1. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
ıtulo 5
Cap´
A s´rie de Fourier cl´ssica e
e a
discreta
O objectivo deste cap´ ıtulo ´ estudar duas das t´cnicas mais uteis para analisar
e e ´
e compreender sinais anal´gicos e digitais, e o modo como estes interactuam
o
com os sistemas lineares invariantes no tempo. Referimo-nos a s´rie de Fou-
` e
rier cl´ssica, para sinais anal´gicos definidos num intervalo finito, e a s´rie
a o ` e
de Fourier discreta, para sinais digitais com um n´mero finito de amostras.
u
Os sinais anal´gicos definidos em toda a recta real e os sinais digitais com
o
um n´mero infinito de amostras exigem outras t´cnicas de an´lise, que ser˜o
u e a a
estudadas posteriormente.
A intui¸ao geom´trica desempenha um importante papel na nossa abor-
c˜ e
dagem as s´ries de Fourier. A utilidade da an´lise de Fourier, e as pr´prias
` e a o
defini¸oes de s´rie de Fourier cl´ssica ou discreta, surgem como consequˆncias
c˜ e a e
directas das defini¸oes de sistema linear invariante no tempo.
c˜
5.1 Motiva¸˜o
ca
A introdu¸ao no estudo dos sistemas lineares invariantes no tempo de t´cnicas
c˜ e
de an´lise do tipo da s´rie e da transforma¸ao de Fourier n˜o ´ obra do acaso,
a e c˜ a e
mas uma consequˆncia natural da pr´pria natureza dos sistemas em causa.
e o
Tentaremos provar que assim ´, usando certos resultados elementares sobre
e
as fun¸oes pr´prias desses sistemas. Antes de passarmos ao estudo desse
c˜ o
assunto, apresentaremos algumas ideias que podem servir de motiva¸ao para
c˜
a an´lise de Fourier.
a
Relembramos certos conceitos conhecidos de algebra linear. Uma matriz
´
M de ordem n × n define uma opera¸ao linear num espa¸o vectorial de
c˜ c
dimens˜o n. O facto da opera¸ao ser linear traduz-se no seguinte: sendo a e
a c˜
89
2. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.1 Motiva¸ao
c˜ 90
b quaisquer dois vectores de n (ou n ), e α e β dois complexos arbitr´rios1 ,
a
¡
tem-se
M (αa + βb) = αM a + βM b.
Pode identificar-se com a matriz M um certo sistema linear, cujos sinais de
entrada e sa´ s˜o vectores de n (ou n ). Para tal n˜o ´ necess´rio grande
ıda a a e a
¡
esfor¸o de abstrac¸ao. Pode considerar-se, por exemplo, que as entradas s˜o
c c˜ a
conjuntos de n valores de tens˜o ou corrente num dado sistema el´ctrico. O
a e
sistema matematicamente representado por M operaria sobre essas n grande-
zas, dando como resposta n outras quantidades cujo significado f´ ısico seria,
possivelmente, semelhante. Alternativamente, em vez de falarmos de um
conjunto de n valores de n grandezas f´
ısicas, podemos falar dos n resultados
v(ti ) (1 ≤ i ≤ n)
de n medidas consecutivas de uma s´ grandeza f´
o ısica v(t).
O c´lculo da sa´ do sistema M traduz-se pela multiplica¸ao de uma
a ıda c˜
matriz por um vector. Designando o resultado por y, tem-se
n
yi = Mij xj , (1 ≤ i ≤ n)
j=1
donde ´ claro que s˜o precisas n2 multiplica¸oes (n para cada um dos yi a
e a c˜
calcular, que s˜o em n´mero n). Ser´ poss´ efectuar tal c´lculo com menos
a u a ıvel a
opera¸oes? Existir´ alguma forma de compreender, em termos qualitativos,
c˜ a
o comportamento do sistema?
Sob certas condi¸oes a resposta a estas quest˜es ´ afirmativa. Para isso,
c˜ o e
´ conveniente recordar os conceitos de vector pr´prio e valor pr´prio de uma
e o o
matriz, e a t´cnica da expans˜o em vectores pr´prios, que ´ usada extensi-
e a o e
vamente em algebra linear. Se a matriz M possuir um conjunto ortonormal
´
de n vectores pr´prios
o
x(1) , x(2) , . . . , x(n)
isto ´, solu¸oes das n equa¸oes
e c˜ c˜
M x(i) = λi x(i) , (1 ≤ i ≤ n)
n
qualquer vector x de pode ser expresso como uma combina¸ao linear do
c˜
tipo
n
x= αi x(i) .
i=1
1
Procuraremos reservar as letras latinas mai´sculas (como M ou H) para nos referirmos
u
a matrizes, as letras min´sculas (como a, b ou x e y) para representar vectores de n ou
u ¢
n
, e as letras gregas para representar escalares reais ou complexos.
£
90
3. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.1 Motiva¸ao
c˜ 91
e1 e1
2 x = 2e1 + e2
v2
v1
1 e2 e2
(a) (b)
e1 e1
y = λ 1 u1 + λ 2 u2
x = u 1 + u2
u2 u1
e2 e2
(c) (d)
Figura 5.1: O papel dos vectores e valores pr´prios de uma matriz 2 × 2.
o
(a) o vector x (b) os vectores pr´prios v1 e v2 da matriz M (c) o vector x
o
expresso como combina¸ao linear de v1 e v2 , x = u1 + u2 = α1 v1 + α2 v2 (d)
c˜
o vector y = M x, calculado a partir do efeito de M sobre u1 e u2 , isto ´,
e
y = λ 1 u1 + λ 2 u2 .
Os escalares λi s˜o os chamados valores pr´prios da matriz.
a o
Neste caso, a resposta do “sistema” representado por M ser´ dada por
a
n
Mx = M αi x(i)
i=1
n
= αi M x(i)
i=1
n
= αi λi x(i) .
i=1
91
4. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.1 Motiva¸ao
c˜ 92
Este processo est´ ilustrado na figura 5.1. O que se pretende ´ calcular
a e
y = M x, em que M ´ a matriz 2 × 2
e
1 229 72
M= ,
250 72 271
e x ´ o vector com elementos x1 = 2 e x2 = 1, isto ´,
e e
2
x=
1
ou, mais concisamente, x = [2 1]T . Pretende calcular-se M x atrav´s da
e
utiliza¸ao dos vectores e valores pr´prios da matriz M .
c˜ o
O vector x est´ representado na figura 5.1.a, com respeito a base orto-
a `
normal constitu´ pelos vectores e1 e e2 ,
ıda
1 0
e1 = e2 = ,
0 1
´
E claro que x = 2e1 + e2 . Analisando a matriz M chega-se a conclus˜o que
` a
os seus vectores pr´prios s˜o
o a
0.6 0.8
v1 = v2 = ,
0.8 −0.6
os quais est˜o representados na figura 5.1.b. Repare-se que v 1 e v2 s˜o orto-
a a
normais.
As componentes do vector x com respeito a base ortonormal constitu´
` ıda
por v1 e v2 est˜o representadas na figura 5.1.c. Isto corresponde a exprimir
a
x como uma combina¸ao linear de v1 e v2 ,
c˜
x = α 1 v1 + α 2 v2 .
