componente tangencial
•
0 gefällt mir•2,860 views

Componentes tangencial y normal de la aceleracion y velocidad, componentes polares de aceleracion y velocidad.

Empfohlen
Weitere ähnliche Inhalte
Was ist angesagt?
Was ist angesagt? (20)
Ähnlich wie componente tangencial
Ähnlich wie componente tangencial (20)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
componente tangencial
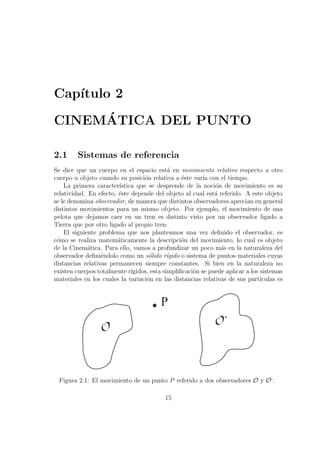
- 1. Cap´ıtulo 2 CINEM´ATICA DEL PUNTO 2.1 Sistemas de referencia Se dice que un cuerpo en el espacio est´a en movimiento relativo respecto a otro cuerpo u objeto cuando su posici´on relativa a ´este var´ıa con el tiempo. La primera caracter´ıstica que se desprende de la noci´on de movimiento es su relatividad. En efecto, ´este depende del objeto al cual est´a referido. A este objeto se le denomina observador, de manera que distintos observadores aprecian en general distintos movimientos para un mismo objeto. Por ejemplo, el movimiento de una pelota que dejamos caer en un tren es distinto visto por un observador ligado a Tierra que por otro ligado al propio tren. El siguiente problema que nos planteamos una vez definido el observador, es c´omo se realiza matem´aticamente la descripci´on del movimiento, lo cual es objeto de la Cinem´atica. Para ello, vamos a profundizar un poco m´as en la naturaleza del observador defini´endolo como un s´olido r´ıgido o sistema de puntos materiales cuyas distancias relativas permanecen siempre constantes. Si bien en la naturaleza no existen cuerpos totalmente r´ıgidos, esta simplificaci´on se puede aplicar a los sistemas materiales en los cuales la variaci´on en las distancias relativas de sus part´ıculas es O P O' Figura 2.1: El movimiento de un punto P referido a dos observadores O y O‘. 15
- 2. 16 CAP´ITULO 2. CINEM´ATICA DEL PUNTO O O Figura 2.2: Los sistemas de referencia caracterizan al observador. despreciable desde un punto de vista macrosc´opico. En todo caso, para el desarrollo de la teor´ıa podemos considerar siempre la existencia de s´olidos ideales para la descripci´on del movimiento. El ejemplo de observador con el que m´as nos sentimos identificados es el de la propia Tierra. Nuestra concepci´on del movimiento est´a ligada a nuestras observa-ciones realizadas desde la superficie terrestre. Dado un s´olido r´ıgido, se denomina sistema de referencia al conjunto formado un punto O del s´olido y tres rectas no coplanarias del mismo que pasan por O. A este punto se le denomina origen del sistema de referencia (figura 2.2). Cuando las tres rectas son ortogonales, el sistema de referencia se denomina rectangular. Como la elecci´on del origen es arbitraria, un observador puede definir infinitos sistemas de referencia. Por otro lado, cada sistema de referencia est´a ligado a un ´unico observador. En adelante, utilizaremos indistintamente ambos t´erminos para referirnos al mismo s´olido. Por otro lado, si bien el s´olido real tiene una extensi´on finita, cualquier sistema de referencia asociado a un cuerpo r´ıgido define un s´olido que tiene infinitos puntos, cada uno de ellos ocupando una posici´on fija respecto al mismo. Un sistema de coordenadas es una regla concreta que permite asignar a cada punto P del espacio un conjunto de tres n´umeros que define biun´ıvocamente su posici´on respecto a un sistema de referencia. El sistema de coordenadas m´as utilizado es el cartesiano rectangular, el cual est´a definido a partir de las distancias x1, x2 y x3 entre el punto y tres planos ortogonales que se cortan en el punto O, origen del sistema de referencia. Estos n´umeros tienen signo positivo o negativo seg´un el semiespacio en que se encuentre el punto respecto a cada plano. Los tres planos se cortan dos a dos en rectas que constituyen los denominados ejes coordenados 1 OX1, OX2 y OX3, y que constituyen un sistema de referencia 1Otra notaci´on bastante utilizada es llamar x, y y z a las tres coordenadas cartesianas y OX,
