Led matrix-dokumentáció
•
0 gefällt mir•109 views

This is my "Led-matrix" projects documentation in hungarian.

Empfohlen
Empfohlen
Weitere ähnliche Inhalte
Empfohlen
Empfohlen (20)
Led matrix-dokumentáció
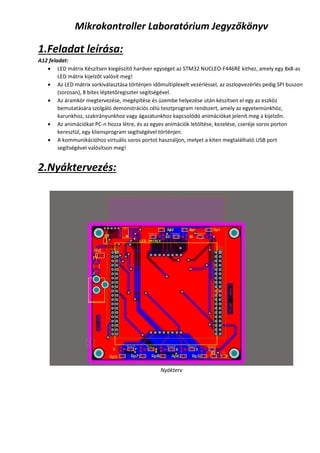
- 1. Mikrokontroller Laboratórium Jegyzőkönyv 1.Feladat leírása: A12 feladat: LED mátrix Készítsen kiegészítő hardver egységet az STM32 NUCLEO-F446RE kithez, amely egy 8x8-as LED mátrix kijelzőt valósít meg! Az LED mátrix sorkiválasztása történjen időmultiplexelt vezérléssel, az oszlopvezérlés pedig SPI buszon (sorosan), 8 bites léptetőregiszter segítségével. Az áramkör megtervezése, megépítése és üzembe helyezése után készítsen el egy az eszköz bemutatására szolgáló demonstrációs célú tesztprogram rendszert, amely az egyetemünkhöz, karunkhoz, szakirányunkhoz vagy ágazatunkhoz kapcsolódó animációkat jelenít meg a kijelzőn. Az animációkat PC-n hozza létre, és az egyes animációk letöltése, kezelése, cseréje soros porton keresztül, egy kliensprogram segítségével történjen. A kommunikációhoz virtuális soros portot használjon, melyet a kiten megtalálható USB port segítségével valósítson meg! 2.Nyáktervezés: Nyákterv
- 2. Led-mátrix és vezérlésének kapcsolási rajza Vezetékek bekötési rendje a Nucleo Kit-be
- 5. 3. Inicializálás CubeMx segítségével: 1. PIN-ek megfelelő inicializálása 2. Órajel megfelelő beállítása
- 6. 3. Interruptok engedélyezése 4.A PROGRAM: 1. az általam írt vagy megváltoztatott .c és .h fájlok
- 7. main.c //időmultiplexelt kirajzoláshoz, forciklussal megyünk végig ezen a tömbön és mindig 1 sort rajzolunk ki uint16_t LED_array[]= { GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3, GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7 }; //iteratív változóim, itt vannak definiálva mert több 3 szintű egymásba ágyazott forcikulusban is ezeket használom uint16_t i; uint16_t j; uint16_t r; uint16_t w; uint8_t temp;//az aktuális sor aktuálisan kirajzolt értéke benne található(rotálás eredménye ide kerül) uint8_t SPI_In=0b00000000; uint8_t SPI_Out; // tesztváltozó uint16_t LED_ALL=GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3| GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7; //Latch enable és Output enable HAL_GPIO_WritePin(GPIOC,GPIO_PIN_9,GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8,GPIO_PIN_RESET); // a nucleo zöld ledjét beállítja HAL_GPIO_WritePin(GPIOA,GPIO_PIN_5,GPIO_PIN_SET); //az összes sort GPIO oldalról kikapcsoljuk/negált logika HAL_GPIO_WritePin(GPIOC,LED_ALL,GPIO_PIN_SET); //a leddriver shiftreget is inaktiváljuk SPI_SendReceive(&SPI_In,&SPI_Out,1); while (1) { if(STRING_DISPLAY_ON) { for(w=0;w<STRING_LENGTH;w++) { init_display(display_aft,mystring[w]); for(r=0;r<8;r++) { shift_aft_to_curr(); for(j=0;j<3;j++) { for(i=0;i<8;i++) { HAL_GPIO_WritePin(GPIOC,LED_array[i],GPIO_PIN_RESET); SPI_SendReceive(&display_curr[i],&SPI_Out,1); HAL_Delay(2); HAL_GPIO_WritePin(GPIOC,LED_array[i],GPIO_PIN_SET); } if(!STRING_DISPLAY_ON) {goto end;} } } } } else { for(r=0;r<128;r++)//itt írom ki az uart adatokat erre külön függvény majd menjen { for(j=0;j<HOLD_TIME;j++)//ez a rotálás miatt kell mert minden r értéket az első forból 3 cilusig kell kitartani . hal_delay