As componentes α1 v1 e α2 v2 de x, que s˜o as projec¸oes de x sobre v1 e v2 ,
a c˜
foram designadas por u1 e u2 na figura 5.1.c, tendo-se por isso a express˜o
a
x = u 1 + u2 .
O efeito da matriz M sobre o vector x pode agora interpretar-se facil-
mente, se os valores pr´prios da matriz forem conhecidos. Neste caso, os
o
valores pr´prios s˜o λ1 = 1.3 e λ2 = 0.7. Quer isto dizer que
o a
M v1 = 1.3 v1 ,
M v2 = 0.7 v2 .
92
5. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.2 Preliminares geom´tricos
e 93
Logo, o vector pretendido ´ dado por
e
y = M x = M u1 + M u2 = 1.3u1 + 0.7u2 .
A interpreta¸ao geom´trica ´ dada na figura 5.1.d.
c˜ e e
Se os vectores pr´prios e os valores pr´prios de M forem antecipadamente
o o
conhecidos, a resposta y = M x de M a x pode ser calculada usando esta
express˜o, mas efectuando apenas n adi¸oes e multiplica¸oes. Como s´ ´
a c˜ c˜ o e
necess´rio efectuar o c´lculo dos valores e vectores pr´prios uma vez, se
a a o
quisermos calcular um n´mero suficientemente elevado de respostas
u
M a, M b, M c, M d, . . .
este processo pode diminuir o esfor¸o computacional total, desde que se co-
c
nhe¸am os n coeficientes αi , que ali´s podem substituir com vantagem os n
c a
elementos xi do vector x em tudo o que sejam c´lculos com a matriz M .
a
Se os coeficientes αi n˜o forem j´ conhecidos pode acontecer que esta
a a
t´cnica n˜o seja vantajosa do ponto de vista computacional. Mas, indepen-
e a
dentemente da utilidade que possa ter para fins de c´lculo, o conhecimento
a
dos vectores e valores pr´prios da matriz M ´ de grande importˆncia para a
o e a
compreens˜o da sua ac¸ao sobre vectores arbitr´rios.
a c˜ a
Estes racioc´ınios conduzem a diversas quest˜es de grande importˆncia.
o a
Sabemos que ´ poss´
e ıvel interpretar os sinais digitais como vectores. Es-
tando n´s interessados em sistemas lineares invariantes no tempo, coloca-se
o
a quest˜o de como calcular os seus vectores pr´prios, isto ´, os sinais que estes
a o e
sistemas passam a respectiva sa´ inalterados, a menos de uma constante
ıda
multiplicativa.
Veremos ainda que ´ tamb´m poss´ interpretar os sinais anal´gicos f (t)
e e ıvel o
como vectores, mas de dimens˜o infinita. Isto faz surgir a seguinte pergunta:
a
para qualquer sistema linear e invariante no tempo, anal´gico, designado por
o
H, existir˜o expans˜es para os sinais de entrada f (t) em termos dos “vectores
a o
pr´prios” de H? O que s˜o esses “vectores pr´prios”?
o a o
Antes de mais, conv´m esclarecermos certas quest˜es geom´tricas, essen-
e o e
ciais para estabelecer em bases precisas as analogias entre sinais e vectores.
5.2 Preliminares geom´tricos
e
Nesta sec¸ao definiremos os conceitos de norma, produto interno e ortogona-
c˜
lidade para certas classes de sinais digitais ou anal´gicos de grande interesse
o
pr´tico. Adoptamos uma nota¸ao que ´ praticamente universal: a norma de
a c˜ e
um vector x ´ designada por x , e o produto interno de dois vectores a e b
e
´ designado por a, b .
e
93
6. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.2 Preliminares geom´tricos
e 94
n
5.2.1 Produto interno, norma e ortogonalidade em ¤
e n
¥
n
Relembramos que o produto interno de dois vectores a e b pertencentes a ,
e com componentes
a0 , a1 , a2 , . . . , an−1 ,
e
b0 , b1 , b2 , . . . , bn−1 ,
respectivamente, ´ definido por
e
n−1
a, b = a i bi .
i=0
n
No caso mais geral em que os vectores pertencem a ¡ , a defini¸ao correcta
c˜
´
e
n−1
a, b = a i b∗ .
i
i=0
O produto interno de um vector consigo pr´prio ´ uma grandeza n˜o-negativa
o e a
dada por
n−1
2
a, a = a = |ai |2 ,
i=0
´
e que se pode identificar com o quadrado do comprimento do vector. E
tamb´m habitual a denomina¸ao norma, em vez de comprimento.
e c˜
O produto interno satisfaz as rela¸oes
c˜
a + b, c = a, c + b, c ,
a, b + c = a, b + a, c ,
que se podem verificar partindo da defini¸ao.
c˜
Os vectores podem ser interpretados como sinais digitais, e estes como
vectores. Na verdade, cada elemento ai do vector pode ser visto como uma
amostra do sinal, e cada amostra de um sinal pode ser entendida como uma
das componentes de um vector.
O produto interno de um sinal consigo pr´prio ´ igual ao quadrado da
o e
´
sua norma. E costume interpretar esta grandeza como a energia do sinal.
Note-se que s´ o sinal nulo tem energia nula.
o
Pode definir-se ortogonalidade a custa da defini¸ao de produto interno:
` c˜
dois vectores dizem-se ortogonais se o seu produto interno for nulo.
94
7. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.2 Preliminares geom´tricos
e 95
5.2.2 Produto interno, norma e ortogonalidade em 2 (I)
As defini¸oes anteriores podem generalizar-se a sinais com um n´mero finito
c˜ u
ou infinito de amostras pertencentes a 2 (I) (acerca dos espa¸os p (I) veja-se
c
a sec¸ao 3.6 “Espa¸os vectoriais de sinais”). Seja I um subconjunto finito
c˜ c
ou infinito dos inteiros . Os exemplos mais comuns s˜o I = , ou I =
¦ a ¦
{0, 1, . . . , n − 1}. Este ultimo exemplo conduz-nos de volta aos conceitos
´
mencionados na sec¸ao anterior.
c˜
Define-se produto interno de dois elementos a e b pertencentes a 2 (I)
atrav´s da express˜o
e a
a, b = a i b∗ .
i
i∈I
Tamb´m neste caso se tem
e
a + b, c = a, c + b, c ,
a, b + c = a, b + a, c .
O produto interno de um vector consigo pr´prio ´ uma grandeza n˜o-negativa
o e a
dada por
a, a = a 2 = |ai |2 ,
i∈I
e que se pode identificar com o quadrado do comprimento do vector. E ´
tamb´m habitual a denomina¸ao norma, em vez de comprimento.
e c˜
Tamb´m neste caso ´ poss´ definir ortogonalidade a custa da defini¸ao
e e ıvel ` c˜
de produto interno: dois vectores dizem-se ortogonais se o seu produto in-
terno for nulo.
5.2.3 Produto interno, norma e ortogonalidade em L2 (I)
As defini¸oes anteriores n˜o s˜o aplic´veis a sinais anal´gicos (de vari´vel
c˜ a a a o a
cont´ınua). Para estes, as defini¸oes correctas devem empregar um integral
c˜
em vez de um somat´rio.
o
O produto interno dos sinais a e b (fun¸oes reais ou complexas de vari´vel
c˜ a
real, definidas num certo intervalo I) define-se pela express˜oa
a, b = a(t)b∗ (t) dt,
I
que faz sentido se as energias de a e b no intervalo I forem finitas, isto ´, se
e
2
a, a = a = |a(t)|2 dt < ∞,
I
95
8. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.2 Preliminares geom´tricos
e 96
2
b, b = b = |b(t)|2 dt < ∞,
I
ou seja, se a ∈ L2 (I) e b ∈ L2 (I).
