Presentación automatización planta de abrasivos
•Descargar como PPTX, PDF•
0 recomendaciones•411 vistas

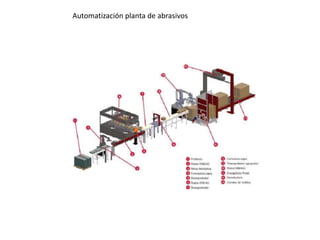
La solución de automatización de una planta de abrasivos sólido como por ejemplo pastillas de freno. La solución adoptada en este caso pasa por la instalación de robots industriales antropomorfos con garras adaptadas, sistema pick&place para llenado de cajas con una formadora y cerradora automática de cajas, final de línea con robot paletizador de cajas con sistema desapilador de palet automático y camino de rodillos motorizados con enfardado automático (anudado y corte de film) y desplazamiento de palet terminado a zona de recogida. El sistema propuesto incluye todo el vallado de protección en el perímetro, así como un armario de comunicaciones con pantalla táctil donde se centralizan todos los procesos.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Presentación automatización planta de abrasivos
Similar a Presentación automatización planta de abrasivos (20)
Último
Último (11)
Presentación automatización planta de abrasivos
- 1. Automatización planta de abrasivos
- 2. En este artículo proponemos la solución de automatización de una planta de abrasivos sólido como por ejemplo pastillas de freno. La solución adoptada en este caso pasa por la instalación de robots industriales antropomorfos con garras adaptadas, sistema pick&place para llenado de cajas con una formadora y cerradora automática de cajas, final de línea con robot paletizador de cajas con sistema desapilador de palet automático y camino de rodillos motorizados con enfardado automático (anudado y corte de film) y desplazamiento de palet terminado a zona de recogida. El sistema propuesto incluye todo el vallado de protección en el perímetro, así como un armario de comunicaciones con pantalla táctil donde se centralizan todos los procesos
- 4. Datos técnicos supuestos: Tipo de palet: ISOPALET (1200 X 1000mm) Mosaico: Según formato caja Altura máxima del palet: 1.500mm Palets/hora: 3-14 (Varía según formato de caja, cadencia de producto) Operarios requeridos en final de línea: 1 Consumo eléctrico aprox: 11 Kw Presión de aire requerida: 6 bares
- 5. Proceso: El robot pick&place IRB140 recogerá las pastillas de freno y las depositará en la caja previamente ensambladas por la formadora de cajas automática. Cuando la caja esté llena pasará a la cerradora automática. Y por último la célula de paletizado totalmente automática se encargará de formar los palets con el mosaico óptimo, envolver el palet de cajas y dejarlo en la zona de recogida listo para su almacenamiento.
- 6. Cinta transportadora Características especificas: Longitud 2000 Mm. Ancho útil del cinta 800 Mm. Paso entre centros de rodillos 80 Mm. Velocidad fija de 10 MT/min. Moto reductor de potencia 0,37 Kw Altura de trabajo 900 ± 25 Mm.
- 7. Características constructivas: La cinta transportadora incluye unas guías para la adecuada posición del producto bajo la mesa hidráulica. Se diseñara una mesa hidráulica para el tipo de bandeja de producto adaptada a las medidas proporcionadas por el cliente. Nuestro departamento de ingeniería ofrecerá un modelo exclusivo y único con las mayores prestaciones y calidades necesarias para una eficiencia máxima.
- 8. Robot Pick&Place IRB140 Un robot de 6 ejes pequeño, potente y rápido Compacto y muy potente. El robot industrial multiusos de 6 ejes IRB 140 soporta una carga de 6 kg con un alcance de 810 mm. Su diseño robusto, con cables completamente integrados, además de su completa flexibilidad y su función de detección de colisiones con completa retracción de la trayectoria, aseguran la fiabilidad y seguridad de este robot. *El modelo de robot puede variar según configuración final del proyecto. Siempre primeras marcas ABB, FANUC, KUKA,…
- 10. Formadora cajas automática. Sistema automático para el formado y cerrado de las solapas inferiores Cabezal precintado inferior para cinta de hasta 50 mm Almacén motorizado con capacidad para aproximadamente 150 cajas Ajuste de ancho, largo y alto de caja Posibilidad de ajustar la velocidad del formado y evacuado de cajas de forma independiente Maniobra eléctrica controlada a través de autómata Avisados acústico luminoso final de cajas y precinto Ejecución derecha o izquierda según mano caja Consumo eléctrico: 1 kW Tensión eléctrica: 220/380V III Presión de aire: 6 Atm. Consumo de aire: 30 lit/caja Altura de trabajo de 520 mín a 750 máx
- 12. Cerradora cajas automática. El ajuste de la máquina al tamaño de la caja es muy sencillo y rápido, basta con ajustar la manivela de altura, la de anchura y las guías de solapa y caja, maniobra completa que se hace de forma rápida. Una vez ajustada al tamaño de la caja a precintar, bastará con pulsar el botón de marcha y la máquina estará lista para recibir cajas con las solapas inferiores cerradas, el producto dentro y las solapas superiores abiertas, aunque si se desea la cerradora precintará el fondo y cerrará las solapas superiores y las precintará, todo esto de forma automática. El cabezal inferior así como el superior son fácilmente removibles, para facilitar el cambio del precinto.
