconvex), quadratic, quadratically constrained, and integer optimization. You never have to specify or load a separate solver, because LINGO reads your formulation and automatically selects the appropriate one. A general description of the solvers and tools available in LINGO follows General Nonlinear Solver LINGO provides both general nonlinear and nonlinear/integer capabilities. The nonlinear license option is required in order to use the nonlinear capabilities with LINDO API. Global Solver The global solver combines a series of range bounding (e.g., interval analysis and convex analysis) and range reduction techniques (e.g., linear programming and constraint propagation) within a branch-andbound framework to find proven global solutions to nonconvex nonlinear programs. Traditional nonlinear solvers can get stuck at suboptimal, local solutions. This is no longer the case when using the global solver. Multistart Solver The multistart solver intelligently generates a sequence of candidate starting points in the solution space of NLP and mixed integer NLPs. A traditional NLP solver is called with each starting point to find a local optimum. For non-convex NLP models, the quality of the best solution found by the multistart solver tends to be superior to that of a single solution from a traditional nonlinear solver. A user adjustable parameter controls the maximum number of multistarts to be performed. 10
- 12. AKINOLA D. T. 145365 Simplex Solvers LINGO offers two advanced implementations of the primal and dual simplex methods as the primary means for solving linear programming problems. Its flexible design allows the users to fine tune each method by altering several of the algorithmic parameters. Mixed Integer Solver The mixed integer solver’s capabilities of LINGO extend to linear, quadratic, and general nonlinear integer models. It contains several advanced solution techniques such as cut generation, tree reordering to reduce tree growth dynamically, and advanced heuristic and presolve strategies. Stochastic Solver The stochastic programming solver supports decision making under uncertainty through multistage stochastic models with recourse. The user describes the uncertainty by identifying the distribution functions, either built-in or user-defined, describing each random variable. The stochastic solver will optimize the model to minimize the cost of the initial stage plus the expected cost of future recourse actions over the planning horizon. Advanced sampling modes are also available for approximating continuous distributions. LINGO's stochastic solver also supports chance-constrained models, where one or more sets of constraints are allowed to be violated according to a specified probability. Model and Solution Analysis Tools LINGO includes a comprehensive set of analysis tools for debugging infeasible linear, integer and nonlinear programs, using advanced techniques to isolate the source of infeasibilities to the smallest subset of the original constraints. It also has tools to perform sensitivity analysis to determine the sensitivity of the optimal basis to changes in certain data components (e.g. objective vector and righthand-size values). Quadratic Recognition Tools The QP recognition tool is a useful algebraic pre-processor that automatically determines if an arbitrary NLP is actually a convex, quadratic model. QP models may then be passed to the faster quadratic solver, which is available as part of the barrier solver option. When the barrier solver option is combined with the global option, LINGO will automatically recognize conic models, in addition to convex quadratic models. Linearization Tools Linearization is a comprehensive reformulation tool that automatically converts many non-smooth functions and operators (e.g., max and absolute value) to a series of linear, mathematically equivalent expressions. Many non-smooth models may be entirely linearized. This allows the linear solver to quickly find a global solution to what would have otherwise been an intractable nonlinear problem (Lingo, 2012). 11