Tal como nos casos anteriores, tem-se
a + b, c = a, c + b, c ,
a, b + c = a, b + a, c .
A defini¸ao de ortogonalidade transp˜e-se para este caso usando, como nos
c˜ o
casos anteriores, o conceito de produto interno: dois sinais anal´gicos de
o
energia finita dizem-se ortogonais se o respectivo produto interno for nulo.
5.2.4 Ortogonalidade, ortonormalidade, e exemplos
Intimamente relacionado com o conceito de produto interno temos o de pro-
jec¸ao. Geometricamente, o produto interno de dois vectores relaciona-se
c˜
com o comprimento ou norma da projec¸ao de um desses vectores sobre o
c˜
outro. Sempre que o produto interno de dois sinais for zero os sinais dizem-se
ortogonais, independentemente de se tratar de sinais anal´gicos ou digitais.
o
No caso de sinais digitais com um n´mero finito de amostras, a interpreta¸ao
u c˜
da ortogonalidade a luz da analogia vectorial ´ simples: os vectores s˜o per-
` e a
pendiculares entre si, pelo que a projec¸ao de um no outro tem comprimento
c˜
nulo.
Um conjunto de sinais ortonormais ´ um conjunto de sinais com norma
e
igual a unidade, e ortogonais dois a dois.
`
O exemplo mais simples de sinais ortonormais, no contexto dos sinais
digitais com n´mero finito n de amostras, ´ o conjunto de n sinais
u e
s(1) , s(2) , s(3) , . . . , s(n) ,
definidos por
s(1) = {1, 0, 0, . . . , 0},
s(2) = {0, 1, 0, . . . , 0},
s(3) = {0, 0, 1, . . . , 0},
.
.
.
(n)
s = {0, 0, 0, . . . , 1}.
´ a
E f´cil verificar a ortonormalidade usando a defini¸ao de produto interno.
c˜
No contexto dos sinais anal´gicos, tamb´m ´ f´cil encontrar conjuntos de
o e e a
sinais ortonormais em intervalos finitos ou mesmo em . Apresentam-se dois
exemplos nas figuras 5.2 e 5.3.
96
9. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.3 As fun¸oes pr´prias dos sistemas anal´gicos lineares invariantes no tempo97
c˜ o o
f0 (x)
1
...
1 x
f1 (x)
f2 (x)
f3 (x)
...
Figura 5.2: Exemplo de um conjunto de fun¸oes ortogonais.
c˜
5.3 As fun¸oes pr´prias dos sistemas anal´gicos
c˜ o o
lineares invariantes no tempo
Um sistema anal´gico linear invariante no tempo ´ matematicamente des-
o e
crito por uma aplica¸ao H que faz corresponder a cada sinal de entrada x
c˜
um sinal de sa´ y. Propomo-nos responder agora a seguinte quest˜o: que
ıda ` a
entradas ´ que conduzem a sa´
e ıdas iguais, a menos de uma constante multi-
plicativa? Estamos a excluir, naturalmente, o sinal nulo, ao qual sabemos
que os sistemas lineares respondem com sa´ nula.
ıda
Esta pergunta ´ semelhante a que conduz ao conceito de vector pr´prio,
e ` o
na teoria de matrizes. Nesse caso, procuram-se vectores particulares sobre
os quais a ac¸ao de uma dada matriz M ´ equivalente a multiplica¸ao por
c˜ e ` c˜
um escalar λ, isto ´, procuram-se vectores x n˜o nulos tais que o vector y
e a
definido por
y = Mx
seja proporcional a x, o que significa que
y = λx,
e conduz a bem conhecida equa¸ao M x = λx.
` c˜
No caso de sistemas lineares invariantes no tempo, procuramos sinais x
n˜o nulos tais que a sa´
a ıda
y = Hx
97
10. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.3 As fun¸oes pr´prias dos sistemas anal´gicos lineares invariantes no tempo98
c˜ o o
φ00 (x) φ10 (x) φ11 (x)
1
1
1 2 1
x x 1 x
2
φ20 (x) φ21 (x) φ22 (x) φ23 (x)
1 1 3
4 2 4 1
x x 1 3 x
2 4
Figura 5.3: Outro exemplo de um conjunto de fun¸oes ortogonais. Notar
c˜
que qualquer das fun¸oes apresentadas ´ ortogonal as restantes, independen-
c˜ e `
temente das respectivas “larguras”.
seja dada por
y = λ x,
onde λ ´ um escalar (real ou complexo). Tais sinais n˜o s˜o formalmente
e a a
alterados pelo sistema, a menos de um ganho e mudan¸a de fase. A equa¸ao
c c˜
em que estamos interessados ´ por isso tamb´m da forma Hx = λx. As suas
e e
solu¸oes dizem-se fun¸oes pr´prias do sistema H.
c˜ c˜ o
As fun¸oes exponenciais
c˜
e(x) = eαx
s˜o as candidatas mais naturais a fun¸oes pr´prias dos sistemas lineares e
a c˜ o
invariantes no tempo.
Consideremos um sistema anal´gico H e um sinal anal´gico x(t) qualquer.
o o
Designemos, tal como anteriormente, por y(t) a resposta de H ao sinal x(t),
98
11. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.3 As fun¸oes pr´prias dos sistemas anal´gicos lineares invariantes no tempo99
c˜ o o
isto ´, y(t) = H[x(t)]. Considere-se o sinal dado por
e
x(t) − x(t − h)
a(t) = .
h
A resposta do sistema H ao sinal a(t) ´ o sinal b(t) dado por
e
b(t) = H[a(t)]
x(t) − x(t − h)
= H
h
H[x(t)] − H[x(t − h)]
=
h
y(t) − y(t − h)
= ,
h
uma vez que H ´ linear e invariante no tempo. Se x for diferenci´vel em t,
e a
temos
x(t) − x(t − h) dx(t)
lim = = x (t).
h→0 h dt
Assumindo que H ´ cont´
e ınuo ou fechado, temos
x(t) − x(t − h) x(t) − x(t − h)
lim H = H lim
h→0 h h→0 h
= H[x (t)]
y(t) − y(t − h)
= lim
h→0 h
= y (t).
Se H for fechado, pode acontecer que o limite
x(t) − x(t − h)
lim H
h→0 h
n˜o exista. Contudo, se existir, ser´ necessariamente igual a H[x (t)]. Se
a a
H n˜o for cont´
a ınuo nem fechado, o limite pode existir mas ser diferente de
H[x (t)], o que invalida os resultados.