nem jó mert folyamatosan kell pörögni a függvénynek { for(i=0;i<8;i++) { if(!TIME_IS_ON) { switch(CURR_ROW_SIZE)//megnézzük a képernyő üzemmódot és a megfelelő / függvényeket meghívva előkésítjük a következő képernyő képet { case 8:temp=leddot[i]; break; case 16:temp=_rotr16(leddot16[i],r); break; case 32:temp=_rotr32(leddot32[i],r); break; case 64:temp=_rotr64(leddot64[i],r); break; } HAL_GPIO_WritePin(GPIOC,LED_array[i],GPIO_PIN_RESET);//for ciklusba vagyunk minden i++ ra a következő sor megfelelő ledjei világítanak de a megfelelő időzítéssel elértem hogy az emberi szemnek folyamatosnak tűnjön a világítás SPI_SendReceive(&temp,&SPI_Out,1);//a megfelelő sor adatai kimennek HAL_Delay(2);//kicsit hagyjuk világítani HAL_GPIO_WritePin(GPIOC,LED_array[i],GPIO_PIN_SET);//majd elsötétítjük } A végtelen ciklusomban 3 féle eset alakulhat: 1. szöveg kíírás 2. óra kirajzolás (1-2 ről bővebben lejjebb) 3. egyéb animáció kirajzolása ennek 4 módja o 8 bit: szeszéles képernyőkép, ekkor nem rotálom a képernyőt a többi esetben viszont igen o 16bit o 32bit:Az aut animáció ezen megy o 64bit
- 8. else { temp=led_hour_array[hour][i]|led_minsec_array[second][i]|led_minsec_array[minute][i]; HAL_GPIO_WritePin(GPIOC,LED_array[i],GPIO_PIN_RESET);//forciklusba vagyunk minden i++ ra a következő sor megfelelő ledjei világítanak de a megfelelő időzítéssel elértem hogy az emberi szemnek folyamatosnak tűnjön a világítás SPI_SendReceive(&temp,&SPI_Out,1);//a megfelelő sor adatai kimennek HAL_Delay(2);//kicsit hagyjuk világítani HAL_GPIO_WritePin(GPIOC,LED_array[i],GPIO_PIN_SET);//majd elsötétítjük } if(STRING_DISPLAY_ON) {goto end;} } } if(second==0) { if(minute==0) { if(hour==0) { hour=12; } hour--; minute=60; } minute--; second=60; } second--; } } end:; /*}*/ } /* USER CODE END 3 */ } TIME Animáció a main.c-ben Itt minden órához, perchez és másodperchez tartozó 8x8 as kép el van tárolva megfelelő 2D-s tömbökben. Az órához tartozók a led_hour_array[][] ahogy a perc/másodpercnek is vamn külön tömbje és ezek a megfelelő pillanatokban egymásra vagyolva vannak. A számolás a ciklus végén történik ez akkor is fut ha nem óra üzemmódban vagyunk. Szövegkiírás a main.c-ben Alapvetően 2 tömb van jelen(display_curr[] és display_aft[]) és ezeket a kapott string alapján töltögetjük. a program indulásakor mind a 2 tömb csupa nulla amikor először belépünk a szövegkiíró üzemmódba a legfelső forciklus elején az a display_aft[] tömböt az első karakternek megfelelően inicializáljuk majd fokozatosan átshiftelem a display_aft[] tartalmát a display_bef[]-be , amikor ez kész újratöltöm a display_aft[]-ot a következő karakter szerint amint a szó végére érek aminek a hosszát a STRING_LENGTH változóban tárolom újrakezdem a műveletet ha új uart parancs érkezik akkor a műveletet goto utasítás segítségével megszakítom