- 13. AKINOLA D. T. 145365 3. METHODOLOGY OF STUDY In non-preemptive goal programming, the quality characteristics/responses are presumed to be of roughly comparable importance. Since it is not possible to achieve all the goals because of their conflicting nature, there will be deviations from their target values for all or some of the responses. These deviations are unwanted and therefore, they should be minimized. The unwanted deviations are assigned weights according to their relative importance to the problem designer or formulator and minimized as an Archimedian sum (Ademola and Festus, 2010). 3.1. BRIEF DESCRIPTION OF PROGRAMMING APPROACH THE NON-PREEMPTIVE GOAL Any bi-objective mathematical programming problem may be formulated as to Maximize: Z1 = f1(x), Z2 = f2(x) (1) (2) subject to: gi(x) < bi i = 1, 2, .......m, (3) x>0 (4) where x is a vector of n decision variables, bi (i = 1, 2, ...., m) are constants, and f1, f2 and gi (i = 1, 2, ...., m) are function notations. For the above problem to be called "bi-objective" in the mathematical programming parlance, objectives z1 and z2 have to be conflicting. by conflicting, it is meant that the satisfaction of one precludes or impairs the other. The specific steps the designer may follow are as follows: Step 1: Establish the desired target levels (2.L, &U) for each of the responses quality characteristics. (e.g. acicular ferrite > 50 %. oxygen content is 240 Lt and diffusible hydrogen content < 8 mL per 100 g). Step 2: Assign weights to each response and their respective negative (n,) and positive (p,) deviations Step 3: Construct the goal constraints of the problem. The goal constraint is usually given by; f(x) + n, — p, = T , L , or U for each I E l Step 4: Construct the achievement function of each response as illustrated in the table on the next page Step 5: Construct the overall achievement function and add the goal constraints to the structural constraints of the problem. The complete non preemptive goal programming model of the problem may be stated as: (It is not possible to have both p and n together for any response i). The weights , u and v take the value zero if the minimization of the corresponding deviational variable is not important to the designer. 12
- 14. AKINOLA D. T. 145365 TABLE 2: Step 6: Solve the model in step 5. 13
- 15. AKINOLA D. T. 145365 4. MODEL APPLICATION 4.1. PROCESS DESCRIPTION The manufacturing process of a cement factory can be generally considered as composed of three major stages, namely: Quarrying and raw materials blending; Reaction or burning stage in a rotary kiln; Milling of kiln clinker. For the factory under consideration, the raw materials used consist of marl, clay, and 25% red earth. Because of the softness of the raw materials, the wet process is employed. These raw materials are crushed, milled and blended in two stages-coarse and fine milling operations-to form an intimate mix. The subsequent reaction is influenced by the degree of final milling, which is called the milling of slurry, together with the homogeneity of the blend as well as by its chemical composition. As the process employed is wet, milling takes place in the presence of large quantity of water making the final raw material, called slurry, contain about one-third of its weight as water. The raw material in the form of slurry is then upper, cooler end of the kiln by means of a feed control device. During its passage down the kiln, the slurry undergoes a series of physical and chemical changes. The reactions are complex, a smaller amount of reaction taking place in the liquid state. Clinker from the kiln falls on to a grate cooler which is fed by air from the secondary air fan. The last stage of the process involves the reduction of the kiln product to the finely divided final product, now called cement. In the milling operation, a desired proportion of gypsum is added. Gypsum is used to act as retarder for cement setting. Cement output (unpacked) is stored in the cement silos. TABLE 3: 14