Assumindo que H ´ cont´
e ınuo ou fechado, a conclus˜o ´ a seguinte.
a e
Seja y(t) a resposta de um sistema linear invariante no tempo ao
sinal x(t). Ent˜o, a resposta do mesmo sistema linear ao sinal
a
x (t) ser´ y (t).
a
99
12. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.4 As fun¸oes pr´prias dos sistemas digitais lineares invariantes no tempo 100
c˜ o
A resposta a pergunta inicialmente formulada pode agora ser dada. Seja
`
x(t) um sinal de entrada tal que x (t) = α x(t), onde α ´ uma dada constante
e
complexa. Como ´ sabido, a solu¸ao da equa¸ao diferencial
e c˜ c˜
dx(t)
= α x(t)
dt
´ a fun¸ao
e c˜
x(t) = Aeαt , (5.1)
como se pode facilmente verificar por deriva¸ao. A constante A fica deter-
c˜
minada uma vez estabelecidas condi¸oes iniciais (notar que A = x(0)).
c˜
A resposta de qualquer sistema linear invariante no tempo ao sinal expo-
nencial x (t) ser´ por isso
a
H[x (t)] = H[α x(t)] = α H[x(t)] = α y(t).
Mas, pela propriedade acima deduzida, temos
H[x (t)] = y (t).
Confrontando as duas ultimas equa¸oes conclui-se que
´ c˜
dy(t)
= α y(t),
dt
e logo
y(t) = Beαt . (5.2)
A constante arbitr´ria que interv´m nesta equa¸ao foi agora designada por
a e c˜
B, de forma a evitar confus˜o com a constante que aparece na equa¸ao (5.1).
a c˜
Comparando (5.1) e (5.2) chegamos de novo a conclus˜o que a resposta
` a
de um sistema linear invariante no tempo a um sinal exponencial ´ um sinal
e
exponencial semelhante ao primeiro, a menos de um factor constante mul-
tiplicativo (ganho), que poder´ eventualmente ser complexo, e por isso dar
a
origem tamb´m a uma mudan¸a de fase.
e c
Exprimiremos a propriedade de invariˆncia dos sinais exponenciais quando
a
sujeitos a ac¸ao de um sistema linear invariante no tempo dizendo que estes
` c˜
sinais s˜o fun¸oes pr´prias desses sistemas.
a c˜ o
5.4 As fun¸oes pr´prias dos sistemas digitais
c˜ o
lineares invariantes no tempo
Um sistema digital linear invariante no tempo ´ matematicamente descrito
e
por uma aplica¸ao H que faz corresponder a cada sinal digital de entrada
c˜
100
13. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.4 As fun¸oes pr´prias dos sistemas digitais lineares invariantes no tempo 101
c˜ o
x(k) um sinal digital de sa´ y(k). Propomo-nos responder agora a seguinte
ıda `
quest˜o: que classe de sinais de entrada ´ que ´ aplicada em si pr´pria? Ou
a e e o
seja, que tipos de entradas ´ que conduzem a sa´
e ıdas formalmente semelhan-
tes? Estamos a excluir, naturalmente, o sinal nulo, ao qual sabemos que os
sistemas lineares respondem com sa´ nula.
ıda
O primeiro dos argumentos apresentados na sec¸ao anterior ´ v´lido quer
c˜ e a
para exponenciais de vari´vel real x ∈ e sistemas anal´gicos H, quer para
a o
exponenciais de vari´vel discreta x ∈ e sistemas digitais. Existem, natu-
a ¦
ralmente, outros processos de chegar a solu¸ao.
` c˜
Estamos novamente a tentar responder a uma pergunta semelhante a que `
conduz a defini¸ao de vector pr´prio, na teoria de matrizes. No caso dos sis-
` c˜ o
temas que estamos agora a considerar, isto ´, digitais, lineares, e invariantes
e
no tempo, procuramos sinais digitais x(k) n˜o nulos tais que a sa´
a ıda
y(k) = H[x(k)]
seja dada por
y(k) = λ x(k),
onde λ ´ um escalar (real ou complexo). Como anteriormente, tais sinais s´
e o
s˜o alterados pelo sistema no que diz respeito ao ganho e a fase. A equa¸ao
a ` c˜
em que estamos interessados continua a ser da forma Hx = λx.
Para responder a pergunta que fizemos, consideremos um sistema digital
`
H, linear e invariante no tempo, e um sinal x(k) qualquer. Seja y(k) a
resposta do sistema H ao sinal x(k), isto ´, y(k) = H[x(k)].
e
Para sinais de vari´vel cont´
a ınua, diferenci´veis, o sinal definido por
a
x(t) − x(t − h)
a(t) =
h
tende para x (t), quando h → 0. Prov´mos que um sistema de vari´vel
a a
cont´ınua, linear e invariante no tempo, responde a x (t) com y (t), sendo y(t)
a resposta a x(t). Existir´ algum conceito an´logo em termos de sistemas
a a
digitais? Dando a h o menor valor inteiro n˜o-nulo poss´ obtemos o sinal
a ıvel
a(k) = x(k) − x(k − 1),
Por analogia com o caso anterior, investiguemos a natureza da resposta de um
sistema digital linear e invariante no tempo ao sinal a(k), ao qual podemos
chamar a primeira diferen¸a do sinal x(k). A resposta b(k) ´ dada por
c e
b(k) = H[a(k)]
= H [x(k) − x(k − 1)]
= y(k) − y(k − 1),
o que conduz a seguinte conclus˜o.
` a
101
14. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.4 As fun¸oes pr´prias dos sistemas digitais lineares invariantes no tempo 102
c˜ o
Seja y(k) a resposta de um sistema digital linear invariante no
tempo ao sinal x(k). Ent˜o, a resposta do mesmo sistema linear
a
a primeira diferen¸a de x(k) ´ a primeira diferen¸a de y(k).
` c e c
A resposta a pergunta inicialmente formulada pode agora ser dada. Seja x(k)
`
uma entrada particular tal que
x(k) − x(k − 1) = βx(k), (5.3)
onde β ´ uma dada constante complexa. Para obter a solu¸ao desta equa¸ao
e c˜ c˜
basta resolvˆ-la em termos de x(k),
e
x(k − 1)
x(k) = ,
1−β
que conduz imediatamente a
x(0)
x(1) = ,
1−β
x(1) x(0)
x(2) = = ,
1−β (1 − β)2
x(2) x(1) x(0)
x(3) = = 2
= ,
1−β (1 − β) (1 − β)3
e assim sucessivamente. Em geral, temos
x(0)
x(k) = .
(1 − β)k
Pondo α = 1/(1 − β) para simplificar a escrita, obt´m-se
e
x(k) = Aαk , (5.4)
onde a constante A se pode determinar partindo de condi¸oes iniciais (notar
c˜
que A = x(0)). Isto significa que a solu¸ao de (5.3) ´ uma fun¸ao exponencial,
c˜ e c˜
de vari´vel discreta. Notar que a substitui¸ao α = eγ conduz a
a c˜
x(k) = Aeγk .