- 3. 2.1. SISTEMAS DE REFERENCIA 17 X1 X2 X3 O X1 X2 P X3 O Figura 2.3: Sistema de coordenadas cartesiano rectangular. rectangular (figura 2.3). Dado un punto P en movimiento relativo respecto a un sistema de referencia O, se define el vector de posici´on de P respecto a O, al vector que tiene su punto de aplicaci´on en el origen O del sistema de referencia y cuyo extremo es P. Design´andolo por r, tenemos r = → OP . (2.1) Si elegimos para dar la posici´on de P en el espacio un sistema de coordenadas rectangulares (x, y, z), el vector de posici´on se puede expresar en la base {ı,,} for-mada por los tres vectores unitarios cuyas direcciones son las de los ejes coordenados, como (figura 2.4): r = xı + y + zk. (2.2) Por tanto, las coordenadas cartesianas coinciden con las componentes del vector de posici´on en la base {ı,,k}. Si la posici´on de P es la misma para todo instante de tiempo se dice que est´a en reposo relativo respecto a O. Por otro lado, cuando el vector de posici´on var´ıa con el tiempo el punto describe un lugar geom´etrico denominado trayectoria. Dado que el movimiento es relativo, la trayectoria depende del observador. Por ejemplo, si consideramos tan s´olo la acci´on del campo gravitatorio terrestre, un objeto que se deja caer al mar desde un barco que se mueve a velocidad constante respecto a Tierra, tiene un movimiento rectil´ıneo para un observador ligado al barco. Para un observador ligado a Tierra, el cual ve al barco en movimiento, la trayectoria del objeto es una par´abola. OY , OZ a los ejes coordenados. En lo sucesivo, utilizaremos ambas indistintamente.
- 4. 18 CAP´ITULO 2. CINEM´ATICA DEL PUNTO X Y Z P r = OP k o O i j Figura 2.4: Vector de posici´on. X Y Z O P O Figura 2.5: La trayectoria es el lugar geom´etrico de los extremos del vector de posici´on.
- 5. 2.2. VELOCIDAD 19 Z r(t+ t) o r X Y Vm r(t) Figura 2.6: Velocidad media. 2.2 Velocidad Sean r(t) y r(t + Δt) los vectores de posici´on de un punto m´ovil respecto a un observador O en los instantes de tiempo t y t+Δt. Se define el vector desplazamiento en dicho intervalo a la diferencia Δr = r(t+Δt) −r(t). (2.3) A partir de Δr, definimos la velocidad media del punto entre los instantes t y t+Δt, como: V m = Δr Δt . (2.4) Como V m es paralelo a Δr, este vector lleva la direcci´on de la secante a la trayectoria descrita por el punto entre los puntos r(t) y r(t+Δt) (figura 2.6). La velocidad media permite conocer la variaci´on del vector de posici´on por unidad de tiempo entre dos puntos dados de la trayectoria. Si queremos calcular esta variaci´on considerando dos puntos infinitamente pr´oximos, debemos tomar en (2.4) el l´ımite cuando Δt tiende a cero, obteniendo lo que se conoce como velocidad instant´anea o simplemente, velocidad del punto en el instante t. Como la operaci´on de tomar l´ımite cuando Δt → 0 coincide con la definici´on de derivada, tenemos 2: V = lim Δt→0 Δr Δt = dr dt . (2.5) Si r est´a expresado a partir de (2.2), la velocidad se expresa como 2Otra forma de denotar la derivada temporal es colocando un punto encima del vector, es decir dr dt ≡ ˙ r. En caso de que sea una derivada segunda, se colocar´an dos puntos. En adelante, ambas notaciones ser´an utilizadas indistintamente.