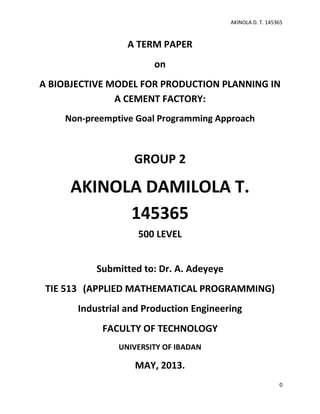
- 16. AKINOLA D. T. 145365 The table above presents the major production facilities with their corresponding maximum capacities. 4.2. OPTIMIZATION MODEL The amount of material inputted to each major production facility (xj, j = 1,..., n) are chosen as decision variables in this optimization model. The model is developed in monthly production planning basis. Two essential sets of constraints are considered: Balance equations of materials throughout the process; Available capacity of production facilities. 4.2.1. MATERIAL BALANCE CONSTRAINTS Material balance constraints represent balance equations due to the loss and addition of materials in the process. The balance equations, which consist of marl loss, slurry loss, maximum marl output (160,000 tons/month, established by management as caused by raw material constraint), maximum slurry output (200,000 tons/month,…), loss due to the evolution of carbon dioxide in converting slurry to clinker, and the addition of gypsum in the milling stage, are briefly summarized as follows; At marl quarrying section, about 30% of marl is lost due to the coarse milling operation of raw mill 1. About 1% loss of slurry is found in the coarse slurry milling operation of slurry Raw mill 1. In converting slurry to clinker, 37.5% decrease in its weight is usually found due to the evolution of carbon dioxide from limestone. Chemical transportation of the burning stage is CaCO3 ht CaO + CO2 At milling section, 5% weight of material is increased due to the addition of gypsum. Figure 2 gives the process flow diagram showing the amounts of material (by weight) inputted to each facility as well as the incurred losses. The junction “business” is introduced for convenience and to help clarify the process flow diagram. With the aid of Fig. 2, the material balance constraints can now be formulated. Maximum marl and slurry output, 0.7X₁ = 160,000 (5) = 200,000 (6) X₄ + X₅ Raw material proportions, 0.175X₁ + 0.25X₂ - 0.75X₃ =0 (7) 15
- 17. AKINOLA D. T. 145365 Material balance at node c, 0.693X₁ + 0.99X₂ +0.99X₃ + X₄ + X₅ =0 (8) =0 (9) Material balance at junction 1, X₄ + X₅ - X₆ - X₇ - X₈ - X₉ - X₁₀ Material balance at junction 2, 0.625X₆ + 0.625X₇ + ……..+0.625X₁₀ - X₁₁ - X₁₂ -……-X₁₆ =0 (10) =0 (11) Material balance at junction 3, 1.05X₁₁ + 1.05X₁₂ +…. + 1.05 X₁₆ - X₁₇ - X₁₈ - ……. - X₂₅ 4.2.2. CAPACITY CONSTRAINTS Capacity constraints are based on the total amount of input materials as losses are not incurred at the beginning of the process. The following constraints are developed with the aid of Fig. 2 and Table 1 X₁ 0.7 X₁ 0.7 X₁ + X₂ + X₃ X₄ X₅ X₆ X₇ X₈ X₉ X₁₀ 1.05 X₁₁ 1.05 X₁₂ 1.05 X₁₃ 1.05X₁₄ 1.05X₁₅ 1.05X₁₆ X₁₇ X₁₈ X₁₉ X₂₀ X₂₁ X₂₂ X₂₃ X₂₄ X₂₅ ≤ 315,000 ≤ 189,000 ≤ 252,000 ≤ 94,000 ≤ 157,500 ≤ 15,000 ≤ 15,000 ≤ 15,000 ≤ 15,000 ≤ 60,000 ≤ 11,860 ≤ 22,050 ≤ 22,050 ≤ 22,050 ≤ 22,050 ≤ 22,050 ≤ 38,000 ≤ 38,000 ≤ 87,000 ≤ 87,000 ≤ 70,000 ≤ 70,000 ≤ 4,000 ≤ 4,000 ≤ 4,000 (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) 16
- 18. AKINOLA D. T. 145365 X₁ ₁ a x₀ 1 0.3x₁ 0.7x₁ b x₂ (clay) 0.7x₁ c 0.007x₁+0.01x₂+0.01x₃ x₄ x₅ x₃ (Red Earth) d e Junction x₁₀ j 0.375x₁₀ x₉ h i 0.375x₉ x₆ x₇ x₈ 1 g f 0.375x₆ 0.375x₇ 0.375x₈ Junction 2 x₁₆ p 0.05x₁₆ x₁₄ x₁₅ o 0.05x₁₅ x₁₂ x₁₃ n x₁₁ l m 0.05x₁₃ 0.05x₁₄ k 0.05x₁₁ 0.05x₁₂ Junction3 x₂₅ x₂₄ y₀ ₀ x₂₃ x₂₂ x w v x₁₇ x₂₁ u x₂₀ t x₁₉ x₁₈ s r q Junction 4 Figure. 2. Process flow diagram of cement manufacturing Each node of Fig. 2 corresponds to a constraint in the above set. 17