- 9. gpio.c void MX_GPIO_Init(void) { /* GPIO Ports Clock Enable */ __HAL_RCC_GPIOH_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); __HAL_RCC_GPIOC_CLK_ENABLE(); GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pin = GPIO_PIN_5; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_LOW; HAL_GPIO_Init(GPIOA,&GPIO_InitStruct); /*SHF_LE*//*SHF_OE*/ GPIO_InitStruct.Pin =GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3|GPIO_PIN_4| GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7|GPIO_PIN_8|GPIO_PIN_9; HAL_GPIO_Init(GPIOC,&GPIO_InitStruct); GPIO_InitStruct.Pin = GPIO_PIN_13; GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING; GPIO_InitStruct.Pull = GPIO_NOPULL; HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); /* EXTI interrupt init*/ HAL_NVIC_SetPriority(EXTI15_10_IRQn, 0, 0); HAL_NVIC_EnableIRQ(EXTI15_10_IRQn); } /* USER CODE BEGIN 2 */ void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { if((!TIME_IS_ON)&&STRING_DISPLAY_ON) { HAL_GPIO_WritePin(GPIOA,GPIO_PIN_5,GPIO_PIN_RESET);//tesztelés CURR_ROW_SIZE=8; TIME_IS_ON=1; HOLD_TIME=40; STRING_DISPLAY_ON=0; return; } if(TIME_IS_ON&&(!STRING_DISPLAY_ON)) { STRING_DISPLAY_ON=0; TIME_IS_ON=0; CURR_ROW_SIZE=32; HOLD_TIME=3; return; } if((!TIME_IS_ON)&&(!STRING_DISPLAY_ON)) { STRING_DISPLAY_ON=1; TIME_IS_ON=0; return; } } spi.c const uint32_t spi_timeout = 5000; /* USER CODE END 0 */ SPI_HandleTypeDef hspi3; /* SPI3 init function */ void MX_SPI3_Init(void) { hspi3.Instance = SPI3; hspi3.Init.Mode = SPI_MODE_MASTER; hspi3.Init.Direction = SPI_DIRECTION_2LINES; hspi3.Init.DataSize = SPI_DATASIZE_8BIT; hspi3.Init.CLKPolarity = SPI_POLARITY_LOW; hspi3.Init.CLKPhase = SPI_PHASE_1EDGE; hspi3.Init.NSS = SPI_NSS_SOFT; hspi3.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2; hspi3.Init.FirstBit = SPI_FIRSTBIT_MSB; hspi3.Init.TIMode = SPI_TIMODE_DISABLE; hspi3.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE; Itt érdemes megemlíteni hogy a PC13-on lévő pushbutton külső megszakítás hajt végre, a PC-ről lehúzott eszközön ennek segítségévekl tudok az animációk között váltani. A gomb megnyomására a soron következő üzemmód fontos változói beálításra kerülnek, ezek funkcióját deklarációjuknál kifejtem. spi.c ben az spi-hez tartozó az alapvető funkciók lettek megvalósítva. küldés,fogadás,inicializálás,stb.
- 10. hspi3.Init.CRCPolynomial = 10; if (HAL_SPI_Init(&hspi3) != HAL_OK) { Error_Handler(); } } void HAL_SPI_MspInit(SPI_HandleTypeDef* spiHandle) { GPIO_InitTypeDef GPIO_InitStruct; if(spiHandle->Instance==SPI3) { /* USER CODE BEGIN SPI3_MspInit 0 */ /* USER CODE END SPI3_MspInit 0 */ /* Peripheral clock enable */ __HAL_RCC_SPI3_CLK_ENABLE(); /**SPI3 GPIO Configuration PC10 ------> SPI3_SCK PC11 ------> SPI3_MISO PC12 ------> SPI3_MOSI */ GPIO_InitStruct.Pin = GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; GPIO_InitStruct.Alternate = GPIO_AF6_SPI3; HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); /* USER CODE BEGIN SPI3_MspInit 1 */ /* USER CODE END SPI3_MspInit 1 */ } } void HAL_SPI_MspDeInit(SPI_HandleTypeDef* spiHandle) { if(spiHandle->Instance==SPI3) { /* USER CODE BEGIN SPI3_MspDeInit 0 */ /* USER CODE END SPI3_MspDeInit 0 */ /* Peripheral clock disable */ __HAL_RCC_SPI3_CLK_DISABLE(); /**SPI3 GPIO Configuration PC10 ------> SPI3_SCK PC11 ------> SPI3_MISO PC12 ------> SPI3_MOSI */ HAL_GPIO_DeInit(GPIOC, GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12); } /* USER CODE BEGIN SPI3_MspDeInit 1 */ /* USER CODE END SPI3_MspDeInit 1 */ } /* USER CODE BEGIN 1 */ HAL_StatusTypeDef SPI_Send(uint8_t* pData, uint16_t