
Recomendados
Más contenido relacionado
Similar a EXPERIENCIA 5.pdf
Similar a EXPERIENCIA 5.pdf (20)
Más de VLAZZXOf1
Más de VLAZZXOf1 (10)
Último
Último (20)
EXPERIENCIA 5.pdf
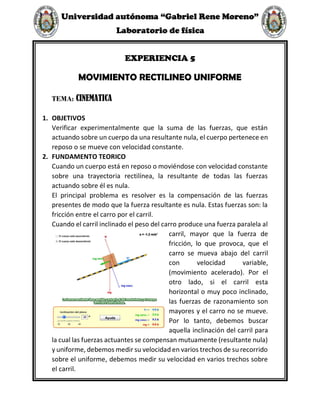
- 1. Universidad autónoma “Gabriel Rene Moreno” Laboratorio de física MOVIMIENTO RECTILINEO UNIFORME TEMA: CINEMATICA 1. OBJETIVOS Verificar experimentalmente que la suma de las fuerzas, que están actuando sobre un cuerpo da una resultante nula, el cuerpo pertenece en reposo o se mueve con velocidad constante. 2. FUNDAMENTO TEORICO Cuando un cuerpo está en reposo o moviéndose con velocidad constante sobre una trayectoria rectilínea, la resultante de todas las fuerzas actuando sobre él es nula. El principal problema es resolver es la compensación de las fuerzas presentes de modo que la fuerza resultante es nula. Estas fuerzas son: la fricción entre el carro por el carril. Cuando el carril inclinado el peso del carro produce una fuerza paralela al carril, mayor que la fuerza de fricción, lo que provoca, que el carro se mueva abajo del carril con velocidad variable, (movimiento acelerado). Por el otro lado, si el carril esta horizontal o muy poco inclinado, las fuerzas de razonamiento son mayores y el carro no se mueve. Por lo tanto, debemos buscar aquella inclinación del carril para la cual las fuerzas actuantes se compensan mutuamente (resultante nula) y uniforme, debemos medir su velocidad en varios trechos de su recorrido sobre el uniforme, debemos medir su velocidad en varios trechos sobre el carril. EXPERIENCIA 5
- 2. La cinemática (del griego κινέιν kinéin 'mover, desplazar') es la rama de la mecánica que describe el movimiento de los objetos sólidos sin considerar las causas que lo originan (las fuerzas) y se limita, principalmente, al estudio de la trayectoria en función del tiempo. Para ello utiliza velocidades y aceleraciones, que describen cómo cambia la posición en función del tiempo. La velocidad se determina como el cociente entre el desplazamiento y el tiempo utilizado, mientras que la aceleración es el cociente entre el cambio de velocidad y el tiempo utilizado. El vocablo cinemático fue creado por André-Marie Ampère, quien delimitó el contenido de esta disciplina y aclaró su posición dentro del campo de la mecánica. Desde entonces, la cinemática ha continuado su desarrollo hasta adquirir una estructura propia. Con la teoría de la relatividad especial de Albert Einstein en 1905, se inició una nueva etapa, la cinemática relativista, donde el tiempo y el espacio no son absolutos, y sí lo es la velocidad de la luz. ELEMENTOS BASICOS Los elementos básicos de la cinemática son el espacio, el tiempo y un móvil. ESPACIO: En la mecánica clásica, se admite la existencia de un espacio absoluto, es decir, un espacio anterior a todos los objetos materiales e independientes de la existencia de estos. Este espacio es el escenario donde ocurren todos los fenómenos físicos, y se supone que todas las leyes de la física se cumplen rigurosamente en todas las regiones del mismo. El espacio físico se representa en la mecánica clásica mediante un espacio euclídeo.