A resposta de qualquer sistema linear invariante no tempo ao sinal a(k) ser´
a
por isso
y(k) = Bαk = Beγk , (5.5)
como se pode ver por um processo inteiramente semelhante ao que seguimos
para sinais anal´gicos.
o
102
15. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.5 Escolha de exponenciais para expans˜es
o 103
Confirmamos assim que, a semelhan¸a do que se passava para os sinais
` c
anal´gicos, a resposta de um sistema linear invariante no tempo a um si-
o
nal exponencial ´ um sinal exponencial semelhante ao primeiro, a menos de
e
um factor constante multiplicativo (ganho), que poder´ eventualmente ser
a
complexo, e por isso dar origem tamb´m a uma mudan¸a de fase.
e c
Exprimiremos a propriedade de invariˆncia dos sinais exponenciais de
a
vari´vel discreta quando sujeitos a ac¸ao de um sistema linear invariante no
a ` c˜
tempo dizendo que eles s˜o fun¸oes pr´prias desses sistemas.
a c˜ o
5.5 Escolha de exponenciais para expans˜es
o
Nesta sec¸ao definiremos um conjunto de sinais anal´gicos e um outro con-
c˜ o
junto de sinais digitais de grande importˆncia. Defendemos que estes conjun-
a
tos de sinais s˜o especialmente apropriados para a expans˜o de sinais tendo
a a
´
em vista a an´lise de sistemas lineares invariantes no tempo. E com base
a
nestes conjuntos de sinais que se definem duas das pe¸as fundamentais para
c
a an´lise dos sistemas e sinais anal´gicos e digitais: a s´rie e a transforma¸ao
a o e c˜
de Fourier cl´ssicas, e a s´rie de Fourier discreta.
a e
Iniciemos ent˜o o processo de busca desses conjuntos de sinais. O facto de
a
sabermos que as fun¸oes pr´prias dos sistemas lineares invariantes no tempo
c˜ o
s˜o exponenciais sugere a procura de processos de exprimir sinais anal´gicos
a o
em termos de exponenciais
ei (t) = Ai esi t ,
ou de sinais digitais em termos de exponenciais
ei (k) = Ai esi k ,
onde Ai e si designam constantes complexas a determinar, e que podem ser
diferentes num caso e noutro (apesar disso usamos as mesmas letras para n˜o a
complicar a nota¸ao).
c˜
Pretendemos poder exprimir qualquer sinal f de interesse como com-
bina¸ao linear dos sinais ei . Para sinais anal´gicos a expans˜o ser´ por isso
c˜ o a a
da forma
f (t) = αi ei (t) = α i Ai e s i t ,
i i
enquanto que, para sinais digitais, teremos
f (k) = αi ei (k) = α i Ai e s i k .
i i
103
16. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.5 Escolha de exponenciais para expans˜es
o 104
Voltamos a insistir que as constantes complexas Ai e si poder˜o ser distintas
a
num caso e noutro.
Em qualquer dos casos o c´lculo dos coeficientes αi dever´ ser f´cil de
a a a
efectuar, ou a utilidade pr´tica da expans˜o ficaria seriamente comprometida.
a a
A resposta de um sistema H, linear e invariante no tempo, a um sinal f
poder-se-ia ent˜o determinar atrav´s da express˜o
a e a
Hf = H αi e i
i
= αi H[ei ]
i
= α i λi e i ,
i
onde os λi traduzem o efeito do sistema H sobre a exponencial ei , e n˜o a
dependem de f . Note-se como o racioc´ ınio ´ v´lido para os casos anal´gico
e a o
e digital, e como depende do facto dos sinais exponenciais serem fun¸oes c˜
pr´prias de H.
o
Como veremos em seguida, os conjuntos de exponenciais mais adequados
para que o c´lculo dos coeficientes αi seja de facto simples s˜o os conjuntos de
a a
exponenciais ortonormais. Explicitaremos os necess´rios processos computa-
a
cionais, e veremos qual o papel que o conceito de “projec¸ao” desempenha
c˜
nesses processos.
Sublinhamos que muitos dos resultados que se seguem s˜o v´lidos para
a a
outros conjuntos de sinais ortonormais al´m dos sinais exponenciais. O nosso
e
interesse nas exponenciais resulta somente do facto de serem estas as fun¸oes
c˜
pr´prias dos sistemas lineares invariantes no tempo, em cujo estudo estamos
o
particularmente interessados.
5.5.1 Uso da ortonormalidade
Consideremos de novo as expans˜es de vectores segundo uma base ortonor-
o
mal, tal como se estudam na algebra linear. Sejam
´
e0 , e1 , . . . , en−1 (5.6)
n vectores ortonormais (isto ´, com norma ou comprimento igual a unidade,
e `
e ortogonais dois a dois).
A importˆncia da ortonormalidade reside no facto de permitir calcular fa-
a
cilmente os coeficientes da expans˜o de qualquer vector que se possa exprimir
a
como combina¸ao linear de elementos da base. Lembremos como.
c˜
104
17. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.5 Escolha de exponenciais para expans˜es
o 105
Seja x um vector qualquer, e procuremos n coeficientes αi tais que
n−1
x= αi e i . (5.7)
i=0
Recordamos que x e os n elementos ei s˜o vectores, enquanto que os αi s˜o
a a
escalares (reais ou complexos).
Qual ser´ a projec¸ao de x sobre um determinado vector da base, por
a c˜
exemplo, e0 ? A projec¸ao de x sobre e0 ´ obviamente um vector da forma βe0 ,
c˜ e
uma vez que tem a direc¸ao de e0 , mas, eventualmente, comprimento dife-
c˜
rente. Como os ei s˜o perpendiculares dois a dois, os vectores e1 , e2 , . . . , en−1
a
s˜o perpendiculares a e0 . Logo, na expans˜o (5.7), o unico termo com o qual
a a ´
se pode identificar a projec¸ao de x sobre e0 ´ o termo
c˜ e
α0 e 0 .
Mas ent˜o α0 dever´ ser o comprimento do vector “projec¸ao de x sobre
a a c˜
e0 ”. Mais precisamente, tomando o produto interno de x com e0 , e usando a
ortogonalidade dos ei ,
n−1
x, e0 = αi e i , e 0 = α 0 e 0 , e 0 ,
i=0
2
Como os ei s˜o ortornormais, a norma de e0 ´ unit´ria, e0
a e a = e0 , e0 = 1,
pelo que
α0 = x, e0 .
O racioc´
ınio ´ o mesmo para outro qualquer dos vectores ei , e o resultado ´
e e
a seguinte conclus˜o.
a
O i-´simo coeficiente da expans˜o de x em termos dum conjunto
e a
de vectores ortonormais obt´m-se projectando x sobre o i-´simo
e e
elemento desse conjunto.
´
E este o resultado que pretend´
ıamos. Apesar de, durante o percurso efectu-
ado, n˜o termos sido sempre matematicamente rigorosos, cheg´mos a uma
a a
conclus˜o v´lida e que nos pode orientar na busca de solu¸oes para o pro-
a a c˜
blema da expans˜o de sinais anal´gicos ou digitais em termos de um conjunto
a o
de sinais ei .
105
18. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.5 Escolha de exponenciais para expans˜es
o 106
5.5.2 O caso digital
A expans˜o ´ definida por
a e
n−1
f (k) = αi ei (k),
i=0
onde os ei (k) s˜o sinais digitais exponenciais definidos por
a
ei (k) = Ai esi k .
Estamos interessados em expandir sinais com um n´mero finito de amostras,
u
que podemos numerar de 0 a N − 1, por exemplo.