- 19. AKINOLA D. T. 145365 The existing management decision is to utilize the full capacity of the factory. Figure 3 shows that in the existing design the bottleneck is in the burning section. The full capacity of this section also bears the label of being the maximum capacity of the factory; thus production is only constrained to, at most, equal this amount at the burning stage: X₆ + X₇ + X₈ + X₉ + X₁₀ = 120,000 Addressed to the problems of the firm, management responsible for the firm’s survival are optimizing certain objectives in their response to numerous factors that shape the firm. 4.3. CASE UNDER STUDY: MINIMIZATION OF MANUFACTURING COST AND MAXIMIZATION OF CAPACITY UTILIZATION When management decides not to ignore any one of the above objectives, the decision making becomes a bi-criterion case. Thus the bi-objectives are: Minimize: Z1 = 0.424 1+0.22 2+0.22 3+0.1 4+0.1 5+ 6 +0.9 7+1.2 8+1.1 9+ 10+0.179 11+ 0.137 12 +0.12 13+0.168 14+0.137 15+0.126 16+0.121 17 +0.121 18+0.123 19+0.122 20+0.122 21+0.120 22 +0.120 23+0.120 24+0.120 25 Maximize: Z 2 0.965 x1 0.397 x2 0.397 x3 1.058 x4 0.636 x5 6.667 x6 6.667 x7 6.667 x8 6.667 x9 1.667 x10 7.575 x11 4.762 x12 4.762 x13 4.762 x14 4.762 x15 4.762 x16 2.632 x17 2.632 x18 1.150 x19 1.150 x20 1.429 x 21 1.429 x 22 25 x 23 25 x 24 25 x 25. 162335044 18
- 20. AKINOLA D. T. 145365 4.4. THE APPROACH OF NON-PREEMPTIVE GOAL PROGRAMMING This is a follow from the discussions in chapter 3, methodology of study. In the non-preemptive approach to goal programming, relative weights are assigned to the detrimental deviations. These act as a per unit penalty for failure to meet a stated goal. Using these weights one can convert the goal programming model into a linear programming model having the objective of minimizing the total weighted deviations from the goals. The resulting linear programming model then has the following form: MINIMIZE Subject To (the total weighted deviations from the goals) (1) (Expressions for the goal equations) (2) [Functional constraints, if any] (3) (Non-negativity constraints of all decision and deviation variables) It should be noted that It is not possible to have both p and n together for any response i. The weights, u and v take the value zero if the minimization of the corresponding deviational variable is not important to the weighted function at hand. 4.4.1. FORMULATING THE LINEAR MODEL USING NON-PREEMPTIVE GOAL PROGRAMMING 1. Establish the desired target levels ( T ,L &U ) for each of the responses/quality characteristics These are Z1 <= 182117.7 which is a lower limit U and Z2 >= 1726224.0 which is an upper limit L 2. Assign weights to each response and their respective negative ( n ) and positive ( p ) deviations The weights of the deviational variables or the per unit penalty for failure to meet a stated goal. There are 3 cases required to be solved for. The first is the scenario where a. w1 = 0.25 and w2 = 0.75, b. w1 = 0.5 and w2 = 0.5, and c. w1 = 0.75 and w2 = 0.25, Where secondly. w1 is the weight for p1 .w2 is the weight for n2 3. Construct the goal constraints of the problem. The goal constraint is usually given by; f (x) + n − p = T ,L ,or U 19
- 21. AKINOLA D. T. 145365 for each objective i This is given as Z1 + n1 - p1 = 182117.7 Z2 + n2 - p2= 1726224.0 4. Construct the achievement function of each response NOTE: It was observed that the values for the optimal objectives given in the primary material by Pakorn Adulbhan & Mario T. Tabucanon were incorrect and thus didn’t produce objective values as expected. By solving the objectives individually as linear programs subject to all the constraints, the following new values were obtained for z1 and z2. These are the values used in this computations to effect the possibility of obtaining a global optimum. Z1 = 182117.7 Z2 = 1726224.0 From the first objective function; Minimization of manufacturing cost (Z1) Minimize Z1 <= 182117.7 The objective is to minimize the value of Z1 such that it is lesser than or at most equal to 182117.7. This means an increase of the value over 182117.7 is unwanted. 182117.7 is in fact the tolerable maximum value. Therefore, the GOAL is to minimize the positive deviation of Z1. i.e Min p1 (where p1 is the positive deviation of the first objective) From the second objective function; Maximization of capacity utilization (Z2) Maximize Z2 >= 1726224.0 The objective is to maximize the value of Z1 such that it is greater than or at least equal to 1726224.0. This means a decrease of the value below 1726224.0 is unwanted. 1726224.0 is in fact the tolerable minimum value. Therefore, the GOAL is to minimize the negative deviation of Z2. i.e Min n2 (where n2 is the positive deviation of the second objective) The objective of a non-preemptive solution approach is to minimize the sum of the total weighted detrimental deviations from the goals. This approach assumes that no advantage is gained by overachieving the goals. 20