- 3. TIEMPO: Análogamente, la mecánica clásica admite la existencia de un tiempo absoluto que transcurre del mismo modo en todas las regiones del universo y que es independiente de la existencia de los objetos materiales y de la ocurrencia de los fenómenos físicos. MOVIL: El móvil más simple que se puede considerar es el punto material o partícula; cuando en la cinemática se estudia este caso particular de móvil, se denomina Cinemática de la partícula, y cuando el móvil bajo estudio es un cuerpo rígido se lo puede considerar un sistema de partículas y hacer extensivos análogos conceptos; en este caso se le denomina cinemática del sólido rígido o del cuerpo rígido. SISTEMA DE COORDENADAS En el estudio del movimiento, los sistemas de coordenadas más útiles se encuentran viendo los límites de la trayectoria a recorrer o analizando el efecto geométrico de la aceleración que afecta al movimiento. Así, para describir el movimiento de un talón obligado a desplazarse a lo largo de un aro circular, la coordenada más útil sería el ángulo trazado sobre el aro. Del mismo modo, para describir el movimiento de una partícula sometida a la acción de una fuerza central, las coordenadas polares serían las más útiles. En la gran mayoría de los casos, el estudio cinemático se hace sobre un sistema de coordenadas cartesianas, usando una, dos o tres dimensiones, según la trayectoria seguida por el cuerpo.
- 4. TIPOS DE MOVIMIENTOS: Movimiento rectilíneo El movimiento rectilíneo es aquel en el que el móvil3 describe una trayectoria en línea recta. Movimiento rectilíneo uniforme En el movimiento rectilíneo uniforme (MRU) el móvil se desplaza por una recta a velocidad V constante; la aceleración a es cero todo el tiempo. Esto corresponde al movimiento de un objeto lanzado en el espacio fuera de toda interacción, o al movimiento de un objeto que se desliza sin fricción. Movimiento rectilíneo uniformemente acelerado o variado En este movimiento la aceleración es constante, por lo que la velocidad de móvil varía linealmente y la posición cuadráticamente con tiempo. Movimiento armónico simple Es un movimiento periódico de vaivén, en el que un cuerpo oscila a un lado y a otro de una posición de equilibrio en una dirección determinada y en intervalos iguales de tiempo. Matemáticamente, la trayectoria recorrida se expresa en función del tiempo usando funciones trigonométricas, que son periódicas. Movimiento parabólico El movimiento parabólico se puede analizar como la composición de dos movimientos rectilíneos distintos: uno horizontal (según el eje x) de velocidad constante y otro vertical (según eje y) uniformemente acelerado, con la aceleración gravitatoria; la composición de ambos da como resultado una trayectoria parabólica. Movimiento circular En la práctica es un tipo muy común de movimiento: Lo experimentan, por ejemplo, las partículas de un disco que gira sobre su eje, las de una noria, las de las agujas de un reloj, las de las paletas de un ventilador, etc. Para el caso de un disco en rotación alrededor de un eje fijo, cualquiera de sus puntos describe trayectorias circulares, realizando un cierto número de vueltas durante determinado intervalo de tiempo.
- 5. Movimiento circular uniforme Se caracteriza por tener una velocidad variable o estructural constante por lo que la aceleración angular es nula. La velocidad lineal de la partícula no varía en módulo, pero sí en dirección. La aceleración tangencial es nula; pero existe aceleración centrípeta (la aceleración normal), que es causante del cambio de dirección. Movimiento circular uniformemente acelerado En este movimiento, la velocidad angular varía linealmente respecto del tiempo, por estar sometido el móvil a una aceleración angular constante. Movimiento armónico complejo Es un tipo de movimiento bidimensional o tridimensional que puede construir como combinación de movimientos armónicos simples en direcciones diferentes. Cuando una estructura se ve sometida a vibraciones el movimiento de un punto material concreto frecuentemente puede modelizarse por un movimiento armónico complejo si la amplitud del movimiento es pequeña. Movimiento de sólido rígido Todos los movimientos descritos anteriormente se refieren a puntos materiales concretos, o corpúsculos, es decir cuerpos físicos cuyas dimensiones pequeñas respecto al tamaño de la trayectoria por lo que pueden aproximarse por puntos materiales. Sin embargo, los cuerpos físicos macroscópicos no son puntuales, en muchas situaciones el movimiento del cuerpo como un todo, requiere una descripción más compleja que la de asumir que todos sus puntos siguen una trayectoria mucho mayor que las distancias entre puntos del cuerpo, por lo que la descripción del cuerpo como punto material es inadecuada y la cinemática del punto material es demasiado simple para describir adecuadamente la cinemática del cuerpo.
