1) O documento discute a neurofisiologia dos sentidos somáticos, classificando-os em mecanorreceptivos, termorreceptivos e de dor. 2) Detalha os diferentes receptores envolvidos na detecção do toque, pressão, vibração e cócegas, incluindo os corpúsculos de Meissner, discos de Merkel e corpúsculos de Pacini. 3) Explica como esses receptores transmitem sinais táteis e como se adaptam a diferentes estímulos.
2. Neurofisiologia
• Classificação dos sentidos somáticos:
• Podem ser classificados em três tipos
fisiológicos.
• 1 – Sentidos somáticos
mecanorreceptivos (incluem sensação
de tato e posição, que são estimulados
por deslocamento mecânico de alguns
tecidos corporais);
• 2 – Sentidos termoreceptivos (detectam
calor e frio);
• 3 – Sentido da dor (ativado por qualquer
fator que leve a uma lesão tecidual).
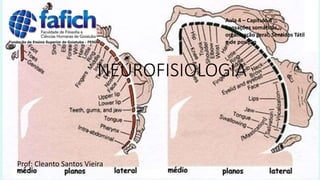
Aula 4 – Capítulo 4
Sensações somáticas, organização geral;
Sentidos Tátil e de posição
3. Neurofisiologia
• Detecção e transmissão das sensações táteis:
• Inter-relação entre sensações táteis de toque, pressão
e vibração.
• Apesar de classificadas como distintas, tanto o toque
como, pressão e a vibração são detectados pelos
mesmos tipos de receptores.
• Entre essas sensações só existem três diferenças:
• 1 – A sensação de toque resulta da estimulação de
receptores táteis localizados na pele ou em tecidos
imediatamente abaixo dela;
• 2 – A sensação de pressão resulta geralmente de
tecidos mais profundos;
• 3 – A sensação de vibração resulta de sinais sensoriais
rapidamente repetitivos, mas são utilizados alguns dos
mesmos tipos de receptors usados na detecção de
toque e pressão – especificamente os receptors se
adaptam muito rapidamente.
Aula 4 – Capítulo 4
Sensações somáticas, organização geral;
Sentidos Tátil e de posição
4. Neurofisiologia
• Os sentidos táteis envolvem os de toque,
pressão, vibração e cócegas, os sentidos
de posição envolvem os de postura
estática e de velocidade de movimento.
• Outras classificações de sensações
somáticas incluem ainda outras classes
não necessariamente mutuamente
exclusivas como por exemplo:
• Sensações exterorreceptivas:
provenientes da superfície corporal.
• Sensações proprioceptivas: relacionadas
ao estado físico corporal, incluídas aí as
sensações de posição, as sensações
músculo-tendíneas, as sensações de
pressão vindas de áreas profundas dos
pés e espacialmente a sensação de
equílibrio, geralmente considerada uma
sensação especial.
Aula 4 – Capítulo 4
Sensações somáticas, organização
geral; Sentidos Tátil e de posição
5. Neurofisiologia
• Sensações viscerais:
provenientes das vísceras,
geralmente provenientes dos
órgãos internos (intestinos,
bexiga, rins, baço, etc…)
• Sensações profundas: oriundas
dos tecidos profundos, como as
fáscias, músculos, óssos e
outras, estando incluídas a
pressão profunda, a dor e a
vibração.
Aula 4 – Capítulo 4
Sensações somáticas, organização geral;
Sentidos Tátil e de posição
6. Neurofisiologia
• Detecção e transmissão das sensações táteis:
• Receptores táteis: são conhecidos pelo menos seis
diferentes, mas há muitos outros semelhantes a
eles.
• 1 – terminações nervosas livres -> encontradas
em toda a pele e em muitos outro tecidos, podem
detectar toque e pressão.
• 2 – Corpúsculo de Meissner -> é uma terminação
nervosa encapsulada e alongada que excita uma
fibra nervosa sensorial de grande diâmetro (tipo
Aβ). Estes receptores estão presentes na pele que
não possui pelos (chamada pele glabra), são
abundantes nas pontas dos dedos, lábios, etc...
• Se adaptam em fração de segundos após serem
estimulados (particularmente sensíveis ao
movimento de objetos leves sobre a superfície da
pele e vibrações de baixa frequência.