- 22. AKINOLA D. T. 145365 Thus the non-preemptive goal programming objective function for this problem: MINIMIZE z = w1p1 + w2n1 5. Construct the overall achievement function and add the goal constraints to the structural constraints of the problem. Hence, combining the new objective and the constraints complete non-preemptive goal programming goal programming model of the problem in this case is: MINIMIZE Subject To w1p1 + w2n1 Z1 + n1 - p1 = 182117.7 Z2 + n2 - p2= 1726224.0 Xj = b X1 , X2 , X3 , X10 , X11 , ...................... X25, p1, p2, n1, n2 >= 0 (n1 * p1 = 0) (n2 * p2 = 0) 6. Solve the model This is done using LINGO 13 program for solving optimization models 4.5. THE COMPLETE MODEL WRITTEN IN LINGO 13 CODE: By carefully inputting the program into the Lingo 13 program following the code ethics of the program, the resulting model is FOR CASE A, B and C MODEL: !Group 2, TIE 513 !AKINOLA DAMILOLA T. !145365; !Non-premeptive goal programming approach; DATA: !Declare the value for the weights; !for case A: w1 = 0.25, case B: w1= 0.5, case C: w1 = 0.75; w1 = ?; ENDDATA w2 = 1 – w1; 21
- 23. AKINOLA D. T. 145365 !the new objective function (deviational objectives); MINIMIZE w1*p1 + w2*n1; !subject to; 0.424*x1 + 0.22*x2 + 0.22*x3 + 0.1*x4 +0.1*x5 + x6 + 0.9*x7 + 1.2*x8 + 1.1*x9 + x10 + 0.179*x11 + 0.137*x12 + 0.2*x13 + 0.168*x14 + 0.137*x15 + 0.126*x16 + 0.121*x17 + 0.121*x18 + 0.123*x19 +0.122*x20 + 0.122*x21 + 0.120*x22 + 0.120*x23 + 0.120*x24 + 0.120*x25 + n1 - p1 = 182117.7; 0.965*x1 + 0.397*x2 + 0.397*x3 + 1.058*x4 + 0.636*x5 + 6.667*x6 + 6.667*x7 + 6.667*x8 + 6.6667*x9 + 1.667*x10 + 7.575*x11 + 4.762*x12 + 4.762*x13 + 4.762*x14 + 4.762*x15 + 4.762*x16 + 2.632*x17 + 2.632*x17 + 2.632*x18 + 1.150*x19 + 1.150*x20 + 1.429*x21 + 1.429*x22 + 25*x23 + 25*x24 +25*x25 + n2 - p2= 1726224.0; !Material balance constraints; !Maximum marl and slurry output; 0.71*x1 <= 160000; x4 + x5 <=200000; !Raw material proportions; 0.175*x1 + 0.25*x2 - 0.75*x3 = 0; !Material balance at node c; 0.693*x1 + 0.99*x2 + 0.99*x3 - x4 - x5 = 0; !Material balance at junction 1; x4 + x5 - x6 - x7 - x8 - x9 - x10 = 0; !Material balance at junction 2; 0.625*x6 + 0.625*x7 + 0.625*x8 + 0.625*x9 + 0.625*x10 - x11 - x12 - x13 - x14 - x15 - x16 = 0; !Material balance at junction 3; 1.05*x11 + 1.05*x12 + 1.05*x12 + 1.05*x13 + 1.05*x14 + 1.05*x15 + 1.05*x16 - x17 - x18 - x19 - x20 - x21 - x22 - x23 - x24 - x25 = 0; !The capacity constraints; x1 <= 315000; 0.7*x1 <= 189000; 0.7*x1 + x2 + x3 <= 252000; x4 <= 94000; x5 <= 157500; x6 <= 15000; x7 <= 15000; 22
- 24. AKINOLA D. T. 145365 x8 <= 15000; x9 <= 15000; x10 <= 60000; 1.05*x11 <= 13860; 1.05*x12 <= 22050; 1.05*x13 <= 22050; 1.05*x14 <= 22050; 1.05*x15 <= 22050; 1.05*x16 <= 22050; x17 <= 38000; x18 <= 38000; x19 <= 87000; x20 <= 87000; x21 <= 70000; x22 <= 70000; x23 <= 4000; x24 <= 4000; x25 <= 4000; !Existing managemeent decision on utilization of company's full capacity; x6 + x7 + x8 + x9 + x10 = 120000; !Non negativity constraints; x1 >= 0; x2 >= 0; x3 >= 0; x4 >= 0; x5 >= 0; x6 >= 0; x7 >= 0; x8 >= 0; x9 >= 0; x10 >= 0; x11 >= 0; x12 >= 0; x13 >= 0; x14 >= 0; x15 >= 0; x16 >= 0; x17 >= 0; x18 >= 0; x19 >= 0; x20 >= 0; x21 >= 0; x22 >= 0; x23 >= 0; 23
- 25. AKINOLA D. T. 145365 x24 >= 0; x25 >= 0; !for each objective's deviation; n1 >= 0; p1 >= 0; n2 >= 0; p2 >= 0; !n1 * p1 = 0; !n2 * p2 = 0; END 24