O problema que se levanta agora ´ determinar as constantes Ai e si que
e
definem cada uma das exponenciais, por forma a que o conjunto resultante
seja ortonormal. Importa ainda resolver o problema do c´lculo das projec¸oes
a c˜
do sinal f (k) sobre cada um dos ei (k). Este ultimo problema ´ importante
´ e
porque as projec¸oes s˜o, como j´ vimos, os coeficientes αi . Finalmente,
c˜ a a
interessa ainda determinar o n´mero de exponenciais distintas necess´rias a
u a `
expans˜o de qualquer sinal f (k). Abordaremos estes problemas em seguida.
a
A expans˜o e os coeficientes
a
No caso digital, a expans˜o de um sinal f (k) definido para 0 ≤ k < N fica
a
assegurada por
f (k) = αi ei (k) = α i Ai e s i k .
i i
Utilizando os conceitos geom´tricos anteriormente expostos, e admitindo que
e
os ei (k) s˜o ortonormais, o valor das constantes αi fica determinado pelas
a
projec¸oes do sinal f (k) sobre cada uma das exponenciais e i (k), ou seja,
c˜
N −1
αi = f (k)e∗ (k).
i
k=0
Notem-se os limites do somat´rio, compat´
o ıveis com a conven¸ao que escolhe-
c˜
mos para a numera¸ao das amostras.
c˜
As constantes Ai e si
Seja N um inteiro fixo, positivo, e consideremos os dois sinais exponenciais
a e b definidos por
a(k) = Aeαk ,
106
19. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.5 Escolha de exponenciais para expans˜es
o 107
b(k) = Beβk .
Sabemos que o produto interno destes dois sinais ´ dado por
e
N −1
a, b = a(k) b(k)∗ ,
k=0
e pretendemos determinar A e B, bem como α e β, de forma a que os sinais
e ´
sejam ortogonais, isto ´, de forma que se tenha a, b = 0. E imposs´ ıvel
obter a ortogonalidade se α e β forem reais, uma vez que as exponenciais de
expoente real tˆm sempre valores positivos. Por isso iremos assumir desde j´
e a
que α e β s˜o complexos. A hip´tese mais simples corresponde a tomar
a o
a(k) = Aejαk ,
b(k) = Bejβk ,
isto ´, exponenciais complexas cujo argumento ´ um imagin´rio puro.
e e a
Para que a e b possam vir a integrar um conjunto ortonormal de sinais
interessa ainda que a = b = 1. Esta condi¸ao ´ f´cil de satisfazer, uma
c˜ e a
vez que
N −1
a 2
= a, a = Aejαk A∗ e−jαk ,
k=0
ou seja,
N −1
2
a = |A|2 = N |A|2 .
k=0
√
Vemos que basta tomar A = 1/ N para que a = 1. Naturalmente, to-
√
mando B = A = 1/ N conduz a b = 1, o que resolve esta primeira
quest˜o.
a
Calculando agora a, b , tentemos determinar a condi¸ao que α e β devem
c˜
satisfazer para que a ortogonalidade se verifique:
N −1
a, b = Aejαk B ∗ e−jβk
k=0
N −1
1
= ej(α−β)k
N k=0
N −1
1
= rk ,
N k=0
107
20. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.5 Escolha de exponenciais para expans˜es
o 108
onde para simplificar a escrita se pˆs r = ej(α−β) . Se α = β, vem a, b = 1.
o
Mas quando α = β tem-se a = b e a, b = a 2 = b √, pelo que n˜o se chega
2
a
a nada de novo (j´ vimos anteriormente que A = 1/ N conduz a a = 1).
a
Quando α = β tem-se r = 1, e o produto interno de a(k) e b(k) pode
calcular-se aplicando a express˜o para a soma de uma progress˜o geom´trica.
a a e
Isto conduz a
1 1 − rN
a, b = ,
N 1−r
uma express˜o que se anula se
a
rN = ej(α−β)N = 1.
Isto significa que α − β deve ser um m´ltiplo de 2π/N . Se definirmos um
u
conjunto de N sinais ei (0 ≤ i < N ) atrav´s de
e
1 2π
ei (k) = √ ej N ik ,
N
obtemos uma base ortonormal, uma vez que
N −1 N −1
1 2π 1 2π 1, se µ = ν,
eµ (i)e∗ (i) =
ν √ ej N µi √ e−j N νi =
i=0 i=0
N N 0, se µ = ν.
O n´ mero de sinais exponenciais necess´rios
u a
Cada ei ´ um vector num espa¸o de dimens˜o N , e um espa¸o de dimens˜o N
e c a c a
cont´m exactamente N vectores ortogonais. Logo, o n´mero de exponenciais
e u
necess´rias para a expans˜o de qualquer sinal com N amostras ´, no m´ximo,
a a e a
N.
As exponenciais digitais ei (k) s˜o peri´dicas em k, com per´
a o ıodo N , isto
´,
e
ei (k + N ) = ei (k).
Assim, por exemplo,
ei (−1) = ei (N − 1),
ei (N ) = ei (0),
ei (N + 1) = ei (1).
Note-se que, apesar de n˜o existir nada que nos impe¸a de considerar
a c
e0 (k), e1 (k), e2 (k), . . . , ei (k), . . .
108
21. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.5 Escolha de exponenciais para expans˜es
o 109
para qualquer i ∈ , n˜o h´ nisso qualquer vantagem uma vez que
¦ a a
e−1 (k) = eN −1 (k),
e0 (k) = eN (k),
e1 (k) = eN +1 (k),
para dar apenas trˆs exemplos. Por outras palavras, as exponenciais e i (k)
e
apresentam periodicidade tanto em i, tal como em k, com per´ ıodo N . Note-se
que
1 2π
ei (k) = √ ej N ik = ek (i),
N
ou seja, ei (k) depende de i da mesma forma que depende de k.
O n´mero de sinais exponenciais digitais ei (k) distintos
u
1 2π
ei (k) = √ ej N ik
N
que se obt´m quando i toma valores inteiros quaisquer, positivos ou negativos,
e
´ exactamente N .
e
5.5.3 O caso anal´gico
o
Estamos interessados na expans˜o
a
f (t) = αi ei (t),
i
onde
ei (t) = Ai esi t .
Temos de assegurar a ortonormalidade dos sinais ei (t) escolhendo adequada-
mente as constantes Ai e si . Conseguido isto, o c´lculo dos coeficientes αi
a
poder´ ser conseguido a custa do c´lculo das projec¸oes do sinal f (t) sobre
a ` a c˜
cada um dos ei (t). Interessa ainda determinar o n´mero de exponenciais
u
necess´rias a expans˜o de f (t). Abordaremos estes problemas em seguida.
a ` a
A expans˜o e os coeficientes
a
Utilizando os conceitos geom´tricos anteriormente expostos, e admitindo que
e
as fun¸oes ei (t) s˜o ortonormais num dado intervalo I, o valor dos coefici-
c˜ a
entes αi fica determinado pelas projec¸oes do sinal f (t) sobre cada uma das
c˜
exponenciais ei (t), ou seja,
αi = f (t)e∗ (t) dt.
i
I
109
22. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.5 Escolha de exponenciais para expans˜es
o 110
Como confirma¸ao podem calcular-se os coeficientes αi partindo da expans˜o
c˜ a
f (t) = αi ei (t),
i
multiplicando ambos os membros da igualdade por e∗ (t), e integrando sobre
k
I, de forma a poder utilizar a condi¸ao de ortonormalidade. Esta ideia conduz
c˜
a
f (t)e∗ (t) dt =
k αi ei (t) e∗ (t) dt
k
I I i
= αi ei (t)e∗ (t) dt
k
i I
= αk .