- 14. Características técnicas: Cerrador automático de las 4 solapas superiores Vallado de seguridad con desconexión de máquina Cabezales precintadores para cinta de 50 mm Bandas de arrastre laterales Motorización independiente de las bandas de arrastre Potencia de consumo 0.45 kW Consumo de aire 33l/min Presión de aire 6 Bar Velocidad avance bandas 23 mts/min Tensión eléctrica 230V monofásica Ruedas con freno Rodillos metálicos
- 15. Robot ABB IRB 460 con garra adaptada. Capaz de hasta 2.190 ciclos por hora, el robot de 4 ejes IRB 460 es perfecto para el paletizado al final de la línea. Robot paletizador de alta velocidad El IRB 460 tiene un alcance de 2,4 metros, ocupa un 20% menos de espacio que otros robots de la competencia y trabaja un 15% más rápido que sus rivales más cercanos.
- 16. Características específicas: Capacidad de carga: 110 kg Alcance: 2,40 m Número de ejes: 4 Protección: IP67 Base del robot: 1007 x 720 mm Peso: 925 kg
- 17. Desapilador de palets. Características específicas: Preparado para la ubicación de palets de madera. Capacidad de palets: 15 máximo Dimensiones exteriores aproximadas del módulo: 2.000L x 1.800A x 2.000H. Grupo moto reductor con electro freno de 1.1 KW con desbloqueo manual. Estructura de gran rigidez, construida con columnas de chapa plegada laminada en frío de 50x300x50 electro soldada, con terminales de nivelación regulables ± 25 Mm.
- 19. Características constructivas: Elevación y descenso por medio de motorreductor BONFIGLIOLI Eje superior de 60 mm. mecanizado para soportes de rodamiento de 50 mm. Carro de sustentación de los brazos soporte de los palets con guías de DUROGLISS y doble circuito de cadenas de ¾”. Brazos con uñas articuladas, accionadas por cilindro neumático y bielas. Protección de carenado posterior, construido en chapa de 3 mm. de espesor con apertura para paso del transportador y del palet vacío. 3 Detectores inductivos de parada vertical regulables en altura. 1 Electro válvula de 3/2 con doble bobina de 24 VCC con conectores. 4 Detectores magnéticos, para la detección de posición abierta o cerrada de las palas. 1 Fotocélula detección pila vacía Conjunto filtro regulador para el aire. Tubería de poliuretano con racoraje y accesorios
- 20. Envolvedora automática de brazo giratorio. Producción variable en función de las características de la carga (± 15 palets / hora, incluyendo tiempos de entrada y salida de la carga).
- 21. Características: Dimensiones máximas de palet: 1.000 x 1200mm. Altura Máxima de la carga, incluido el palet 2500mm. Peso Máximo de la carga (estándar): 1.500Kg. Rotación del brazo rotante con aceleración y desaceleración progresiva por variador. Velocidad variable de Subida/Bajada del Carro Portabobinas. Producción de 15 palets/h con 8 – 10vueltas por enfardado. Lectura automática de la altura del palet, mediante fotocélula. Dispositivo para el corte y enganche del film al final del ciclo, mediante movimientos separados y funcionamiento mecánico/neumático. Bobina Ø250mm Y Altura 500mm Consumo aire 50 litros x ciclo. Tensión estándar 230V – 1Ph + N + PE 50/60 Hz. Potencia instalada: 0,75kW (1,00kW Con Carro PRS/PS)
- 22. Tramo de rodillos motorizados. Características especificas: Longitud NOMINAL 1.500 mm. Ancho útil del rodillo 1000 mm. Diámetro del rodillo 89 mm. Paso entre centros de rodillo 150,8 mm. Velocidad fija de 8 m/min. Motorreductores de potencia 0,37 KW. Cubiertos Altura de trabajo 500 ± 25 mm.
- 23. Sistema y control. Todo el sistema está centralizado en un armario controlado por PLC Siemens con pantalla táctil e interfaz de usuario gráfica para que el funcionamiento y control de la máquina resulten intuitivos.