dataSize) { HAL_SPI_Transmit(&hspi3,pData,dataSize,spi_timeout); return HAL_OK; } HAL_StatusTypeDef SPI_Receive(uint8_t* pData, uint16_t dataSize) { HAL_SPI_Receive(&hspi3,pData,dataSize,spi_timeout); return HAL_OK; } /** SPI küldés és fogadás egyszerre. */ HAL_StatusTypeDef SPI_SendReceive(uint8_t* pDataIn, uint8_t *pDataOut, uint16_t dataSize) { HAL_SPI_TransmitReceive(&hspi3,pDataIn,pDataOut,dataSize,spi_timeout); return HAL_OK; } usart.c #include "usart.h" #include "gpio.h" #include "string.h" #include "time.h" #include "font.h"
- 11. /* USER CODE BEGIN 0 */ uint8_t lastReceivedUartCommand = 0; char rxBuffer; uint16_t CURR_ROW_SIZE=32;//alapértelmezetten 32-nek lett most véletlen beállítva de üres regisztert rotál tehát lényegtelen, az első beérkezett uart csomagnál eldől hogy milyen üzemmódban működünk #define TXBUFFERSIZE 255 char txBuffer[TXBUFFERSIZE]; HAL_StatusTypeDef stat; uint8_t mystring[50]={'n'-' ','i'-' ','n'-' ','c'-' ','s'-' ',' '-' ','s'-' ','z'-' ','o'-' ','v'-' ','e'-' ','g'-' ',' '-' '}; //ebbe tárolom a kiírandó szót uint8_t STRING_LENGTH_INIT;//bekérem a sring hosszát uint8_t STRING_LENGTH=13;//string hossza uint8_t STRING_LENGTH_TEMP=0;//ennek segítségével nézem hogy elértem már e a kért szó végét uint8_t STRING_DISPLAY_ON=0;//magának a string kiírásnak az állapotjelzője uint8_t STRING_IS_ON=0;//stringkiírással kapcsolatos adatok uarton való fogadásának állapota uint8_t TIME_IS_ON=1; //az óra üzemmódot jelző változó uint8_t TIME_INIT=0; //ez a változó azt jelzi amikor az óra inicializálás adatai jönnek, amíg ez igaz minden adatot erre hasznosítunk uint8_t HOLD_TIME=50;//meddig tatson egy képernőképet a kimeneten ,,, time nál ugy 1 mp ig kell uint8_t time_type=0; uint8_t digit=1; uint8_t leddot[]=//itt tárolom a bejövő adatot externnel hivatkozok rá a mainből { 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000 }; uint16_t leddot16[]=//itt tárolom a bejövő adatot externnel hivatkozok rá a mainből { 0b0000000000000000, 0b0000000000000000, 0b0000000000000000, 0b0000000000000000, 0b0000000000000000, 0b0000000000000000, 0b0000000000000000, 0b0000000000000000 }; uint32_t leddot32[]=//itt tárolom a bejövő adatot externnel hivatkozok rá a mainből { 0x00ff00ff, 0x38c738c7, 0x7c8344bb, 0x7c8344bb, 0x7c8344bb, 0x38c738c7, 0x00ff00ff, 0x00ff00ff }; uint64_t leddot64[]=//itt tárolom a bejövő adatot externnel hivatkozok rá a mainből { 0b0000000000000000000000000000000000000000000000000000000000000000, 0b0000000000000000000000000000000000000000000000000000000000000000, 0b0000000000000000000000000000000000000000000000000000000000000000, 0b0000000000000000000000000000000000000000000000000000000000000000, 0b0000000000000000000000000000000000000000000000000000000000000000, 0b0000000000000000000000000000000000000000000000000000000000000000, 0b0000000000000000000000000000000000000000000000000000000000000000, 0b0000000000000000000000000000000000000000000000000000000000000000 }; uint8_t display_curr[]= { 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000 }; uint8_t display_aft[]= { 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000, 0b00000000 }; uint16_t Row_counter=0;//maximumértéke a vízszintes szélességet befojásolja alapértelmezetten 8 de ha rotáljuk shiftreget akkor lehet jóval több is uint16_t Col_counter=0;//függöleges szélesség, maximum ugye 8 lehet , persze lehet bonyolítani itt is a dolgot //az ascii karaktert a megfelelő üzemmódokban a megfelelő típussá kell konvertálni ezekre ott van szülségem uint8_t intBuffer8; uint16_t intBuffer16; uint32_t intBuffer32; display_curr[] és display_aft[] inicializálás működésük előbbikben részletezve volt