- 6. 3. MATERIALES A UTILIZAR 1 carril. 4 tornillos. 2 varillas de soporte. 1 cronometro eléctrico para 200v/50Hz. 1 electroimán de retención. 2 placas de contactos. Interconectar. Fuente de alimentación de baja tensión. Cable de experimentación. Placa receptora. Peso de hidratación. Hilo de pescar. CARRIL TORNILLOS VARILLAS DE SOPORTE CRONOMETRO ELÉCTRICO PLACAS DE CONTACTOS HILO DE PESCAR
- 7. CABLE DE EXPERIMENTACION FUENTE DE ALIMENTACION PLACA RECEPTORA PESO DE HIDRATACIÓN INTERCONECTAR ELECTROIMÁN DE RETENCIÓN
- 8. 4. ESQUEMA DE LA EXPERIENCIA
- 9. Ejercicios: Datos: D = 40 cm D = 0,4 m T = 0,74 cm 𝒗 = 𝒅 𝒕 = 𝒎/𝒔 𝒗 = 𝟎,𝟒𝒎 𝟎,𝟕𝟒𝒄𝒎 = 𝒗 = 𝟎, 𝟓𝟒 𝒎/𝒔 Datos: D = 45 cm D = 0,45 m T = 0,84 cm 𝒗 = 𝒅 𝒕 = 𝒎/𝒔 𝒗 = 𝟎,𝟒𝟓𝒎 𝟎,𝟖𝟒𝒄𝒎 = 𝒗 = 𝟎, 𝟓𝟒 𝒎/𝒔 30cm 40cm 30cm 45cm
- 10. Datos: D = 50 cm D = 0,5 m T = 0,93 cm 𝒗 = 𝒅 𝒕 = 𝒎/𝒔 𝒗 = 𝟎,𝟓𝟎𝒎 𝟎,𝟗𝟑𝒄𝒎 = 𝒗 = 𝟎, 𝟓𝟒 𝒎/𝒔 5. PRECEDIMIENTO El rozamiento del carro sobre el carril se compensa inclinado ligeramente el carril. Para este fin se levanta el extremo izquierdo hasta tal punto que una vez empujado circula uniformemente sobre el carril. La compensación del rozamiento tiene que realizarse lo más cuidadosamente posible. La placa receptora se sujeta de tal modo que la pieza de tracción actúa sobre el carro en un trecho de unos 10 cm. En consecuencia, el carro en los primeros 10 cm tendrá un movimiento acelerado; mientras que, en el resto de su trayectoria, como las fuerzas están compensadas, tendrá un movimiento uniforme (velocidad constante). El trecho x a medir empieza solamente cuando la pieza de tracción deja de actuar. Por este motivo, la escala se desplaza 10 cm a la derecha en comparación con la posición de partida del carro. La tensión aplicada al imán de retención del carro tiene que ser lo más pequeña posible con el fin de que a exista ningún magnetismo realmente eficaz. 30cm 50cm
- 11. El peso de la pieza de tracción llega a 20 p. Se miden los tiempos t que necesita el carro cargado con un disco adicional de 0.5 kg para recorrer diversos tramos. Se repiten 5 veces cada tramo y luego se marca el tiempo del promedio Como ayuda, otra pieza de tracción puede amentar la velocidad del carro y ejecutar medidas de la misma forma. Construir una tabla similar a la siguiente: 6. CONCLUCION Durante toda la experiencia del tema como principio pudimos observar que había una maquina tipo como un autito, pero con un imán encima que pues la demostración de este material era de mostrarnos en que tiempo tocaba la primera placa de contacto ya que al tocarla iniciaba en el cronometro eléctrico y al tocar la segunda paca esta se detenía, se pudo observar 3 tipos de velocidades Como también 3 tipos de espacio ya que en lo que nos dejo claro, para hacer la medición del carril completo no se contaban los primeros 30 cm. Otro de 45 cm. Y un ultimo ejemplo de 50 cm.
- 12. Basándonos en estos datos de cuanto tiempo tardaban en tocar la segunda placa se ocupo el tiempo y el recorrido para realizar los ejercicios ya que nos pedía encontrar el tiempo y la distancia q recorría este peso de hidratación. Me pareció super entretenido este tema ya que se vio algo novedoso a lo que es habitual en las clases, pudimos comprender todo el tema y gracias la explicación de la Aux. no es difícil aprender este tipo de temas.
