Dexterous In-hand Manipulation by OpenAI
•
0 likes•156 views

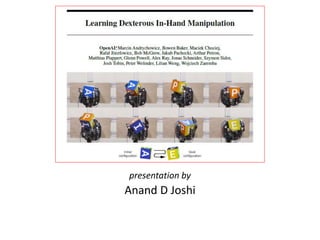
OpenAI has used Reinforcement Learning to train a humanoid robotic hand to rotate a cube to achieve any desired orientation. This is discussed in arXiv:1808.00177, 2019 and in the blog <openai.com/blog/learning dexterity/>. These slides present results from the paper along with a few important concepts in reinforcement learning I learnt through many other sources.

Recommended
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Dexterous In-hand Manipulation by OpenAI
Similar to Dexterous In-hand Manipulation by OpenAI (20)
Recently uploaded
Recently uploaded (20)
Dexterous In-hand Manipulation by OpenAI
- 1. presentation by Anand D Joshi
- 2. Outline ▪ Introduction ▪ Goal the humanoid hand, ShadowHand ▪ Reinforcement Learning Actor-Critic Approach Proximal Policy Optimization Generalized Advantage Estimator ▪ Methodology ▪ Results ▪ Conclusions
- 3. Introduction ▪ Research in control of robotic devices is a subject with great application across a number of sectors ▪ Prior methods have completely trained and tested either on simulations alone or on physical robots alone ▪ However, simulations do not transfer with sufficient accuracy to real world, while training on physical robots require years of experience to perform satisfactorily ▪ In this study, training is carried out on simulated robots, and the policies learned in the process are deployed on a physical robot ▪ Without explicit instructions to the robot on how to perform an action, the problem of completing pre-defined tasks is well-suited for Reinforcement Learning (RL)
- 4. Goal ▪ To train a robotic hand, ShadowHand, in dexterous manipulation of an object, like a block ▪ 24 joints involving 20 actuated degrees of freedom and 4 under-actuated movements ▪ PhaseSpace sensors capture fingertip motion ▪ Sensors record relative angles between joints ▪ RGB cameras used for pose estimation ▪ Touch sensors in the hand not used ▪ Simulation of the Hand done with MuJoCo physics engine ▪ Model of Hand is based on the robotic environment OpenAI Gym, a toolkit for developing Reinforcement Learning (RL) algorithms ▪ Rendering of simulations carried out with Unity ShadowHand holding a bulb All the joints of ShadowHand
- 5. Reinforcement Learning ▪ RL trains an agent in some environment to take an action in a given state resulting in a new state and a reward from the environment, with the aim to maximize the cumulative reward For the ShadowHand robot: ▪ State is a 60D space describing angles and velocities of all Hand joints and position, orientation and velocities of object in hand. ▪ Goal is to achieve the desired orientation with an accuracy of 23° ▪ Action is a 20D space corresponding to desired angles of Hand joints. Each coordinate is discretized and specified relative to current joint angle, and rescaled to the range [-1,1] ▪ Reward at time-step 𝑡 is 𝑟𝑡 = 𝑑 𝑡– 𝑑 𝑡+1 where 𝑑 𝑡+1 is rotation angle between desired and current orientation before transition and 𝑑 𝑡 is the angle after transition
