35. ヒューマンモデリング技術を用いた動作解析
•Als PPTX, PDF herunterladen•
0 gefällt mir•478 views

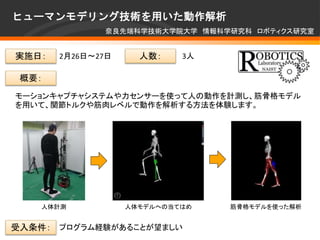
モーションキャプチャシステムや力センサーを使って人の動作を計測し、筋骨格モデルを用いて、関節トルクや筋肉レベルで動作を解析する方法を体験します。

Empfohlen
Weitere ähnliche Inhalte
Mehr von 奈良先端大 情報科学研究科
Mehr von 奈良先端大 情報科学研究科 (20)
Kürzlich hochgeladen
Kürzlich hochgeladen (6)
35. ヒューマンモデリング技術を用いた動作解析
- 1. ヒューマンモデリング技術を用いた動作解析 奈良先端科学技術大学院大学 情報科学研究科 ロボティクス研究室 モーションキャプチャシステムや力センサーを使って人の動作を計測し、筋骨格モデル を用いて、関節トルクや筋肉レベルで動作を解析する方法を体験します。 概要: 実施日: 2月26日〜27日 人数: 3人 受入条件: プログラム経験があることが望ましい 人体計測 人体モデルへの当てはめ 筋骨格モデルを使った解析