- 12. uint64_t intBuffer64; uint8_t second=59; uint8_t minute=59; uint8_t hour=11; //void init_display(); //A uart callback függványből ezek a függvények hívódnak meg a megfelelő időpontban void UART_PROCESS_8BITDISPLAY(); void UART_PROCESS_16BITDISPLAY(); void UART_PROCESS_32BITDISPLAY(); void UART_PROCESS_64BITDISPLAY(); void UART_ASCII_SHIFT_CONVERT(); void ROW_COL_STEP(); /* USER CODE END 0 */ UART_HandleTypeDef huart2; /* USART2 init function */ void MX_USART2_UART_Init(void) { huart2.Instance = USART2; huart2.Init.BaudRate = 115200; huart2.Init.WordLength = UART_WORDLENGTH_8B; huart2.Init.StopBits = UART_STOPBITS_1; huart2.Init.Parity = UART_PARITY_NONE; huart2.Init.Mode = UART_MODE_TX_RX; huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart2.Init.OverSampling = UART_OVERSAMPLING_16; if (HAL_UART_Init(&huart2) != HAL_OK) { Error_Handler(); } stat=HAL_UART_Receive_IT(&huart2, (uint8_t*)&rxBuffer, 1); } void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle) { GPIO_InitTypeDef GPIO_InitStruct; if(uartHandle->Instance==USART2) { /* USER CODE BEGIN USART2_MspInit 0 */ /* USER CODE END USART2_MspInit 0 */ /* Peripheral clock enable */ __HAL_RCC_USART2_CLK_ENABLE(); /**USART2 GPIO Configuration PA2 ------> USART2_TX PA3 ------> USART2_RX */ GPIO_InitStruct.Pin = GPIO_PIN_2|GPIO_PIN_3; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Pull = GPIO_PULLUP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; GPIO_InitStruct.Alternate = GPIO_AF7_USART2; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); /* Peripheral interrupt init */ HAL_NVIC_SetPriority(USART2_IRQn, 0, 0); HAL_NVIC_EnableIRQ(USART2_IRQn); /* USER CODE BEGIN USART2_MspInit 1 */ /* USER CODE END USART2_MspInit 1 */ } } void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle) { if(uartHandle->Instance==USART2) { /* USER CODE BEGIN USART2_MspDeInit 0 */ /* USER CODE END USART2_MspDeInit 0 */ /* Peripheral clock disable */ __HAL_RCC_USART2_CLK_DISABLE(); /**USART2 GPIO Configuration PA2 ------> USART2_TX PA3 ------> USART2_RX */ HAL_GPIO_DeInit(GPIOA, GPIO_PIN_2|GPIO_PIN_3); /* Peripheral interrupt Deinit*/ HAL_NVIC_DisableIRQ(USART2_IRQn); } /* USER CODE BEGIN USART2_MspDeInit 1 */ /* USER CODE END USART2_MspDeInit 1 */ } /* USER CODE BEGIN 1 */ /** String küldése, nem blokkolva. */ HAL_StatusTypeDef UART_SendString(char *str) { //IDE INKÁBB VÁRAKOZÓSI SOR KELL while ((huart2.gState != HAL_UART_STATE_BUSY_RX) && (huart2.gState != HAL_UART_STATE_READY)) { } strncpy(txBuffer, str, TXBUFFERSIZE); uint32_t length = strlen(txBuffer); return HAL_UART_Transmit_IT(&huart2, (uint8_t*)txBuffer, length); return HAL_OK; óra,perc,másodperc 0-tól 59-ig megy sikerült fordított sorrendbe bepötyögnöm az összeset úgyhogy azért számlálok visszafele.