- 6. ▪ Policy is function that maps the state to an action and a new state ▪ Value Function describes how good is the agent’s state or action, and is used to predict future rewards ▪ Model is the agent’s representation of environment ▪ Typically, to choose the actions that give the most possible reward RL agents are categorized as value-based (dynamic programming), where they follow value function without explicit policy or policy- based (policy optimization), where they follow a policy without explicit value function ▪ The Actor-Critic approach combines and tries to get best of both the approaches
- 7. Actor-Critic Approach ▪ The Hand is trained where simulations have full access to Hand state and environment ▪ Ideally, for physical robot to do as well as during simulation, it should have the same full access to Hand state and environment, which is very infeasible in a real world setup ▪ Thus we cannot rely on training in simulation alone ▪ Therefore we have Actor-Critic approach, where ▪ in simulation, Critic takes full state as input and learns the state to action mapping much faster ▪ in real world, Actor sees only partial observations ▪ To generalize the policy and vision to reality, Domain Randomization makes use of a large variety of randomized experiences without an accurate modelling of the real world ▪ Randomizations over mass, dimensions, friction, noise, colour, motor backlash, vision, etc., are carried out
- 8. Generalized Advantage Estimator (GAE) ▪ In policy gradient (PG) methods, the aim is to maximize the return, i.e. maximize E[∇ log 𝜋 𝑎 𝑡 𝑠𝑡 𝑓(𝑥)] where 𝑓(𝑥) is a value function, and E denotes the expectation operator ▪ To simplify the calculation of future rewards as per policy 𝜋, we use a discount factor, 𝛾 (0 < 𝛾 < 1), and define the value functions as state-value function: 𝑉 𝜋(𝑠) = E[σ𝑖=0 ∞ 𝛾 𝑖 𝑟𝑖 | 𝑠0 = 𝑠] action-value function: 𝑄 𝜋 (𝑠, 𝑎) = E[σ𝑖=0 ∞ 𝛾 𝑖 𝑟𝑖 | 𝑠0 = 𝑠, 𝑎0 = 𝑎] ▪ The advantage function then 𝐴 𝜋 𝑠, 𝑎 = 𝑄 𝜋 𝑠, 𝑎 − 𝑉 𝜋(𝑠) tells us how much an action is better than the one prescribed by policy alone ▪ Often, the value function at time 𝑡 needs to be estimated as, 𝑉𝑡 = σ𝑖=𝑡 ∞ 𝛾 𝑖−𝑡 𝑟𝑖 = 𝑟𝑡 + 𝛾𝑟𝑡+1 + 𝛾2 𝑟𝑡+2 + ⋯ which can be written as 𝑉𝑡 = 𝑟𝑡 + 𝛾 𝑉𝑡+1 or 𝑉𝑡 = 𝑟𝑡 + 𝛾2 𝑟𝑡+2 + 𝛾2 𝑉𝑡+2 in general, 𝑉𝑡 (𝑘) = σ𝑖=𝑡 𝑡+𝑘−1 𝛾 𝑖−𝑡 𝑟𝑖 + 𝛾 𝑘 𝑉 𝑠𝑡+𝑘 ≈ 𝑉 𝜋 𝑠𝑡, 𝑎 𝑡 is the 𝑘-step return estimator
- 9. ▪ Now, the 𝑘-step advantage estimator is defined as, መ𝐴 𝑡 (𝑘) = σ𝑖=𝑡 𝑡+𝑘−1 𝛾 𝑖−𝑡 𝑟𝑖 + 𝛾 𝑘 𝑉 𝑠𝑡+𝑘 − 𝑉 𝑠𝑡 = 𝑉𝑡 𝑘 − 𝑉 𝑠𝑡 where 𝑉 𝑠𝑡 is the baseline, which lowers the expectation in the event of bad actions ▪ The Generalized Advantage Estimator (GAE) is then defined as the exponentially weighted average of the 𝑘-step estimators መ𝐴 𝑡 𝐺𝐴𝐸 = (1 − λ) መ𝐴 𝑡 (1) + λ መ𝐴 𝑡 (2) + λ2 መ𝐴 𝑡 (3) + ⋯ simplified to, መ𝐴 𝑡 𝐺𝐴𝐸 = σ𝑙=0 ∞ (𝛾λ)𝑙 𝛿𝑡+𝑙 𝑉 where 𝛿𝑡+𝑙 𝑉 = 𝑟𝑡 + 𝛾𝑉 𝑠𝑡 + 1 − 𝑉(𝑠𝑡) is the TD residual term ▪ Using the መ𝐴 𝑡 𝐺𝐴𝐸 , it is possible to estimate value functions, for all the states in an episode.
