Robotics: 2-Link Planar Manipulator
•Als PPT, PDF herunterladen•
8 gefällt mir•18,849 views

![Forward Kinematics ,[object Object],[object Object]](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (20)
Andere mochten auch
Ähnlich wie Robotics: 2-Link Planar Manipulator
Ähnlich wie Robotics: 2-Link Planar Manipulator (20)
Mehr von Damian T. Gordon
Mehr von Damian T. Gordon (20)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
Robotics: 2-Link Planar Manipulator
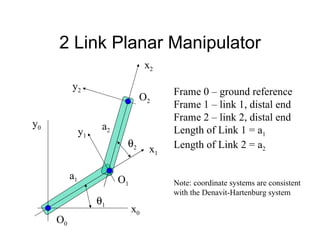
- 1. 2 Link Planar Manipulator 2 1 a 1 a 2 O 2 O 1 O 0 x 1 x 0 x 2 y 1 y 2 y 0 Frame 0 – ground reference Frame 1 – link 1, distal end Frame 2 – link 2, distal end Length of Link 1 = a 1 Length of Link 2 = a 2 Note: coordinate systems are consistent with the Denavit-Hartenburg system
- 3. Homogeneous Transformations in a plane O 1 O 0 p 0 p 1 0 d 01 y 0 x 0 x 1 y 1 P
- 5. Frame 1 is displaced from Frame 0 by rotation of 30 degrees and a translation of (1,1). Frame 2 is displaced from Frame 1 by a rotation of 60 degrees and translation of (1/2, 3/2) O 1 O 0 p 2 30 d 01 y 0 x 0 x 1 y 1 1 1 d 12 p 1 p 0 y 2 x 2 60 1/2 Sqrt(3)/2 1 1
- 6. O 1 O 0 p 2 30 d 01 y 0 x 0 x 1 y 1 1 1 d 12 p 1 p 0 y 2 x 2 60 1/2 Sqrt(3)/2 1 1
- 8. P1 P2
- 9. Operators Note: in composing homogeneous transformations Translation matrix, then Rotation Matrix