- 13. } void HAL_UART_RxCpltCallback(UART_HandleTypeDef *handle) { uint8_t len_temp; if(STRING_IS_ON) { if(STRING_LENGTH_INIT) { len_temp=rxBuffer-'0'; STRING_LENGTH=len_temp+10*STRING_LENGTH; STRING_LENGTH_INIT--; STRING_LENGTH_TEMP=0; } else { mystring[STRING_LENGTH_TEMP]=rxBuffer-'!'+1; STRING_LENGTH_TEMP++; if(STRING_LENGTH_TEMP==STRING_LENGTH) { STRING_IS_ON=0; STRING_DISPLAY_ON=1; } } } else { if(TIME_INIT) { switch(rxBuffer)// üzemmódnak megfelelő uartkezelés hívódik { case 'h': time_type=0; digit=1; break; case 'm': time_type=1; digit=1; break; case 's': time_type=2; digit=1; break; default: switch(time_type) { case 0:hour=rxBuffer; break; case 1:minute=rxBuffer; break; case 2:second=rxBuffer; TIME_INIT=0; break; } } } else { switch(rxBuffer)//az egyik legfontosabb rész , itt döntjük el hogy a bejövőcsomag az üzemmódot akarja állítani vagy pedig a kijelzőt { //kijelzőt csak 0 és 1 gyel állítunk , kliensprogramra erre figyelek ezért van itt a default , ha üzemmód csomag érkezik azt nem tároljuk el a leddot[]tömben hanem csak értelmezzük case'a':CURR_ROW_SIZE=8;//8 bites animáció nincs shift TIME_IS_ON=0; HOLD_TIME=3; STRING_DISPLAY_ON=0; break; case'b':CURR_ROW_SIZE=16;//16 bites animáció TIME_IS_ON=0; HOLD_TIME=3; STRING_DISPLAY_ON=0; break; case'c':CURR_ROW_SIZE=32//32 bites animáció TIME_IS_ON=0; HOLD_TIME=3; STRING_DISPLAY_ON=0; break; case'd':CURR_ROW_SIZE=64;// 64 bites animáció TIME_IS_ON=0; HOLD_TIME=3; STRING_DISPLAY_ON=0; break; case't':CURR_ROW_SIZE=8;//idő animáció TIME_IS_ON=1; TIME_INIT=1; ACTUAL_TIME_INIT=1; HOLD_TIME=40; STRING_DISPLAY_ON=0; break; case's':STRING_IS_ON=1; //szöveg kiírás STRING_LENGTH_INIT=2; STRING_LENGTH=0; TIME_IS_ON=0; break; default: switch(CURR_ROW_SIZE)// üzemmódnak megfelelő uartkezelés hívódik { case 8:UART_PROCESS_8BITDISPLAY(); break; case 16:UART_PROCESS_16BITDISPLAY(); break; case 32:UART_PROCESS_32BITDISPLAY(); break; Itt történik a string valamint annak hosszának a beolvasása. A hossz 2 karakter ennek lekezelése látható az if igaz ágában. Amint beolvastunk mindent a string inicializálás állapotának jelzőbitjét kinullázzuk majd a string kiírás jelzőbitjét igazzá teszem. Óra üzemmódban az aktuális idő beolvasása.Minden időegység 1 karakter hosszú, kliens oldalon itt charrá konvertálok és utána használom csak a .Tostring() függvényt hogy elférjek 1 byte-on. amikor semmilyen inicializálás nem zajlik itt dől el hogy melyik üzemmódba lépünk. érdemes megemlíteni hogy a Holdtime alapvetően 3 hogy megfelelően sebességgel heledjon a tartalom a kijelzőn, óra üzemmódban viszont kb. egy másodpercenként váltson ezért 40.
