2. This project presents the advanced robotic pick and place arm that uses dc motors to drive arms, a
microcontroller to control the movement of the arm and a web application to allow the user to interface
with the robotic arm. This arm robot is used to move an object from one location to another via the web
application.
Robot is an integral part in automating the flexible manufacturing system that one greatly in demand
these days. Robots are now seen more than machines; “they have become the solution of the future as
cost labor wages and customers’ demand. (MOHAMED NAUFAL BIN OMAR, 2007)”.
Two main controllers are used in this project. One is called the pcduino; it is the one responsible for
hosting our web application which is used by the user in order to control the robot arm and send digital
signals to the second controller.
The second one is the microcontroller pic16f27a which receives signal from the pcduino and executes
proper commands to drive the arm to perform the user’s request.
The design of this project was broken into two main parts which was the software and hardware. The
software part consisted of writing code for the web application and the microcontroller (PIC16F627A).
The hardware part consisted of building a circuit with motor bridge to read signal coming out from
pcduino; translates the signal in the microcontroller and then send commands to the dc motors.
The dc motors are controlled by the microcontroller by making use of the pulse width modulation (PWM)
which is a method used by many microcontrollers to generate analog through digital pins. This method
contributed in controlling the speed of the motors located in the robot arm joints.
3. Due to the incapacity of the human to satisfy the demands, research and development of future robots is moving
at very rapid pace due to the constantly improving and upgrading of the quality standards of products.
Robots replaced human to perform routine tasks which were dangerous and dull. So this decision in the world of
advanced technology today helps the automation to increase production capability, product quality and lower
production cost.
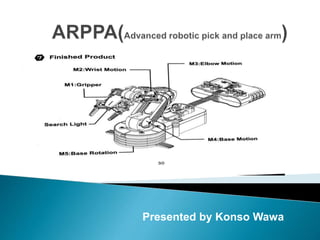
This project is called advanced robotic pick and place arm which consist of controlling the hardware arm robot via
software. This project describes the design and implementation of a robotic arm that is capable to pick an object
through the gripper that is attached to it and place the object accordingly to the coordinated places.
The system design was divided into two parts: the web application and the microcontroller circuit. The web
application is hosted on the pcduino which is a mini pc which has an arduino emulator and the microcontroller
which controls the motor bridge to drive the motors on the arm.
The pcduino and the pic16f27a will have a bi-directional communication in order to exchange data for proper
functioning.
This project brings light in the industrial, automotive manufacturing to understand the concept behind the arm
robot, it is going to help student who desire to build automatic robot understand the components and process
needed. The movement of the robotic arm will be discussed in the later stage.
4.
5.
6.
7.
8. Many robotic pick and place arm projects have been done with different
approaches. This section focuses on discussing different approaches used to
design arm robot and contrasts with the approach used in this project.
Many have used the microcontroller as the main controller and with buttons to
control the movements of the robot arm. This is considered as the traditional
approaches whereby users press buttons to move the arm robot accordingly.
This approach becomes very dangerous because the user will have to stand
physically in front of the robot because of the nature of the control.
This project makes use of the web application hosted on the pcduino, and using
the wireless network to share the connection. The reason of my choice is to
secure the users of the arm robot. This approach does not require the user to
be in the same physical location with the robot.
This approach secures the environment and let the robot perform its function
safely and without any interaction.
9.
10. C Language: This language is chosen based on my knowledge. I have wide
experience in this language and it is simple to write large program. This
language is going to be the main programming language for the pic16f627A
microcontroller which will control the movement of the robotic arm.
HTML: Hypertext markup language is a client-side language used to create web
interface. To have a nice looking application for our arm robotic, this language is
going to be used for the design.
PHP: It is the server-side language to create communication between our web
server and the client-side, as well as the external headers of our pcduino.
JavaScript: This language is not to confuse with java language, java script
(JS) is a client-side language used to create some behavior for the web pages
or application. In this case, many behaviors will be derived from this language.
11. RA5 RA4 RA3 RA2 PORT ACTION DESCRIPTION
0 0 0 0 CLEAR STOP
0 0 0 1 RB0 WMU Move Wrist Upward
0 0 1 0 RB1 WMD Move Wrist Downward
0 0 1 1 RB4 EMU Move Elbow Upward
0 1 0 0 RB5 EMD Move Elbow Downward
0 1 0 1 RB6 UP Move Base Upward
0 1 1 0 RB7 DOWN Move Base Downward
0 1 1 1 RA6 LEFT Move Base left
1 0 0 0 RA7 RIGHT Move Base right
1 0 0 1 RA0 GO Open gripper
1 0 1 0 RA1 GC Close gripper
1 0 1 1
1 1 0 0
1 1 0 1
1 1 1 0
1 1 1 1
12. This project is a combination of electronic, electrical
and programming knowledge which consist of
assembling the robot arm parts to form a nice
architectural designed arm, building a complete and
useful circuit for the microcontroller and other
components needed to drive the signal to the
motors; and programming the microcontroller
following the goal and specification and a user
interface to make the system more easier to use.
13. QUESTIONS
?
TSHWANE UNIVERSITY OF TECHNOLOGY
BACHELOR IN COMPUTER ENGINEERING SYSTEMS
KONSO WAWA
209319969