- 13. MOVIMIENTO RECTILÍNEO UNIFORME ACELERADO TEMA: CINEMATICA 1. OBJETIVOS Estudiar cuantitativamente el movimiento uniforme acelerado de un carril. Estudiar el concepto de la aceleración y le ley de recorridos de tiempo. 2. FUNDAMENTOS Velocidad. La velocidad de una partícula es la rapidez con la que cambia su posición al transcurrir el tiempo. En términos precisos, para definir la velocidad de un objeto debe considerarse no sólo la distancia que recorre por unidad de tiempo sino también la dirección y el sentido del desplazamiento, por lo cual la velocidad se expresa como una magnitud vectorial. 𝒗 − ∆𝒙 ∆𝒕 − 𝒙₂ − 𝒙₁ 𝒕₂ − 𝒕₁ si consideramos X₁ = 0 y t₁ = 0 𝒗 − 𝒙 𝒕 − 𝑫𝒊𝒔𝒕𝒂𝒏𝒄𝒊𝒂 𝑻𝒊𝒆𝒎𝒑𝒐 EXPERIENCIA 6
- 14. la velocidad puede ser constante, variable y/o instantánea. Velocidad constante. Se tiene, cuando la distancia recorrida por un móvil es directamente proporcional al tiempo; o sea: 𝒙 = 𝒗 ∗ 𝒕 𝒕 = 𝒙 𝒕 𝒗 = 𝒙 𝒕 Velocidad variable. Se tiene cuando la velocidad cambia con el tiempo. Si la rapidez o la dirección (o ambas) cambian, entonces, la velocidad cambia. No es lo mismo rapidez constante que velocidad constante. Por ejemplo, si un auto lleva una velocidad de 50 km/h y después de 1 segundo el velocímetro cambia a 55 km/h se puede decir que su velocidad varió 5 km/h en 1 segundo. En otras palabras, el concepto de aceleración siempre se relaciona con un cambio en la velocidad. Velocidad instantánea. Es la velocidad de la partícula en un cierto instante, o en determinado punto de su trayectoria. Es la velocidad media entre dos puntos de la trayectoria en el límite en que el tiempo (y, por ende, el desplazamiento) entre ambos puntos se aproxima a cero. la velocidad instantánea de una partícula o cuerpo es la variación de su posición en un determinado tiempo. Por ejemplo,
- 15. Si una hormiga se mueve en determinado momento 1 centímetro en 1 segundo, su velocidad instantánea habrá sido de v=x1-x0 / t1-t0 = 1cm/s. Velocidad promedio. Cuando las velocidades de las cuales se quieren conocer la velocidad promedio, son constantes, se mantiene que: 𝒗 − 𝒗₂ ∗ 𝒕₁ + 𝒗₂ ∗ 𝒕₂ + 𝒗₃ ∗ 𝒕₃ + 𝒌 𝒕₁ + 𝒕₂ + 𝒕₃ + 𝒌 cuando se tiene un cambio constante de velocidad, la velocidad promedio, es la semisuma de las velocidades inicial (v₃) y la velocidad final (v). 𝒗 = 𝒗₀ + 𝒗 𝟐 Aceleración. La aceleración de una partícula promedio, es la semisuma de las velocidades al transcurrir el tiempo, la aceleración es uniforme (constante), si su velocidad se incrementa con el tiempo de manera constante. Un objeto se tira desde un balcón (entonces su velocidad es inicial es cero) y debido a la fuerza de la gravedad, caerá con una velocidad que irá aumentando hasta ser máxima en el piso. Si se conoce esta velocidad final y el tiempo que tarda en caer, podemos obtener la aceleración (que será la de la gravedad). 𝜶 − 𝒗₂ − 𝒗₁ 𝒕₂ − 𝒕₁ − ∆𝒗 ∆𝒕
- 16. Si: 𝛼 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒 𝒕₁ = 𝟎 𝒕₂ = 𝒕 𝒗₁ = 𝒗₀ 𝒗₂ = 𝒗 entonces tenemos: 𝒙 = 𝒙𝟎 + ( 𝒗𝟎 + 𝒗 𝟐 ) × 𝒕 𝒙 = 𝒙₀ + 𝒗₀ × 𝒕 + 𝟏 𝟐 × 𝜶 × 𝒕² 𝒕 = 𝒗 − 𝒗₀ 𝜶 𝒗 = 𝒗₀ + 𝒗 𝟐 𝒗² = 𝒗𝟎 𝟐 + 𝟐 × 𝜶(𝒙 − 𝒙₀) 3. MATERIAL 1 carril con carro 1 peso de accionamiento 0.1 N 1 polea guía 1 recogedor 1 soporte para el carril 1 cronometro eléctrico 1 imán de retención 2 placas pequeñas de contacto 2 zócalos 1 aparato morse 1 transportador de regulación para baja tensión Cables de experimentación.