- 14. case 64:UART_PROCESS_64BITDISPLAY(); break; } break; } } } HAL_UART_Receive_IT(handle, (uint8_t*)&rxBuffer, 1); } void UART_PROCESS_8BITDISPLAY() { uint8_t i; if((Row_counter==0)&&(Col_counter==0))//mindig akkor nullázzuk a képernyőt amikor a következő képernyőkép első bitje megérkezett(értelemszerűen) és azt egyből ki is rajzoljuk { for(i=0;i<8;i++) { leddot[i]=0; } //draw_OK=0; } UART_ASCII_SHIFT_CONVERT();//beérkezett asciiból kivonjuk a '0' karaktert majd a megfelelő típusra konvertáljuk ezelután annyival shifteljük ahanyadik adat a sorban leddot[Col_counter]=leddot[Col_counter]| intBuffer8;//az eddigi adatokhoz hozzávagyolom Row_counter++; ROW_COL_STEP();//a sorok és oszlopok novelésének nullázásának lekezelése } void UART_PROCESS_16BITDISPLAY() { uint8_t i; if((Row_counter==0)&&(Col_counter==0)) { for(i=0;i<8;i++) { leddot16[i]=0; } //draw_OK=0; } UART_ASCII_SHIFT_CONVERT(); leddot16[Col_counter]=leddot16[Col_counter]| intBuffer16;//az eddigi adatokhoz hozzávagyolom Row_counter++; ROW_COL_STEP(); } void UART_PROCESS_32BITDISPLAY() { uint8_t i; if((Row_counter==0)&&(Col_counter==0)) { for(i=0;i<8;i++) { leddot32[i]=0; } //draw_OK=0; } UART_ASCII_SHIFT_CONVERT(); leddot32[Col_counter]=leddot32[Col_counter]| intBuffer32;//az eddigi adatokhoz hozzávagyolom Row_counter++; ROW_COL_STEP(); } void UART_PROCESS_64BITDISPLAY() { uint8_t i; if((Row_counter==0)&&(Col_counter==0)) { for(i=0;i<8;i++) { leddot64[i]=0; } //draw_OK=0; } UART_ASCII_SHIFT_CONVERT(); leddot64[Col_counter]=leddot64[Col_counter]| intBuffer64;//az eddigi adatokhoz hozzávagyolom Row_counter++; ROW_COL_STEP(); } void UART_ASCII_SHIFT_CONVERT() { rxBuffer = rxBuffer - '0';//1 vagy 0 érkezik és char ból int be konvertálom switch(CURR_ROW_SIZE) { case 8:intBuffer8=rxBuffer; intBuffer8=intBuffer8<<Row_counter; break; //annyit shiftelem amelyik sorba tartozik az adat case 16:intBuffer16=rxBuffer; intBuffer16=intBuffer16<<Row_counter; break; case 32:intBuffer32=rxBuffer; intBuffer32=intBuffer32<<Row_counter; egyenként érkeznek be az animáció bitjei ezeket mikor beérkeznek a képernyő egy sorának méretére konvertálom majd annyival shiftelem ahanyadik elemnél tartunk az adott „col” ban és ezt végül hozzávagyolom az eddigi értékhez
- 15. break; case 64:intBuffer64=rxBuffer; intBuffer64=intBuffer64<<Row_counter; break; } } void ROW_COL_STEP() { //azér van itt nyolc mert mindig kiírás után novelem a sort azaz ha a 7. row-t kiírtam akkor növelek 8 ra és ilyenkor 0-zódik minden //a következő kiírés pedig már az új kijelzőkép első pontja lesz if(Row_counter%CURR_ROW_SIZE==0)//ha elértem a sor végét az { //oszlopot növelem a sort nullázom if(Col_counter==7)//ha bejött minden adat akkor 0-zok mindent {//utsó bit nem megy ki ezt még javítani kell Row_counter=0; Col_counter=0; //draw_OK=1; //init_display(); } else { Col_counter++; Row_counter=0; } } } void USART3_IRQHandler(void) { HAL_UART_IRQHandler(&huart2); } void init_display(uint8_t* display,uint8_t letternum) { uint8_t i; uint8_t temp; for(i=0;i<8;i++) { temp=IMAGES[letternum][i]; temp = (temp & 0xF0) >> 4 | (temp & 0x0F) << 4; temp = (temp & 0xCC) >> 2 | (temp & 0x33) << 2; temp = (temp & 0xAA) >> 1 | (temp & 0x55) << 1; display[i]=temp; } } font.h http://xantorohara.github.io/led-matrix-editor/# led_time.h tartalmaza az egyes időpontokhoz tartozó képet Kliensoldal: itt döntöm el hogy új sorba kell e lépni esetleg végeztem a beolvasással
- 16. using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Threading.Tasks; using System.Windows.Forms; using System.IO.Ports; namespace MIKROLAB { public partial class Form1 : Form { private SerialPort MyPort; private char actualstatus; private int CURR_DISPLAY_SIZE; string LETTER_A ="0001100000111100001111000110011001100110111111111111111111000011"; string LETTER_B= "1111110011000110110000111111111011111110110000111100011011111100"; string LETTER_C ="0011111101111111111000001110000011100000111000000111111100111111"; string LETTER_CC = "001111110011111101111111011111111110000011100000111000001110000011100000111000001110000011100 00001111111011111110011111100111111"; string LETTER_AAAA = "000110000001100000011000000110000001100000011000000110000001100000111100001111000011110000111