Isto n˜o ´ mais do que formar o produto interno de f (t) com uma das fun¸oes
a e c˜
ei (t), tal como fizemos atr´s. Chega-se assim as equa¸oes
a ` c˜
f (t) = αi ei (t), (5.8)
i
αi = f (t)e∗ (t) dt,
i (5.9)
I
que evidenciam a forma como se pode proceder a expans˜o de f (t) e ao
` a
c´lculo dos coeficientes αi .
a
Note-se que as express˜es (5.8) e (5.9) s˜o v´lidas independentemente
o a a
da natureza particular das fun¸oes ei (t), uma vez que para as obter us´mos
c˜ a
apenas a propriedade da ortonormalidade.
As constantes Ai e ci
Consideremos agora dois sinais exponenciais a e b definidos por
a(t) = Aeαt ,
b(t) = Beβt .
Consideremos que t pode variar num intervalo finito I conhecido, de compri-
mento T . O produto interno dos sinais a e b ´ dado por
e
a, b = a(t)b(t)∗ dt,
I
110
23. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.5 Escolha de exponenciais para expans˜es
o 111
e o nosso objectivo ´ determinar A e B, bem como α e β, de forma a que os
e
sinais sejam ortogonais, isto ´, de forma que se tenha a, b = 0. Tal como no
e
caso digital, tamb´m neste caso ´ imposs´ obter a ortogonalidade se α e β
e e ıvel
forem reais, uma vez que as exponenciais de expoente real tˆm sempre valor
e
positivo. Por isso iremos assumir desde j´, tal como anteriormente, que α e
a
β s˜o complexos. Tamb´m neste caso a hip´tese mais simples corresponde a
a e o
tomar
a(t) = Aejαt ,
b(t) = Bejβt ,
isto ´, exponenciais complexas cujo argumento ´ um imagin´rio puro.
e e a
Para que a e b possam vir a integrar um conjunto ortonormal de sinais
interessa ainda que a = b = 1. Esta condi¸ao ´ f´cil de satisfazer, uma
c˜ e a
vez que
a 2
= a, a = Aejαt A∗ e−jαt dt
I
ou seja,
a 2 = |A|2 dt = T |A|2 .
I
√
Logo, basta √tomar A = 1/ T para que a = 1. Naturalmente, tomando
B = A = 1/ T conduz a b = 1, o que resolve esta primeira quest˜o. a
Calculando agora a, b , tentemos determinar a condi¸ao que α e β devem
c˜
satisfazer para que a ortogonalidade em I = [r, r + T ] se verifique:
a, b = Aejαt B ∗ e−jβt dt
I
1
= ej(α−β)t
T I
t=r+T
1 ej(α−β)t
=
T j(α − β) t=r
1
= ej(α−β)r ej(α−β)T − 1 .
j(α − β)T
2
O caso α = β foi j´ discutido. Corresponde a ter a = b e a, b = a
a = b 2.
Quando α = β, a express˜o para a, b anula-se se
a
ej(α−β)T = 1,
ou seja, se α − β for um m´ltiplo de 2π/T . Se definirmos um conjunto de
u
sinais ei (t) (i ∈ ) atrav´s de
¦ e
1 2π
ei (t) = √ ej T it ,
T
111
24. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.5 Escolha de exponenciais para expans˜es
o 112
obtemos um conjunto fun¸oes ortonormais, tendo-se
c˜
∗ 1 2π 1 2π 1, se µ = ν,
eµ (t)eν (t) dt = √ ej T µt √ e−j T νt =
I I T T 0, se µ = ν.
´
E instrutivo comparar esta rela¸ao com a que se tem para o caso de expo-
c˜
nenciais de vari´vel discreta
a
1 2π
eµ (i) = √ ej N µi .
N
O resultado em causa ´
e
N −1 N −1
1 2π 1 2π 1, se µ = ν,
eµ (i)e∗ (i)
ν = √ ej N µi √ e−j N νi =
i=0 i=0
N N 0, se µ = ν,
cuja semelhan¸a com o caso que agora discutimos ´ clara, sobretudo se se
c e
tomar I = [0, T ]:
T T
1 2π 1 2π 1, se µ = ν,
eµ (t)e∗ (t) dt =
ν √ ej T µt √ e−j T νt =
0 0 T T 0, se µ = ν.
O n´ mero de sinais exponenciais necess´rios
u a
Neste caso, como o espa¸o dos sinais de energia finita num intervalo I,
c
L2 (I), tem obviamente dimens˜o infinita, o n´mero de sinais exponenciais
a u
necess´rios para proceder a expans˜o de um qualquer desses sinais ´, em
a ` a e
geral, infinito.
Existem diferen¸as importantes entre os dois conjuntos ortonormais de
c
sinais exponenciais mencionados, ou sejam
1 2π
ek (t) = √ ej T kt ,
T
1 j 2π ki
ek (i) = √ e N .
N
Para expandir qualquer sinal definido num intervalo I de medida T s´ ´ o e
preciso conhecer o valor dos sinais ek (t) para t ∈ I. Mas como estes s˜o a
de facto peri´dicos com per´
o ıodo T , podemos consider´-los definidos para
a
qualquer real t, a custa desta periodicidade. Note-se tamb´m que o n´mero
` e u
de sinais ek (t) distintos ´ claramente infinito. Qualquer dos
e
e0 (t), e1 (t), e2 (t), . . . , ei (t), . . .
112
25. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.6 Resumo: a s´rie de Fourier discreta
e 113
´ diferente dos restantes. Em particular, e0 (t) ´ constante, e1 (t) ´ peri´dico
e e e o
com per´ ıodo T , e2 (t) com per´
ıodo T /2, e, em geral, ek (t) tem per´ıodo T /k.
Esta situa¸ao contrasta com a que ocorre no caso digital, em que o n´mero
c˜ u
de exponenciais ortornormais distintas ´ finito e igual a N .
e
5.6 Resumo: a s´rie de Fourier discreta
e
As equa¸oes
c˜
N −1
1 2π
f (k) = √ αi ej N ik , (5.10)
N i=0
N −1
1 2π
αi = √ f (k)e−j N ki , (5.11)
N k=0
definem a expans˜o do sinal f (k) em s´rie de Fourier discreta.
a e
S´ ´ necess´rio conhecer o sinal f (k) para 0 ≤ k < N para proceder a
oe a `
sua expans˜o. Contudo, a soma
a
N −1
1 2π
√ αi ej N ik
N i=0
est´ definida para qualquer k inteiro, e ´ peri´dica em k, com per´
a e o ıodo N .
Logo, s´ temos
o
N −1
1 2π
f (k) = √ αi ej N ik
N i=0
para qualquer inteiro k se f (k) for a partida uma fun¸ao peri´dica com
` c˜ o
per´ıodo N .
