Robot clasifica bolas
•Als PPT, PDF herunterladen•
1 gefällt mir•1,187 views

Este documento describe un robot diseñado para clasificar bolas según su color, ya sea blanco o negro. El robot está controlado por un programa de Logo que se comunica con la máquina a través de sensores de luz y un dedo mecánico. El robot usa un motor principal para mover un tambor que transporta un brazo aspirador entre un depósito de bolas blancas y uno de bolas negras. Los sensores detectan el color de cada bola y guían el brazo hacia el depósito correspondiente.
![DESCRIPCIÓN ,[object Object],[object Object],[object Object]](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Empfohlen
Weitere ähnliche Inhalte
Ähnlich wie Robot clasifica bolas
Ähnlich wie Robot clasifica bolas (16)
Mehr von jurafg
Mehr von jurafg (13)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
Robot clasifica bolas
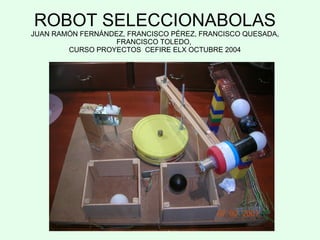
- 1. ROBOT SELECCIONABOLAS JUAN RAMÓN FERNÁNDEZ, FRANCISCO PÉREZ, FRANCISCO QUESADA, FRANCISCO TOLEDO, CURSO PROYECTOS CEFIRE ELX OCTUBRE 2004
- 3. PARTES DE LA MÁQUINA Motor Principal Rampa Tambor Aspirador Brazo Depósito blancas Depósito negras
- 5. Final de carrera NC Levas
- 8. Ventosas porta-LDR Dedo mecánico
- 11. PROGRAMA CON LOGO para ignicion cargadecorado "222.bmp espera 30 cargadecorado "333.bmp espera 30 fin para comun cargadecorado "000.bmp espera 600 cargadecorado "100.bmp espera 600 cargadecorado "110.bmp espera 150 cargadecorado "100.bmp espera 150 cargadecorado "101.bmp espera 150 fin para esnegra cargadecorado "110.bmp espera 100 cargadecorado "100.bmp espera 200 cargadecorado "000.bmp espera 200 cargadecorado "010.bmp espera 100 cargadecorado "000.bmp espera 300 fin para esblanca cargadecorado "444.bmp espera 400 cargadecorado "010.bmp espera 250 cargadecorado "000.bmp espera 600 haz "a leecar fin para seleccionabolas1 comun comprueba tecla? sicierto [esblanca] sifalso [esnegra] fin seleccionabolas1 para seleccionabolas repite 10 [ignicion] comun comprueba tecla? sicierto [esblanca] sifalso [esnegra] fin