- 17. 1000011110000111100001111000011110000111100001111000011110000111100001111000011110000111100001 1110001100110011001100110011001100110011001100110011001100110011001100110011001100110011001100 1100110011001100110011001100110011001101111111111111111111111111111111111111111111111111111111 1111111111111111111111111111111111111111111111111111111111111111111111111110000111100001111000 0111100001111000011110000111100001111000011"; string LETTER_CCCC= "000110000001100000011000000110000011110000111100001111000011110000111100001111000011110000111 1000110011001100110011001100110011001100110011001100110011001100110111111111111111111111111111 111111111111111111111111111111111111111000011110000111100001111000011"; string ANIMAT_bme_AUT= "111010001111000000111000111111101001110110000000011110000111111011101010111000001111100110110 0001001100010000001110110011011000011101000111100111001100110110000000000000000011100011001101 100000000000000001111111111111011000000000000000111000000111100110000"; string SMILE = "0000000001100110011001100000000011000011110000111111111101111110"; string TWO_SMILE = "0000000000000000 0110011001100110 0110011001100110 0000000000000000 0100001001000010 0100001001000010 0011110000111100 0000000000000000"; public Form1() { InitializeComponent(); init(); } private void init() { MyPort = new SerialPort(); MyPort.BaudRate = 115200; MyPort.PortName = "COM3"; MyPort.Open(); } private void button1_Click(object sender, EventArgs e) { MyPort.Write("c"); for (int i = 0; i < 256; i++) { MyPort.Write(ANIMAT_bme_AUT[i].ToString()); } } private void button3_Click(object sender, EventArgs e) { MyPort.Write("a"); for (int i = 0; i < 64; i++) { MyPort.Write(SMILE[i].ToString()); } } private void button4_Click(object sender, EventArgs e) { MyPort.Write("d"); for (int i = 0; i < 512; i++) A kiküldendő animációkat stringekben tárolom az 1-5 ös gombok segítségével mennek ki az animációk mindegyik hasonlóan működik , első teendőjük hogy a hosszoknak megfelelő üzemmódparancsot kiadják
- 18. { MyPort.Write(LETTER_AAAA[i].ToString()); } } private void button5_Click(object sender, EventArgs e) { MyPort.Write("b"); for (int i = 0; i < 128; i++) { MyPort.Write(TWO_SMILE[i].ToString()); } } private void button2_Click(object sender, EventArgs e) { MyPort.Write("a"); for (int i = 0; i < 64; i++) { MyPort.Write("0"); } } private void button6_Click_1(object sender, EventArgs e) { int hour = DateTime.Now.Hour; if (hour > 11) { hour = hour - 13; } //hour = 12 - hour; int minute = 60- DateTime.Now.Minute; int second = 60- DateTime.Now.Second; MyPort.Write("t"); MyPort.Write("h"); MyPort.Write(((char)hour).ToString()); MyPort.Write("m"); MyPort.Write(((char)minute).ToString()); MyPort.Write("s"); MyPort.Write(((char)second).ToString()); } private void button7_Click(object sender, EventArgs e) { MyPort.Write("s"); if (textBox1.TextLength < 10) { MyPort.Write("0"); } MyPort.Write(textBox1.TextLength.ToString()); MyPort.Write(textBox1.Text); } } } Óra inicializálás. 24h –s formátumot 12h-ssá kell varázsolni A szöveg valamint annak hosszának elküldése ezzel a függvénnyel „kapcsolom ki” a képernyőt
- 19. ha az eszközre ráadjuk az áramot esz a képernyő fogad a hátulsó nyomógombbal váltogathatjuk az üzemmódokat, amikor még nem dugtuk föl pc-re a default értékeket láthatjuk szöveg kiírásnál a „nincs szöveg” string shiftelődik
- 20. A kliensszoftverrel a következő funkciók érhetőek el. 1. Aut-BME animáció 32x8 –as képernyőn 2. Smile animáció 8x8 as képernyőn nincs shift 3. smile animáció 16x8 as képernyőn van shift
- 21. 4. szöveg kiírása maximum 50 karakterig 5. képernyő lekapcsolása 6. Aktuális idő mutatása