- 6. 20 CAP´ITULO 2. CINEM´ATICA DEL PUNTO X Y r(t+ t) Z o r(t) V(t) S0 S0 Po P Figura 2.7: La velocidad es un vector tangente a la trayectoria en cada punto. V = dx dt ı + dy dt + dz dt k, (2.6) de manera que las componentes de V seg´un los ejes OX, OY y OZ son vx = dx dt ; vy = dy dt ; vz = dz dt . (2.7) Al obtener (2.6) a partir de (2.2) hemos tenido en cuenta que los vectores de la base son fijos respecto al observador, siendo por tanto nula su derivada temporal. En el Sistema Internacional la unidad de velocidad es el m/s. N´otese que cuando Δt se aproxima a cero, el vector desplazamiento va cam-biando continuamente de m´odulo y direcci´on de manera que en el l´ımite Δt → 0 el desplazamiento infinitesimal dr lleva la direcci´on de la tangente a la curva en el punto M. Por tanto, la velocidad es un vector tangente a la trayectoria. Su m´odulo se denomina celeridad, y viene dado por: v = |V| = v2x + v2 y + v2 z = dS dt , (2.8) siendo dS = √ dx2 + dy2 + dz2 la distancia entre dos puntos infinitamente pr´oximos sobre la trayectoria. A continuaci´on, vamos a expresar la velocidad a partir de un vector unitario tangente definido en cada punto de la curva. Para ello, consideremos un punto arbitrario de la trayectoria Po. Se define la coordenada de arco s de un punto P, al
- 7. 2.3. ACELERACI ´ ON 21 desplazamiento PoP medido a lo largo de la curva y con un signo positivo o negativo seg´un que P se encuentre a un lado u otro de Po. Sea Δs el incremento del arco entre los puntos r(t) y r(t+Δt). Multiplicando y dividiendo en (2.4) por Δs, tenemos: V m = Δr Δs Δs Δt → V = lim Δt→0 V m = ( lim Δs→0 Δr Δs )( lim Δt→0 Δs Δt ) = dr ds ds dt . (2.9) Cuando Δs tiende a 0, ya hemos visto que Δr pasa a ser un vector infinitesimal dr cuya direcci´on es tangente a la curva. Por otro lado, su m´odulo coincide con ds, para ds 0, dado que ´esta es la distancia entre dos puntos infinitamente pr´oximos. Por tanto, dr/ds es un vector unitario tangente (figura 2.7), de modo que V = vT T, (2.10) siendo T = dr ds ; vT = ds dt . (2.11) vT es la proyecci´on de la velocidad en la direcci´on de T, la cual puede ser positiva o negativa seg´un que la coordenada de arco s aumente o disminuya con el tiempo. Por otro lado, |vT | = |ds dt | = v. (2.12) 2.3 Aceleraci´on Sean V (t) y V (t+Δt) las velocidades del punto m´ovil P respecto a un observador O en los instantes de tiempo t y t + Δt. Se define la aceleraci´on media en dicho intervalo, al vector am = ΔV Δt , (2.13) siendo ΔV = V (t+Δt) − V (t). La aceleraci´on instant´anea, a la que a partir de ahora llamaremos simplemente aceleraci´on en el instante t, se define como: a = lim Δt→0 ΔV Δt = dV dt = d2r dt2 . (2.14) Teniendo en cuenta (2.6) y (2.7), tenemos a = axı + ay + azk, (2.15) siendo
- 8. 22 CAP´ITULO 2. CINEM´ATICA DEL PUNTO V a a V V a Figura 2.8: La aceleraci´on es un vector cuyo sentido est´a dirigido hacia el lado c´oncavo de la curva. ax = dvx dt = d2x dt2 ; ay = dvy dt = d2y dt2 ; az = dvz dt = d2z dt2 . (2.16) En el Sistema Internacional la aceleraci´on se mide en m/s2. El m´odulo de a viene dado por: a = a2 x + a2y + a2z . (2.17) 2.4 Componentes tangencial y normal de la ace-leraci ´on Como la velocidad var´ıa tanto en m´odulo como en direcci´on, la aceleraci´on, que representa la variaci´on instant´anea de la velocidad por unidad de tiempo, no es en general un vector tangente a la curva. Por otro lado, como la velocidad var´ıa en el sentido en que se curva la trayectoria, a apunta siempre hacia la parte c´oncava de la misma. A continuaci´on, vamos a descomponer la aceleraci´on en sus componentes tan-gencial y normal, para lo cual partiremos de la expresi´on de la velocidad dada por (2.10). Derivando respecto al tiempo, tenemos: a = dV dt = dvT dt T + vT dT dt = dvT dt T + v2 dT ds , (2.18) donde hemos tenido en cuenta que dT dt = dT ds vT ; v2T = v2. Por otro lado, al ser T unitario, entonces T · T = 1. Derivando respecto al arco se obtiene f´acilmente: T · dT ds = 0, (2.19)
