1. Effects of Stiffness Changes on Ankle Kinematics and Muscle Activity
Nicholas Bira, Julieth Ochoa, Cameron Arnett, Prof. Neville Hogan
Massachusetts Institute of Technology, Amgen Scholars Program, Hogan Lab
ABSTRACT
The human ankle is an essential aspect of human locomotion, and understanding the subtle nuances of
how the ankle behaves under different stressors is of interest to researchers studying locomotion. Previous
studies involving both single and multiple degrees of freedom have analyzed the mobility and motility of the
ankle in healthy individuals. This study aims to examine how different ankle stiffnesses affect gait. Individuals
with low mobility in the ankle (high stiffness) stride differently than people with high mobility, or poor
muscular control (low stiffness). We applied varying stiffnesses to healthy individuals during the walking cycle
to examine their responses and muscle activity. The results of these measurements will further define ankle
behavior and how various factors affect locomotion.
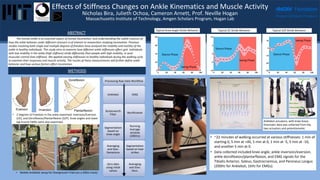
METHODS
Processing Raw Data Workflow
Anklebot
Butterworth
Filter
Segmentation
based on
knee angle
Averaging
and Stan.
Deviations
Zero data
using initial
values
EMG
Rectification
Running
Average
window
(200ms)
Segmentation
based on heel
strikes
Averaging
and Stan.
Devs.
Swing Phase
Swing Phase
Swing Phase
Stance Phase
Stance Phase
Stance Phase
Typical Knee Angle Stride Behavior Typical D/P Stride BehaviorTypical I/E Stride Behavior
• ~22 minutes of walking occurred at various stiffnesses: 1 min of
starting 0, 5 min at +40, 5 min at 0, 1 min at -5, 5 min at -10,
and another 5 min at 0.
• Data collected included knee angle, ankle inversion/eversion,
ankle dorsiflexion/plantarflexion, and EMG signals for the
Tibialis Anterior, Soleus, Gastrocnemius, and Peroneus Longus
(200Hz for Anklebot, 1kHz for EMGs).
• 2 Degrees of Freedom in the ankle examined: Inversion/Eversion
(I/E), and Dorsiflexion/Plantarflexion (D/P). Knee angles and lower
leg muscle EMGs were also examined.
• Mobile Anklebot setup for Overground Trials (on a 200m track)
Eversion Inversion Plantarflexion
Dorsiflexion
Anklebot actuators, with knee brace.
Kinematic data was collected from the
two actuators and potentiometer.
2. Results - Kinematics
• Dependent variable: maximum knee
flexion during swing phase
• +40 produced significantly different results
than neutral or -10; reduced for OG and
increased for TM
• Overall greater flexion in OG than TM
• Dependent variable: Ankle
inversion/eversion maximum knee flexion
during swing phase
• No significant difference between neutral
stiffnesses in OG or TM
• During -10 stiffness, I/E was increased in
both TM and OG
• During +40, I/E was decreased in both TM
and OG
• Dependent variable: Stride Duration
• In both OG and TM walking, +40 elicited
significantly greater stride duration
• In OG, stride duration decreased after
+40 and remained constant regardless
• In TM, stride duration decreased in each
epoch before jumping back up in 0_end
• Dependent variable: Ankle dorsi-/plantar-
flexion at maximum knee flexion during
swing phase
• No significant difference between +40 and
following 0 in OG or TM
• During -10, DP was significantly greater in
OG and lesser in TM
• This trend continued for OG but returned
to normal for TM
• Two-factor ANOVAs over 800
strides
• Knee, DP, and IE angle were
extracted from the moment of
maximum knee flexion during
swing phase
• Stride duration is the elapsed
time between heel strikes
• Independent variables:
• Walking Environment
(TM, OG)
• Stiffness Value (+40,
0_middle, -10, 0_end)
• 0.05 significance level was set
for all statistical tests
• A significant interaction was
observed between walking
environment and stiffness
(p<0.05)
• Post hoc analyses using Tukey’s
HSD test were conducted to
examine marginal means for
stiffness condition
• Overall statistically greater
values for OG when compared
to TM for knee and D/P, and
lesser for I/E and stride
duration.
• -10 stiffness had greatest effect
on all studied aspects.
Inversion
Eversion
Dorsiflexion
Plantarflexion
Treadmill and Overground Mean Stride Behaviors per Epoch
TM
OG
3. Results – Overground EMGs
• Two-factor ANOVAs were conducted
on 420 strides
• Examining the effect of imposed
ankle stiffness on maximum EMG
activation levels during 4 different
segments of the gait cycle in OG
walking: 0-10% (initial contact &
loading response), 40-60% (terminal
stance and pre-swing), 60-80% (initial
and mid swing), and 80-100% (mid
and terminal swing)
• A 0.05 significance level was set for
all statistical tests.
• Independent variables: Stiffness
Value (0_initial, +40, 0_middle, -10,
0_end) and Muscle Type (TA, PL,
SOL, GAS)
• Dependent variable: Maximum EMG
Activation Levels
• Soleus alone displayed significant differences during
the 0-10% epoch
• Increased between stiffness changes, and only for the -
10 and following 0 stiffness
• SOL and GAS statistically increased across all epochs,
except GAS decreased following the -10 epoch
• TA activation levels decreased significantly for all stiff
• No effects in PL
• PL and SOL increased for each of the progressive
epochs (especially SOL)
• TA displayed decreased magnitude as trial proceeded
• No significant effects in GAS
• SOL displayed significant increases for each of the
progressive epochs
• No significant effects in PL, TA, or GAS
TA
SOLSOL
SOL
GAS
SOL
PL
All four muscles examined play
important roles in normal walking
and stabilization of the ankle.
4. Conclusions/Future Work
• Anklebot restricts rotation about the I/E plane with applied stiffnesses, but not in the D/P plane.
• While variations in the I/E plane are apparent for the different stiffnesses, there are also statistically significant differences in D/P
angle as well.
• This suggests coupling between I/E and D/P
• The EMG data from overground suggests that the Soleus is profoundly affected by different stiffnesses, in particular, that proceeding from a
positive stiffness to a negative one generates increased muscle activity that lasts beyond the cause
• The TA seems to be noticeably affected by the negative 10 stiffness during the swing phase of the stride
• The TA is involved in lifting the toes, and this behavior may be the result of the ankle attempting to stabilize and compensate for the
negative stiffness.
• Treadmill and Overground demonstrate markedly different magnitudes in angle magnitude
• This indicates that treadmill and overground may be different in how they induce walking, unlike some previous studies that indicate
the two produce equivalent results
• On treadmill, steps seem to be less pronounced as a possible result of the instability felt while walking
• Overground may encourage longer strides and more pronounced movements as a result of better posture and forward facing
movement
• Distinct effort will be taken to collect further trials from multiple subjects using the processing methods in this presentation
• Muscle EMGs will be calibrated to maximum voluntary contraction from standardized procedures in future trials
• A more thorough examination of the differences between TM and OG, eliminating differences such as walking speed, stride length, etc.