TIME RESPONSE OF SECOND ORDER SYSTEM USING MATLAB
•Als DOCX, PDF herunterladen•
1 gefällt mir•734 views

THIS DOCUMENT IS MAINLY PREPARED ON THE TIME RESPONSE OF A SECOND ORDER SYSTEM AND IN THIS DOCUMENT WE ALSO DONE THE SIMULATION BY USING MATLAB AND HERE WE ALSO DONE THE THEORETICAL MATHEMATICAL CALCULATIONS TO SHOW HOW THE SYSTEM IS BEHAVING IN DIFFERENT CONDITIONS AND HERE WE ALSO DONE THE MATLAB CODING AND THE RESULTS ARE ALSO PLOTTED IN THE DOCUMENT

Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (20)
Ähnlich wie TIME RESPONSE OF SECOND ORDER SYSTEM USING MATLAB
Ähnlich wie TIME RESPONSE OF SECOND ORDER SYSTEM USING MATLAB (20)
Mehr von sanjay kumar pediredla
Mehr von sanjay kumar pediredla (20)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
TIME RESPONSE OF SECOND ORDER SYSTEM USING MATLAB
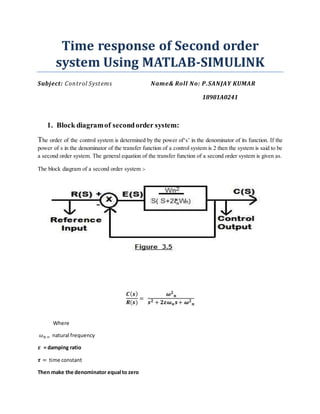
- 1. Time response of Second order system Using MATLAB-SIMULINK Subject: Control Systems Name& Roll No: P.SANJAY KUMAR 18981A0241 1. Block diagramof secondorder system: The order of the control system is determined by the power of‘s’ in the denominator of its function. If the power of s in the denominator of the transfer function of a control system is 2 then the system is said to be a second order system. The general equation of the transfer function of a second order system is given as. The block diagram of a second order system :- 𝑪( 𝒔) 𝑹(𝒔) = 𝝎 𝟐 𝒏 𝒔 𝟐 + 𝟐𝜺𝝎 𝒏 𝒔+ 𝝎 𝟐 𝒏 Where 𝜔 𝑛 = natural frequency 𝜺 = damping ratio 𝝉 = time constant Then make the denominator equal to zero