- 9. 2.4. COMPONENTES TANGENCIAL Y NORMAL DE LA ACELERACI ´ ON 23 es decir, dT/ds es perpendicular a T. En geometr´ıa diferencial este vector se expresa de la forma siguiente: dT ds = K(s) N. (2.20) N es un vector unitario perpendicular a la trayectoria y que apunta hacia la parte c´oncava de la misma. Se denomina vector normal. Por otro lado, K(s) = dT ds . (2.21) K se denomina curvatura y a su inverso ρc(s) = 1/K(s) , radio de curvatura. lc (P1) C1 P1 P2 C2 lc (P2) Figura 2.9: Interpretaci´on geom´etrica de la curvatura y del radio de curvatura. El centro de curvatura C var´ıa de un punto a otro de la trayectoria. La distancia entre C y el punto P es el radio de curvatura, el cual es inversamente proporcional a la curvatura. El significado geom´etrico de la curvatura es el siguiente: como T es unitario, el m´odulo de su derivada mide lo que var´ıa su direcci´on en cada punto. Si |dT/ds| es muy grande, ello significa que la trayectoria se “curva” mucho en el punto conside-rado. Para dar una interpretaci´on geom´etrica a ρc tendr´ıamos que tener conocimientos de geometr´ıa diferencial que se escapan de los l´ımites de este tema. No obstante, se puede demostrar que esta cantidad representa el radio de la circunferencia que mejor se aproxima a la curva en cada punto, denominada circunferencia osculatriz. Su centro, denominado centro de curvatura, est´a situado en la direcci´on normal a la trayectoria en cada punto, y a una distancia ρc del mismo (figura 2.9). N´otese que tanto K como ρc son caracter´ısticas intr´ınsecas a cada trayectoria, puesto que se definen a partir de la variaci´on del vector unitario tangente, el cual no depende del tiempo sino de la forma de la curva. Por ejemplo, en el caso de una trayectoria rectil´ınea K = 0 dado que T es un vector constante y su derivada es igual a cero; el radio de curvatura en este caso tiende a infinito. Otro ejemplo es el
- 10. 24 CAP´ITULO 2. CINEM´ATICA DEL PUNTO de una trayectoria circular. En este caso la direcci´on del vector tangente var´ıa de la misma forma en todos los puntos siendo la curvatura igual a una constante; el radio de curvatura es constante e igual al de la propia circunferencia (figura 2.10). X Y Z r o T k= 0 R= lc C T Figura 2.10: La curvatura representa como var´ıa la direcci´on del vector tangente a la trayectoria en cada punto de la misma. En el caso de una recta K = 0, y en el caso de una trayectoria circular K = cte. Teniendo en cuenta (2.18) y (2.20), la aceleraci´on puede expresarse a partir de sus componentes tangencial y normal como a = dvT dt T + v2 ρc N ≡ aT +aN, (2.22) donde aT = dvT dt T = d2s dt2 T, (2.23) y aN = v2 ρc N. (2.24) aT y aN se denominan respectivamente 3 aceleraci´on tangencial y aceleraci´on normal. El m´odulo de la aceleraci´on tangencial es igual al m´odulo de la derivada de la celeridad respecto al tiempo: |aT | = |dvT /dt| = |dv/dt|. (2.25) 3Las expresiones de la velocidad y la aceleraci´on a partir de los vectores tangente y normal se suelen denominar “intr´ınsecas”. En general, dada una curva en el espacio, se puede definir en cada punto de la misma una base formada por tres vectores unitarios perpendiculares entre s´ı. Ya hemos visto dos de estos vectores: el vector tangente T, y el vector normal N . El tercer vector, denominado binormal, se define como B = T × N. Estos tres vectores forman en cada punto de la curva un triedro denominado en Geometr´ıa Dife-rencial Triedro de Frenet o Triedro Intr´ınseco. A las componentes de la velocidad y la aceleraci´on en esta base se las denomina componentes intr´ınsecas. Vemos que ninguno de estos vectores tiene componente seg´un la binormal, sino que siempre est´an contenidos en el plano constituido en cada punto de la curva a partir de los vectores tangente y normal. A este plano se le denomina osculador.
