Robotic Hand Design Inspired by Human Anatomy
•
0 likes•344 views

The document describes the design process of a robotic hand project. The robotic hand was designed to mimic the student's own organic left hand. A mold was created from a plaster cast of the student's hand and used to form the basic shape of the robotic hand. A skeletal structure of wires and expansion bolts was constructed within the mold based on the bone structure of a real hand. Silicon was then used to coat the skeletal structure to protect it and add functionality, mimicking tendons. The simple yet biomimetic design allows for future improvements by adding electronic devices.

Recommended
More Related Content
Similar to Robotic Hand Design Inspired by Human Anatomy
Similar to Robotic Hand Design Inspired by Human Anatomy (20)
Recently uploaded
Recently uploaded (20)
Robotic Hand Design Inspired by Human Anatomy
- 1. ErhanKeleş 060080418 Robot Hand Project
- 2. My design of the robotic hand completely comes from my organic hand. I try to mimic the design of the human hand from its fashion to the extent of inner design. In these case, I make use of my hand’s MRI film to design my robotic hand as using biomimetic approaches to the field of robotics.
- 3. For designing fashion of the robotic hand, I use printing mould from plaster so these mould pictures belong to my left hand. Accordingly, the next step is designing of skeletal structure of the robotic hand.
- 4. The scaffolds in the picture that made up of wires and expansion bolts is placed into the mould. Using wires and expansion bolts supports me to make my artificial hand functional(having artificial synovial joints). Size and location of the expansion bolts are designed according to the fashion of the hand bones in my hand so this design makes my robotic hand functional.
- 5. Using wires for skeleton structure of the robotic hand has two major advantages. First one is that thanks to wires’ elastic and bendy properties my artificial hand can perform basic hand functions and secondly wires make my artificial hand adaptable to electronic devices. In addition simple design of the robotic hand provides opportunities to advance the robotic hand as adding electronic devices such as electrical servo motor into the robotic hand.
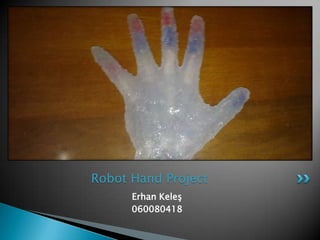
- 6. As a final procedure, I choose silicon to jacket skeletal structure of the robotic hand. Because the silicon is the best material both to make robotic hand functional and to support its skeletal structure as a shock absorber by using silicon.
- 7. After the silicon jacket had hardened in 3 or 4 days, I removed the mould.