- 2. 𝒔 𝟐 + 𝟐𝜺𝝎 𝒏 𝒔 + 𝝎 𝟐 𝒏 = 𝟎 𝒔 𝟐 + 𝟐𝜺𝝎 𝒏 𝒔 + 𝝎 𝟐 𝒏 + 𝜺 𝟐 𝝎 𝟐 𝒏 − 𝜺 𝟐 𝝎 𝟐 𝒏 = 𝟎 (𝑠 + 𝜀𝜔 𝑛)2 − 𝜺 𝟐 𝝎 𝟐 𝒏 + 𝝎 𝟐 𝒏 (𝑠 + 𝜀𝜔 𝑛)2 + (𝝎 𝒏√ 𝟏− 𝜺 𝟐) 𝟐 = 𝟎 Where s1 and s2 are the solutions of the equsations S1 = −𝜺𝝎 𝒏 + 𝒋𝝎 𝒏√𝟏− 𝜺 𝟐 S2 = −𝜺𝝎 𝒏 − 𝒋𝝎 𝒏√𝟏− 𝜺 𝟐 These two roots of the equation of s represents the poles of the transfer function of that system.the real parts of the systemrepresentsthe damping and imaginary partb representsdampedfrequency of the system. 2. Time response for unit step input : The transfer function can be written as a C(s) = R(s) * 𝝎 𝟐 𝒏 𝒔 𝟐+𝟐𝜺𝝎 𝒏 𝒔+𝝎 𝟐 𝒏 Here R(s) = 1 𝑠 𝑪( 𝒔) 𝑹(𝒔) = 𝝎 𝟐 𝒏 𝒔(𝒔 𝟐 + 𝟐𝜺𝝎 𝒏 𝒔+ 𝝎 𝟐 𝒏) By using the partial fractions 𝝎 𝟐 𝒏 𝒔( 𝒔 𝟐 + 𝟐𝜺𝝎 𝒏 𝒔+ 𝝎 𝟐 𝒏) = 𝑨 𝑺 + 𝑩𝒔 + 𝑪 ( 𝒔 𝟐 + 𝟐𝜺𝝎 𝒏 𝒔 + 𝝎 𝟐 𝒏) 𝝎 𝟐 𝒏 = 𝑨( 𝒔 𝟐 + 𝟐𝜺𝝎 𝒏 𝒔 + 𝝎 𝟐 𝒏) + (𝑩𝑺 + 𝑪)( 𝑺) 𝝎 𝟐 𝒏 = 𝑨 𝒔 𝟐 + 𝑩𝑺 𝟐 + 𝑨𝟐𝜺𝝎 𝒏 𝒔 + 𝑪𝑺 + 𝑨𝝎 𝟐 𝒏 𝑩𝒚 𝒄𝒐𝒎𝒑𝒂𝒓𝒊𝒏𝒈 𝒕𝒉𝒆 𝒄𝒐𝒆𝒇𝒇𝒊𝒄𝒊𝒆𝒏𝒕𝒔 𝝎 𝟐 𝒏 = 𝑨𝝎 𝟐 𝒏 𝑨 = 𝟏 𝑨 𝒔 𝟐 + 𝑩𝑺 𝟐 = 𝟎 A + B = 0 B = -1 𝑨𝟐𝜺𝝎 𝒏 𝒔 + 𝑪𝑺 = 𝟎 𝑪 = −𝟐𝜺𝝎 𝒏
- 3. 𝑪( 𝒔) = 𝟏 𝑺 − 𝒔 + 𝟐𝜺𝝎 𝒏 ( 𝒔 𝟐+𝟐𝜺𝝎 𝒏 𝒔+𝝎 𝟐 𝒏) 𝑪( 𝒔) = 𝟏 𝑺 − 𝒔 + 𝜺𝝎 𝒏+𝜺𝝎 𝒏 ( 𝒔 𝟐+𝟐𝜺𝝎 𝒏 𝒔+𝝎 𝟐 𝒏+𝜺 𝟐 𝝎 𝟐 𝒏−𝜺 𝟐 𝝎 𝟐 𝒏) 𝑪( 𝒔) = 𝟏 𝑺 − 𝒔 + 𝜺𝝎 𝒏 ( 𝒔 +𝜺𝝎 𝒏) 𝟐−𝝎 𝟐 𝒏(𝟏−𝜺 𝟐) − 𝜺𝝎 𝒏 ( 𝒔 +𝜺𝝎 𝒏) 𝟐−𝝎 𝟐 𝒏(𝟏−𝜺 𝟐) By taking the cases Case 1:- 𝜺 = 𝟏 ( 𝒄𝒓𝒊𝒕𝒊𝒄𝒂𝒍 𝒅𝒂𝒎𝒑𝒊𝒏𝒈 ) 𝑪( 𝒔) = 𝟏 𝒔 − 𝟏 𝒔 + 𝝎 𝒏 + 𝝎 𝒏 (𝒔 + 𝝎 𝒏) 𝟐 By taking the inverse Laplace transformations 𝐶( 𝑡) = 1 − 𝑒 𝜔 𝑛 𝑡 − 𝝎 𝒏 𝑒 𝜔 𝑛 𝑡 ∗ 𝑡 𝐶( 𝑡) = 1 − 𝑒 𝜔 𝑛 𝑡 (1 + 𝑡𝝎 𝒏) At t = 0 >> c (t) = 1 – 𝑒0(1 + 0) = 1 − 1 = 0 At t = ∞ ≫ 𝑐( 𝑡) = 1 − 𝑒−∞(1 + ∞) = 1 − 0 = 1 Case 2 :- 𝜀 < 1 ( 𝑢𝑛𝑑𝑒𝑟 𝑑𝑎𝑚𝑝𝑖𝑛𝑔) 𝑐( 𝑡) = 1 − 𝑒−𝜔 𝑛 𝑡 cos( 𝝎 𝒏 (√ 𝟏 − 𝜺 𝟐) 𝒕)+ 𝜺 √𝟏 − 𝜺 𝟐) 𝐬𝐢𝐧( 𝝎 𝒏 (√ 𝟏 − 𝜺 𝟐) 𝒕) 𝑐( 𝑡) = 1 − 𝑒−𝜔 𝑛 𝑡 𝐜𝐨𝐬𝐡( 𝝎 𝒅 𝒕) + 𝜺 √𝟏 − 𝜺 𝟐) 𝐬𝐢𝐧( 𝝎 𝒅 𝒕) Case 3:- 𝜀 > 1 ( 𝑜𝑣𝑒𝑟 𝑑𝑎𝑚𝑝𝑖𝑛𝑔 ) 𝑐( 𝑡) = 1 − 𝑒−𝜔 𝑛 𝑡 cos( 𝝎 𝒏 (√ 𝟏 − 𝜺 𝟐) 𝒕)+ 𝜺 √𝟏 − 𝜺 𝟐) 𝐬𝐢𝐧( 𝝎 𝒏 (√ 𝟏 − 𝜺 𝟐) 𝒕) 𝑐( 𝑡) = 1 − 𝑒−𝜔 𝑛 𝑡 𝐜𝐨𝐬𝐡( 𝝎 𝒅 𝒕) + 𝜺 √𝟏 − 𝜺 𝟐) 𝐬𝐢𝐧( 𝝎 𝒅 𝒕)
- 4. 3. Time response plot: mat lab code 4. Response onmat lab :-