- 26. AKINOLA D. T. 145365 5. DISCUSSION OF RESULTS AND CONCLUSION The results of the three cases of the optimization models are presented below in the table below. It is the result from the solved Lingo 13 model. Objective Value CASE B W1 = 0.5, W2= 0.5 CASE C W1 = 0.75, W2=0.25 YES YES 49.49167 Was a Global Optimum Found? CASE A W1 = 0.25, W2=0.75 YES 98.98333 0.000000 148.4750 Infeasibilities Total solver iterations Model class COMMENT The Lingo 13 program found a global optimum for the three cases Significant differences 8 LP 29 0 Total variables Nonlinear variables: Integer variables: Total constraints: Nonlinear constraints: Total nonzeros: Nonlinear nonzeros: 0 Same for case A, case B and case C 65 0 161 0 Table 4. Obective value Results from Lingo 13 for case A, B, C VARIABLE W1 W2 P1 N1 X1 X2 X3 X4 X5 X6 X7 CASE A VALUE CASE B CASE C 0.2500000 0.7500000 197.9667 0.000000 0.000000 90909.09 30303.03 0.000000 120000.0 15000.00 15000.00 0.5000000 0.5000000 197.9667 0.000000 0.000000 90909.09 30303.03 0.000000 120000.0 15000.00 15000.00 0.7500000 0.2500000 197.9667 0.000000 0.000000 90909.09 30303.03 0.000000 120000.0 15000.00 15000.00 25
- 27. AKINOLA D. T. 145365 X8 X9 X10 X11 X12 X13 X14 X15 X16 X17 X18 X19 X20 X21 X22 X23 X24 X25 N2 P2 15000.00 15000.00 60000.00 12000.00 0.000000 0.000000 21000.00 21000.00 21000.00 0.000000 0.000000 0.000000 0.000000 0.000000 70000.00 4000.000 4000.000 750.0000 392061.3 0.000000 15000.00 15000.00 60000.00 12000.00 0.000000 0.000000 21000.00 21000.00 21000.00 0.000000 0.000000 0.000000 0.000000 0.000000 70000.00 4000.000 4000.000 750.0000 392061.3 0.000000 15000.00 15000.00 60000.00 12000.00 0.000000 0.000000 21000.00 21000.00 21000.00 0.000000 0.000000 0.000000 0.000000 0.000000 70000.00 4000.000 4000.000 750.0000 392061.3 0.000000 Table 5. Values of variables Results from Lingo 13 for case A, B, C The approach of non-preemptive goal programming can be said to be effective in dealing with the problem at hand. The obtained values for x1 to x25 are the optimal values. It is seen from these values that there are quite similar values compared with the results produced using the compromise constraint by Pakorn Adulbhan & Mario T. Tabucanon. Also, it is observed that the values for the variables generated were the same for the three cases. The difference in the objective values produced were thus only as a result of the varying weights applied for each case. The method of non-preemptive goal programming is therefore efficient in dealing with this case of the cement factory. It can also be applied to any other system with multiobjectives by following the procedures outlined in this study. 26
- 28. AKINOLA D. T. 145365 LIST OF FIGURES Figure 1: Contributions per unit rate of production Figure. 2. Process flow diagram of cement manufacturing LIST OF TABLES Table 1: Time in minutes required by each part Table 2: Construction of achievement function Table 3: Capacity of major capacity facilities Table 4: Objective value Results from Lingo 13 for case A, B, C Table 5: Values of variables Results from Lingo 13 for case A, B, C 6. REFERENCES Ademola David Adeyeye & Festus Adekunle Oyawale. (2010) Multi-objective methods for welding flux performance optimization. RMZ – Materials and Geoenvironment, 57 (2), 251-270. Jayant Rajgopal, (2004) Linear Programming and its solution procedures (Supplement to chapter 7: Non Linear Programming) [Online] McGraw-Hill. http://highered.mcgrawhill.com/sites/dl/free/0073017795/1161272/hil61217_ch07_supplement.pdf [Accessed 25th May 2013]. Lingo: The Modeling Language and Optimizer. (2012) Lingo 13 Users Manual. Lindo Systems Inc. Nonlinear Models: Dynamic, Goal, and Nonlinear Programming, Chapter 13: Goal Programming [Online] UNESP: FEG Campus de Guaratingueta- Faculdade de Engenharia de Guaratingueta. www.feg.unesp.br/~fmarins/OL/livro-Lawrence/pdf/Ch13.pdf [Accessed 24th May 2013]. Pakorn Adulbhan & Mario T. Tabucanon (1978) A biobjective model for production planning in a cement factory. Computer & Industrial Engineering, 3, 41-51. 27
- 29. AKINOLA D. T. 145365 FEG libraries (2004) Goal programming – FEG [Online] li/slides/Goal%20Programming1.ppt [Accessed 2nd June 2013]. www.feg.unesp.br/~fmarins/po- 28