Servo Motor Control Using Arduino & PWM
•Als PPTX, PDF herunterladen•
8 gefällt mir•2,678 views

The document discusses how to configure timers on an Arduino to generate pulse-width modulated (PWM) signals for controlling servo motors. It explains that servo motors use PWM signals of varying pulse widths to control angular position precisely. It then provides code examples and explanations for setting up timer 1 on an Arduino in fast PWM mode at 50Hz to generate the necessary PWM signals, including setting the prescaler, waveform generation mode, and compare value. It also gives examples of PWM pulse widths needed to control a servo at different angles.

Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (20)
Andere mochten auch
Andere mochten auch (20)
Ähnlich wie Servo Motor Control Using Arduino & PWM
Ähnlich wie Servo Motor Control Using Arduino & PWM (20)
Mehr von Robo India
Mehr von Robo India (19)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
Servo Motor Control Using Arduino & PWM
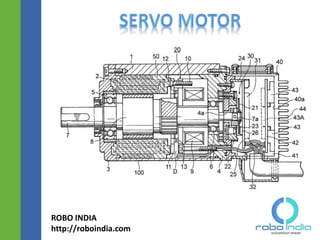
- 3. • Servo motor is nothing but a simple motor based on servo mechanism. • Servomechanism is a closed loop feedback systems uses +ve feedback to control its motion. • With the help of servomechanism, servo motor give precise control of angular position.
- 4. • Motor have a dedicated encoder • Simplest servomotors use position-only sensing via a potentiometer Click here to visit -ROBO INDIA
- 5. TCCR1A|=(1<<COM1A1)|(1<<COM1B1)|(1<<WGM11); //NON Inverted PWM TCCR1B|=(1<<WGM13)|(1<<WGM12)|(1<<CS11)|(1<<CS10); //PRESCALER=64 MODE 14(FAST PWM) ICR1=4999; //fPWM=50Hz (Period = 20ms Standard). DDRD|=(1<<PD4)|(1<<PD5); //PWM Pins as Out Click here to visit -ROBO INDIA
- 6. TCCR1A|=(1<<COM1A1)|(1<<COM1B1)|(1<<WGM11); • COM1A1 = 1 • COM1B1 = 1 • WGM11 = 1 1 0 1 0 0 0 1 0 Click here to visit -ROBO INDIA
- 7. TCCR1A|=(1<<COM1A1)|(1<<COM1B1)|(1<<WGM11); • WGM10 = 0 //Used in Waveform Generation • WGM11 = 1 //Used in Waveform Generation • COM1A1 = 1 • COM1B1 = 1 1 0 1 0 0 0 1 0 Click here to visit -ROBO INDIA
- 8. • The COM1A1,COM1A0,COM1B1 and COM1B0 control OC1A and OC1B 1 0 1 0 0 0 1 0 Click here to visit -ROBO INDIA
- 9. TCCR1B|=(1<<WGM13)|(1<<WGM12)|(1<<CS11)|(1<<CS10); • WGM12 = 1 • WGM13 = 1 • CS11 = 1 • CS10 = 1 0 0 0 1 1 0 1 1 Click here to visit -ROBO INDIA
- 10. TCCR1B|=(1<<WGM13)|(1<<WGM12)|(1<<CS11)|(1<<CS10); • WGM10 = 0 // TCCR1A • WGM11 = 1 // TCCR1A • WGM12 = 1 // TCCR1B • WGM13 = 1 // TCCR1B 0 0 0 1 1 0 1 1 Click here to visit -ROBO INDIA
- 11. • WGM10 = 0 // TCCR1A • WGM11 = 1 // TCCR1A • WGM12 = 1 // TCCR1B • WGM13 = 1 // TCCR1B Click here to visit -ROBO INDIA
- 12. • FAST PWM Mode • TOP Value = ICR1 //Timer count from 0 to ICR1 Click here to visit -ROBO INDIA
- 13. TCCR1B|=(1<<WGM13)|(1<<WGM12)|(1<<CS11)|(1<<CS10); CS12 = 1 : CS11 = 1 : CS10 = 0 0 0 0 1 1 0 1 1 Click here to visit -ROBO INDIA
- 14. TCCR1B|=(1<<WGM13)|(1<<WGM12)|(1<<CS11)|(1<<CS10); • Prescaler is 64. • Means16MHz/64 = 250khz (4 uS period) 0 0 0 1 1 0 1 1 Click here to visit -ROBO INDIA
- 15. 𝑓 𝑝𝑤𝑚 = 𝑓 𝑐𝑝𝑢 𝑛(1 + 𝑇𝑂𝑃) Click here to visit -ROBO INDIA
- 16. 𝑓 𝑝𝑤𝑚 = 𝑓 𝑐𝑝𝑢 𝑛(1 + 𝑇𝑂𝑃) fpwm = 20ms (50 Hz) fcpu = 16000000Hz n = 64 TOP = 4999 // RESULT Click here to visit -ROBO INDIA
- 17. 𝑓 𝑝𝑤𝑚 = 𝑓 𝑐𝑝𝑢 𝑛(1 + 𝑇𝑂𝑃) fpwm = 20ms (50 Hz) fcpu = 16000000Hz n = 64 TOP = 4999 // RESULT Click here to visit -ROBO INDIA
- 18. 𝑓 𝑝𝑤𝑚 = 𝑓 𝑐𝑝𝑢 𝑛(1 + 𝑇𝑂𝑃) fpwm = 20ms (50 Hz) fcpu = 16000000Hz n = 64 TOP = 4999 // RESULT Click here to visit -ROBO INDIA
- 19. 𝑓 𝑝𝑤𝑚 = 𝑓 𝑐𝑝𝑢 𝑛(1 + 𝑇𝑂𝑃) fpwm = 20ms (50 Hz) fcpu = 16000000Hz n = 64 TOP = 4999 // RESULT Click here to visit -ROBO INDIA
- 20. TCCR1A|=(1<<COM1A1)|(1<<COM1B1)|(1<<WGM11); //NON Inverted PWM TCCR1B|=(1<<WGM13)|(1<<WGM12)|(1<<CS11)|(1<<CS10); //PRESCALER=64 MODE 14(FAST PWM) ICR1=4999; //fPWM=50Hz (Period = 20ms Standard). DDRD|=(1<<PD4)|(1<<PD5); //PWM Pins as Out Click here to visit -ROBO INDIA
- 21. • Servo Angle 0 need 0.388ms(388uS) pulse Value of OCR1A = 388us/4us = 97 • Servo Angle 90 need 1.264ms(1264uS) pulse Value of OCR1A = 1264us/4us = 316 • Servo Angle 180 need 2.140ms(2140uS) pulse Value of OCR1A = 2140us/4us = 535 Click here to visit -ROBO INDIA
- 22. To share your views and queries please write us- Website: http://roboindia.com Email- info@roboindia.com Click here to visit -ROBO INDIA