
Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (20)
Andere mochten auch
Andere mochten auch (16)
Ähnlich wie Program on Demand
Ähnlich wie Program on Demand (20)
Program on Demand
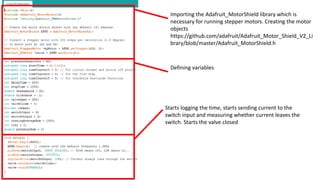
- 1. Importing the Adafruit_MotorShield library which is necessary for running stepper motors. Creating the motor objects https://github.com/adafruit/Adafruit_Motor_Shield_V2_Li brary/blob/master/Adafruit_MotorShield.h Defining variables Starts logging the time, starts sending current to the switch input and measuring whether current leaves the switch. Starts the valve closed
- 2. This is a loop, i.e. the Arduino does this continuously while the pump is running. It reads the pressure, reads the time, and checks if enough iterations (1000) have passed for it to take the running average of its last few pressure reads. If not it keeps iterating If enough iterations have passed it takes the running average, resets its iterator (iter and pressureSum) and starts deciding what to do. If the voltage is tiny or negative, the circuit is broken, it does nothing and notifies the user. If the sliding switch is closed it does nothing and reports the closure. Since the switch input is set to Input_Pullup, HIGH means its closed, and LOW means its open. This creates resistance to environmental perturbations. If pressure is far above threshold it opens the valve to release pressure If pressure is far below threshold it closes valve and takes a step
- 3. Mission accomplished! We’re within tolerance of the set point! First, close the valve Occasional steps to make sure flow is maintained. Otherwise no step Based on experimental data, maps sensor voltage outputs to actual pressures (data not reported here) Heaviside/Unit Step function. Part of timekeeping algorithm.