- 10. Proximal Policy Optimization (PPO) ▪ A standard PG method typically performs one gradient update in the policy direction for every data sample ▪ The maximization objective can be represented as a loss function, 𝐿 𝑃𝐺 𝜃 = E[∇ log 𝜋 𝜃 𝑎 𝑡 𝑠𝑡 መ𝐴 𝑡 𝐺𝐴𝐸 ] where the policy 𝜋 is parameterized by 𝜃 (e.g. weights of a neural network) ▪ If 𝜃 𝑜𝑙𝑑 is the vector of policy parameters before an update, then 𝑟𝑡 𝜃 = 𝜋 𝜃(𝑎 𝑡|𝑠 𝑡) 𝜋 𝜃 𝑜𝑙𝑑 (𝑎 𝑡|𝑠 𝑡) is the probability ratio of taking a given action as per current policy to taking the action as per old policy. ▪ The loss function can now be modified as 𝐿 𝑃𝑃𝑂 = E min 𝑟𝑡 𝜃 መ𝐴 𝑡 𝐺𝐴𝐸 , clip 𝑟𝑡 𝜃 , 1 − ε, 1 + ε መ𝐴 𝑡 𝐺𝐴𝐸 where the clip function maintains 𝑟𝑡 𝜃 between 1 − ε and 1 + ε to prevent an excessively large update to the policy, with ε being a hyperparameter, usually about 0.2
- 11. Methodology ▪ Pool of 384 rollout workers with 16 CPU cores each, are used, while optimization is performed on a single machine with 8 GPUs ▪ Current version of policy is used by a worker on a sample from the distribution of randomizations ▪ States are observed and actions determined by the policy network, while returns are predicted by value network. These two make up the PPO. The two networks have the same architecture (LSTM), but independent parameters. ▪ An episode ends when either 50 successive orientations are achieved, policy fails to achieve desired orientation within 8 s, or if the object is dropped ▪ For better transfer to real world, simulated object pose is determined from rendered images by a pose estimator CNN. 3 RGB cameras are used on the physical robot for this
- 12. ▪ Distributed infrastructure during training of rollout workers ▪ Workers randomly connect to a Redis server to which policy and parameters are communicated ▪ Experiences are sent from Redis to GPU through a buffer ▪ Gradients are computed in each GPU locally before the MPI averages across all threads to update the network parameters ▪ The policy network (left) and value network (right) for determining actions and rewards respectively ▪ Normalization block ensures uniform mean and std. dev. for all observations
- 13. Results ▪ The ShadowHand policy learns several grasping and manipulating strategies without any incentivization or demonstration ▪ Grasps found in human adults were rediscovered, and adapted as per the Hand’s limitations and strengths ▪ PhaseSpace trackers on fingers perform better than vision-based pose estimation in both simulation and real world ▪ Policy learned on a cube when applied to differently shaped object performs much better in simulation than in real world
- 14. ▪ Randomized training performs better in real world with 13 median rotations ▪ Without any randomization, median rotations achieved reduces to 0 ▪ Median orientations of PhaseSpace (13) and Vision tracking (11.5) are comparable after randomized training Training Hand with all randomizations requires more time Training with memory enables the Hand to achieve more rotations faster ▪ Keeping the batch size per GPU fixed, having 16 GPUs and 12,288 rollout CPU cores is the optimum ▪ Markers for object orientation are not always possible in real world ▪ However, prediction error in orientation in real world is still less than noise during observations
- 15. Conclusions ▪ The success is mainly due to (1) domain randomizations, (2) policy with memory (LSTM), and (3) large scale distributed RL ▪ Although equipped with tactile and pressure sensors, they were used neither in simulation nor in real world. This is because a lower dimensional state space is easier to model ▪ Only a solid cube was used in simulations, but the policies were general enough to be used with other objects in the real world, but with lower levels of accuracy ▪ This work demonstrates that current RL algorithms can be used effectively for real-world problems
- 16. References Literature ▪ OpenAI, Andrychowicz M., et al., ‘Learning Dexterous In-Hand Manipulation’, arXiv preprint arXiv:1808.00177, 2019 ▪ Schulman J., Moritz P., Levine S., Jordan M. & Abbeel P., ‘High-Dimensional Continuous Control using Generalized Advantage Estimation’, arXiv preprint arXiv:1506.02438, 2015 ▪ Schulman J., Wolski F., Dhariwal P., Radford A. & Klimov O., ‘Proximal Policy Optimization Algorithms’, arXiv preprint arXiv:1707.06347, 2017 ▪ Mnih V., Kavukcuoglu K., et al., ‘Human-level Control through Deep Reinforcement Learning’, Nature, 2015, 518, p. 529 Blogs ▪ openai.com/blog/learning-dexterity/ ▪ karpathy.github.io/2016/05/31/rl/ ▪ openai.com/blog/openai-baselines-ppo/ ▪ openai.com/five/ Youtube ▪ RL course by David Silver (youtu.be/2pWv7GOvuf0) ▪ John Schulman: Deep Reinforcement Learning (youtu.be/aUrX-rP_ss4) ▪ Arxiv Insights (youtu.be/JgvyzIkgxF0)