- 17. PESO DE ACCIONAMIENTO CARRIL CON CARRO POLEA GUÍA RECOGEDOR ZÓCALOS SOPORTE PARA EL CARRIL CRONOMETRO ELÉCTRICO IMÁN DE RETENCIÓN PLACAS DE CONTACTO MORSE
- 18. 4. ESQUEMA DE LA EXPERIENCIA Ejercicios: 𝒅 = 𝒗₀ × 𝒕 ± 𝟏 𝟐 × 𝒂 × 𝒕² 𝒂 = 𝟐×𝒕 𝒕² t₁ = 1,06 s 𝒂₁ = 𝟐(𝟎, 𝟓 𝒎) (𝟏, 𝟎𝟔 𝒔)² = 𝟎, 𝟖𝟗 𝒎/𝒔² t₂ = 1,12 s 𝒂₁ = 𝟐(𝟎, 𝟓𝟓 𝒎) (𝟏, 𝟏𝟐 𝒔)² = 𝟎, 𝟖𝟖 𝒎/𝒔² t₃ = 1,17 s 𝒂₁ = 𝟐(𝟎, 𝟔 𝒎) (𝟏, 𝟏𝟕 𝒔)² = 𝟎, 𝟖𝟖 𝒎/𝒔²
- 19. 5. PROCEDIMIENTO Llevar a cabo muy cuidadosamente la compensación del rozamiento como se describe: en los incisos a) al d): a) Colocar el carril en posición horizontal a simple vista b) Mediante un ligero empuje mover el carro en dirección de la flecha y observar si el movimiento es retardado o acelerado. c) En caso de ser necesario aumentar o disminuir la inclinación del carril con los tornillos reguladores y examinar el movimiento del carro como en el inciso b). d) Repetir las operaciones descritas en los incisos b) y c) hasta que I carro después de empujarlo se ponga en movimiento con velocidad constante. La tensión aplicada al imán de retención de L tiene que ser lo más pequeña posible a fin de que no debe producir ningún magnetismo remanente eficaz. Es recomendable determinar los tiempos t y t' por formación de v alores medios a base de varios valores de medida. Colocar la placa de contacto de tal modo que su distancia a los puntos des indicador del carro sea 0.2 m poner en marcha el carro y el cronómetro presionando el manipulador Morse, presionar el manipulador Morse hasta que el carro haya pasado la placa de contacto: leer el tiempo t que necesita el carro para recorrer el trecho 0.2 m Del mismo modo determinar los tiempos t para los tramos de 0.4 m, 0.6 m y 0.8 m.
- 20. Sujetar el recogedor de tal forma que el peso de accionamiento sea captado después del trecho de aceleración x y a consecuencia d esto el carro continúe moviéndose con velocidad constante. Construir una tabla similar a la siguiente: 6. CONCLUSIÓN En cuanto a la experiencia que pudimos tener con este tema es que pudimos usar otro tipo de medidas y otro tipo de formulas para resolver los ejercicios del tema y también ocupamos la misma maquina para controlar el tiempo en que tocaba las placas que una era de inicio y el otro donde paraba el tiempo, pudimos realizarlos los ejercicios de manera fácil porque con una buena explicación no cuesta nada resolverlo y ahora ya podemos resolver la tabla por que tenemos los datos necesarios.