Aula 4 – Capítulo 4
Sensações somáticas, organização geral;
Sentidos Tátil e de posição
7. Neurofisiologia
• 3 – Discos de Merkel -> A parte pilosa da pele também
contém uma quantidade moderada de receptors de
ponta expandida, esses receptors se diferem dos
corpúsculos de Meissner pelo fato de transmitirem um
sinal inicialmente forte, mas que se adapta parcialmente,
seguindo-se um sinal contínuo mais fraco, de adaptação
muito lenta.
• São responsáveis pelo fornecimento de sinais
estacionários, que permitem a detecção de toque
continuado de objetos sobre a pele.
• Se grupam formando um só receptor, denominado
receptor de cúpula de iggo (projeta-se para cima contra a
face interna do tecido epithelial da pele.
• O grupo de discos de Merkel é inervado por só uma fibra
nervosa mielínica, de grande diâmetro (Aβ).
• Tem papel importante na localização das sensações de
toque em áreas superficiais específicas do corpo, e na
determinação da textura do que se está sentindo.
Aula 4 – Capítulo 4
Sensações somáticas, organização geral;
Sentidos Tátil e de posição
8. Neurofisiologia
• 4 – Órgão piloso terminal -> o
movimento suave de qualquer pêlo
do corpo estimula a fibra nervosa
basal, denominada órgão piloso
terminal, que é também um receptor
de toque.
• Esse receptor se adapta facilmente, e
da mesma maneira que os
corpúsculos de Meissner, detecta
principalmente os movimentos de
objetos sobre a superfície corporal,
ou o contato inicial com o corpo.
Aula 4 – Capítulo 4
Sensações somáticas, organização geral;
Sentidos Tátil e de posição
9. Neurofisiologia
• 5 – Órgãos terminais de Ruffini ->
terminações encapsuladas e com muitas
ramificações, essas terminações se adaptam
muito pouco, por isso, são importantes para a
detecção de estados de deformação
continuada da pele e dos tecidos mais
profundos, como por exemplo: sinais de toque
e pressão mais fortes e contínuos (ajudam a
sinalizar o grau de rotação das articulações).
Aula 4 – Capítulo 4
Sensações somáticas, organização geral;
Sentidos Tátil e de posição
10. Neurofisiologia
• 6 – Corpúculo de Vater Pacini -> situados
imediatamente abaixo da pele e também em
regiões mais profundas, nas fáscias teciduais
do corpo.
• Só são estimulados por movimentos muito
rápidos dos tecidos (adaptam-se em
centesimos de Segundo).
• Particularmente importantes para a detecção
de vibrações dos tecidos ou de outras
modificações rápidas do estado mecânico
tecidual.
Aula 4 – Capítulo 4
Sensações somáticas, organização geral;
Sentidos Tátil e de posição
11. Neurofisiologia
• Detecção da vibração: Todos os diferentes
receptors táteis estão envolvidos na detecção
da vibração, apesar de serem sensíveis a
diferentes frequências de vibração.
• Ex: corpúsculos de Pacini são capazes de
sinalizar vibrações na faixa entre 30 e 800
ciclos/s, respondendo de forma extremamente
rápida as deformações teciduais pequenas e
rápidas, além disso, transmitem seus sinais via
tipo Aβ, capazes de transmitir mais de 1.000
impulsos por Segundo.
• Vibrações de baixa frequência, até 80 ciclos/s
estimulam outros receptors táteis
(especialmente os corpúsculos de Meissner),
que se adaptam mais lentamente.
Aula 4 – Capítulo 4
Sensações somáticas, organização geral;
Sentidos Tátil e de posição
12. Neurofisiologia
• Prurido e cócega: Estudos recentes
demonstraram a exitência de terminações
nervosas livres mecanorreceptivas de alta
sensibilidade e adaptação muito rápida
(especializadas em prurido e cócega).
• São encontradas quase exclusivamente nas
camadas superficiais da pele (único tecido em
que as sensações de prurido e cócegas podem
ser detectadas).
• Essas sensações são transmitidas por fibras
amielínicas do tipo C (semelhantes às que
transmitem a dor epicrítica ou lenta).
• O objetivo da sensação de prurido é chamar a
atenção para estimulos superficiais médios (o
arrastar de uma pulga na pele ou picada de
mutuca).
• Os sinais gerados por esses estímulos excitam o
reflex de coçar ou outras manobras que afastem
o hospedeiro do fator irritante.
Aula 4 – Capítulo 4
Sensações somáticas, organização geral;
Sentidos Tátil e de posição