- 11. 2.4. COMPONENTES TANGENCIAL Y NORMAL DE LA ACELERACI ´ ON 25 X Y Z r o T V aT aN N a Figura 2.11: Componentes tangencial y normal de la aceleraci´on. Por otro lado, el signo de dv/dt viene determinado por la proyecci´on de la ace-leraci ´on sobre la direcci´on de la velocidad. Para verlo, s´olo tenemos que utilizar las expresiones intr´ınsecas de la velocidad y la aceleraci´on dadas por (2.10) y (2.22): a · V = vT dvT dt = v dv dt → a · V v = dv dt . (2.26) De esta forma, cuando a · V es 0 ( 0), entonces dv/dt es 0 ( 0), y el movimiento se denomina acelerado, (retardado). Cuando a·V = 0, entonces dv/dt = 0 y el movimiento se denomina uniforme (figura 2.12). V a V a V a Figura 2.12: El movimiento es acelerado, retardado o uniforme en cada punto de-pendiendo del ´angulo que forman la velocidad y la aceleraci´on. Como las aceleraciones tangencial y normal son perpendiculares, el m´odulo de la aceleraci´on es
- 12. 26 CAP´ITULO 2. CINEM´ATICA DEL PUNTO |a| = |aT |2 + |aN|2 = dv dt 2 + v2 ρc 2 . (2.27) 2.5 Movimiento relativo Vamos a investigar ahora c´omo est´an relacionados los movimientos de un mismo punto observados desde dos sistemas de referencia en movimiento relativo. Pero obs´ervese que si los sistemas de referencia est´an en movimiento relativo deber´ıamos investigar primero este movimiento. ¡Y ese es un problema, no de cinem´atica del punto, sino del s´olido r´ıgido (un sistema de referencia es, o define, un s´olido r´ıgido)! El estudio de la cinem´atica del s´olido r´ıgido rebasa con creces las pretensiones de nuestro breve repaso de la cinem´atica del punto, y no lo vamos a abordar en su m´axima generalidad. En vez de ello, nos vamos a limitar al caso m´as sencillo posible: El movimiento de traslaci´on rectil´ınea. Consideremos dos sistemas de referencia, que denominaremos “0” y “1”, en mo-vimiento relativo de traslaci´on rectil´ınea en una direcci´on arbitraria, y un punto P que se mueve con un movimiento arbitrario que, en general, ser´a distinto seg´un lo observe “0” ´o “1”. 1 Z1 Y1 X1 O1 0 X0 Y0 Z0 P O Figura 2.13: El movimiento de P puede observarse desde “0” ´o “1”. Consideremos primero el movimiento de “0” respecto de “1”. Sea P0 un punto cualquiera perteneciente a “0” (usamos el sub´ındice para distinguirlo del punto P arbitrario, que no pertenece a “0”). La posici´on del origen O cambia con el tiempo
- 13. 2.5. MOVIMIENTO RELATIVO 27 y la de P0 tambi´en, sin embargo, el hecho de que el movimiento de “0” respecto a “1” sea una traslaci´on significa que el vector −−→ OP0 no cambia con el tiempo, es decir: d −−→ OP0 dt = 0. (2.28) A partir de aqu´ı se puede deducir que en el movimiento de “0” respecto de “1” todos los puntos tienen la misma velocidad. En efecto, derivando con respecto al tiempo la igualdad: −−−→ O1P0 = −−→ O1O + −−→ OP0, (2.29) y teniendo en cuenta (2.28) nos queda: d −−−→ O1P0 dt = d −−→ O1O dt . (2.30) Es decir, las velocidades de P0 y O respecto de 1 son iguales: vP0 1 = vO 1 . (2.31) En esta expresi´on el sub´ındice indica el sistema desde el que se observa la velocidad. Deriv´andola con respecto al tiempo descubrimos que en el movimiento de traslaci´on de “0” respecto de “1” todos los puntos tienen la misma aceleraci´on: aP0 1 = aO1 . (2.32) Ahora ya estamos en condiciones de investigar c´omo se relacionan los movimien-tos de P en “0” y “1”. Para ello vamos a partir de la igualdad: −−→ O1P = −−→ O1O + −→ OP. (2.33) Deriv´andola con respecto al tiempo: vP 1 = vO 1 +vP 0 , (2.34) y volvi´endola a derivar: aP1 = aO1 +aP0 . (2.35) Las ecuaciones (2.34) y (2.35) constituyen el resultado que ´ıbamos buscando. Se pueden reescribir de un modo mas f´acil de recordar si sustituimos en ellas las velocidades y aceleraciones de O mediante las ecuaciones (2.31) y (2.32): vP 1 = vP 0 +vP0 1 (2.36) aP1 = aP0 +aP0 1 . (2.37)
- 14. 28 CAP´ITULO 2. CINEM´ATICA DEL PUNTO Estas ecuaciones nos dicen que la velocidad (aceleraci´on) de P vista desde “1” es la misma que la velocidad (aceleraci´on) de P vista desde “0” m´as la velocidad (aceleraci´on) que tendr´ıa P si estuviera ligado r´ıgidamente a “0” (es decir, P0) vista desde “1”.