Os sinais exponenciais s˜o fun¸oes pr´prias dos sistemas digitais linea-
a c˜ o
res invariantes no tempo. A express˜o (5.10) permite representar um sinal
a
definido para 0 ≤ k < N como combina¸ao linear de exponenciais, e como
c˜
tal facilita o c´lculo das respostas de sistemas lineares invariantes no tempo.
a
Tomemos, como anteriormente, um sinal f (k) para entrada de um sistema H
linear e invariante no tempo. Exprimindo f (k) atrav´s de (5.10), e usando
e
a linearidade do sistema H, chega-se as seguintes equa¸oes para a resposta
` c˜
g(k) = H[f (k)]:
g(k) = H[f (k)]
= H αi ei (k)
i
= αi H[ei (k)].
i
113
26. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.7 Resumo: a s´rie de Fourier cl´ssica
e a 114
Como as exponenciais s˜o fun¸oes pr´prias de H, a resposta ao sinal
a c˜ o
2π
ei (k) = ej N ik
´ um sinal da forma λi ei (k), onde λi designa uma constante complexa apro-
e
priada que depende da natureza do sistema H. Isto permite escrever
g(k) = H[f (k)] = λi αi ei (k),
i
e significa que a resposta do sistema H ao sinal f (k), com coeficientes de s´rie
e
de Fourier discreta αi , se obt´m multiplicando cada αi por uma constante λi .
e
Cada uma destas constantes, que se podem determinar experimentalmente,
traduz o efeito do sistema sobre um dos sinais exponenciais peri´dicos e i (k).
o
5.7 Resumo: a s´rie de Fourier cl´ssica
e a
Os resultados anteriores conduziram-nos as equa¸oes
` c˜
+∞
1 2π
f (t) = √ αi ej T it , (5.12)
T i=−∞
T
1 2π
αi = √ f (t)e−j T it dt, (5.13)
T 0
que definem a expans˜o de uma fun¸ao f (t) em s´rie de Fourier no intervalo
a c˜ e
[0, T ].
S´ ´ necess´rio conhecer a fun¸ao f (t) no intervalo [0, T ] para proceder a
oe a c˜ `
sua expans˜o. Contudo, a soma da s´rie
a e
2π
s(t) = αi ej T it ,
i
que est´ definida para qualquer t real, ´ peri´dica com per´
a e o ıodo T . Logo, s´
o
se pode ter
2π
f (t) = αi ej T it
i
para qualquer t real se f (t) for a partida uma fun¸ao peri´dica com per´
` c˜ o ıodo
T.
Os sinais exponenciais s˜o fun¸oes pr´prias dos sistemas lineares invarian-
a c˜ o
tes no tempo, isto ´, a resposta de um desses sistemas a um sinal exponencial
e
´ ainda um sinal exponencial. A express˜o (5.12) permite representar um si-
e a
nal definido no intervalo [0, T ] como combina¸ao linear de exponenciais, e
c˜
114
27. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.8 Exemplos 115
como tal facilita o c´lculo das respostas de sistemas lineares invariantes no
a
tempo. Mais precisamente, seja f (t) um sinal aplicado a entrada de um sis-
`
tema H linear e invariante no tempo. Exprimindo f (t) atrav´s de (5.12), e
e
usando a linearidade do sistema H, chega-se as seguintes equa¸oes para a
` c˜
resposta g(t) = H[f (t)]:
g(t) = H[f (t)]
= H αi ei (t)
i
= αi H[ei (t)].
i
Como as exponenciais s˜o fun¸oes pr´prias de H, a resposta ao sinal
a c˜ o
2π
it
ei (t) = ej T
´ um sinal da forma λi ei (t), onde λi designa uma constante complexa apro-
e
priada que depende da natureza do sistema H. Isto permite ent˜o escrever
a
g(t) = H[f (t)] = λi αi ei (t),
i
e significa que a resposta do sistema H a um sinal f (t) com coeficientes de
s´rie de Fourier αi se obt´m multiplicando cada αi por uma constante λi .
e e
Cada uma destas constantes, que se pode determinar experimentalmente,
traduz o efeito do sistema sobre um sinal exponencial peri´dico e i (t) de
o
frequˆncia 2πi/T .
e
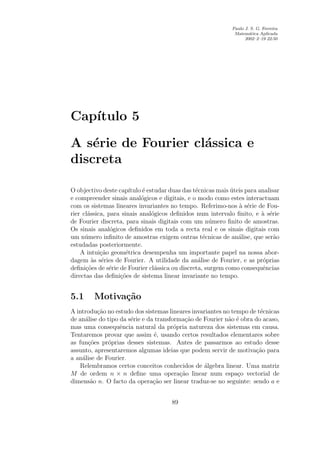
5.8 Exemplos
Considere-se o sinal definido por
+π/4 se 0 < t ≤ π,
f (t) = 0 se t = 0, (5.14)
−π/4 se − π ≤ t < 0.
Determinemos os coeficientes cn da sua expans˜o em s´rie de Fourier no
a e
intervalo [−π, π].
´ a
E f´cil ver que c0 ´ zero, porque o valor m´dio de f (t) ´ zero. Os restantes
e e e
coeficientes cn s˜o dados por
a
+π
e−jnt
cn = f (t) √ dt
−π 2π
115
28. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.8 Exemplos 116
1
0.8 f(x)
sin(x)
sin(3x)/3
0.6 sin(5x)/5
sin(x)+sin(3x)/3+sin(5x)/5
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
-3 -2 -1 0 1 2 3
Figura 5.4: Os trˆs primeiros termos da s´rie de Fourier do sinal f (t) definido
e e
por (5.14), e a respectiva soma.
π
π sin nt
= −2j √ dt
0 4 2π
√
2π π
= sin nt dt
4j 0
√
2π 1 − cos nπ
= .
4j n
Logo,
0 n par,
cn = √
2π 2
4j n
n´ımpar.
A expans˜o de f (t) ´
a e
√
2π 2 ej(2k+1)t
f (t) = √
k∈ §
4j 2k + 1 2π
1 1
= ej(2k+1)t
2j k∈ §
2k + 1
+∞
1 1
= ej(2k+1)t − e−j(2k+1)t
2j k=0
2k + 1
116
29. Paulo J. S. G. Ferreira
Matem´tica Aplicada
a
2002–2–19 22:50
5.8 Exemplos 117
1 1
0.8 0.8
0.6 0.6
f(t) f(t)
0.4 1 0.4 3
0.2 0.2
0 0
-0.2 -0.2
-0.4 -0.4
-0.6 -0.6
-0.8 -0.8
-1 -1
-3 -2 -1 0 1 2 3 -3 -2 -1 0 1 2 3
1 1
0.8 0.8
0.6 0.6
f(t) f(t)
0.4 13 0.4 25
0.2 0.2
0 0
-0.2 -0.2
-0.4 -0.4
-0.6 -0.6
-0.8 -0.8
-1 -1
-3 -2 -1 0 1 2 3 -3 -2 -1 0 1 2 3
Figura 5.5: Somas parciais da s´rie de Fourier do sinal f (t) definido por
e
(5.14), incluindo harm´nicos de frequˆncias 1, 2, 7 e 13 vezes a frequˆncia
o e e
fundamental.
+∞
1 1
= ej(2k+1)t − e−j(2k+1)t
2j k=0
2k + 1
+∞
sin(2k + 1)t
= .
k=0
2k + 1
Neste caso a soma da s´rie ´ a fun¸ao f (t), pelo que a utiliza¸ao do sinal de
e e c˜ c˜
igual se justifica.
Como vemos, os coeficientes cn de ´ ındice n par s˜o nulos, e a expans˜o
a a
s´ cont´m harm´nicos cuja frequˆncia ´ um m´ltiplo ´
o e o e e u ımpar da frequˆncia
e
fundamental.
As somas parciais da s´rie de Fourier de f (t) s˜o definidas por
e a
n
sin(2k + 1)t
s2n+1 (t) = .
k=0
2k + 1
Constituem uma aproxima¸ao a f (t), realizada a custa da sobreposi¸ao de
c˜ ` c˜
117