Uncertainty Problem in Control & Decision Theory
•
1 gefällt mir•868 views

AACIMP 2010 Summer School lecture by Viktor Ivanenko. "Applied Mathematics" stream. "On the Models of Uncertainty in Decision and Control Problems" course. Part 1. More info at http://summerschool.ssa.org.ua

Empfohlen
Weitere ähnliche Inhalte
Andere mochten auch
Andere mochten auch (20)
Mehr von SSA KPI
Mehr von SSA KPI (20)
Kürzlich hochgeladen
Kürzlich hochgeladen (20)
Uncertainty Problem in Control & Decision Theory
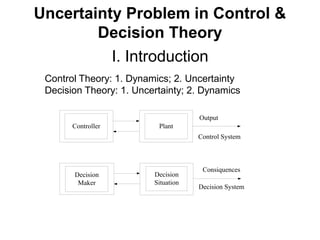
- 1. Uncertainty Problem in Control & Decision Theory I. Introduction Control Theory: 1. Dynamics; 2. Uncertainty Decision Theory: 1. Uncertainty; 2. Dynamics Output Controller Plant Control System Consiquences Decision Decision Maker Situation Decision System
- 2. Two examples DP Example 1. Action (Decision) L H, N S B, N L H, B, G, N R G, N S H, B, G, N R H, B, G, N Student 1: B>H, B>G, H>G Student 2: G>B, G>H, H>B Uncertainty Problem in Control & Decision Theory
- 3. Two examples DP Example 2. Experiment (Observation) Experiment Observation H E S H C11 C12 C13 E C21 C22 C23 S C31 C32 C33 C11> C12, C11> C13 C22> C21, C22> C23 C33> C31, C33> C32 Example 1 є Class of non-parametric DSituations. Example 2 є Class of parametric DSituations. Uncertainty Problem in Control & Decision Theory
- 4. II. Mathematic Model of DSituation. U - the set of decisions u U ; ( A) C - the set of consequences c C ( ) - the multivalued mapping :U C, (u) C, u U - the set of parameters g ( , ) - some mapping g :( U) C U , C, ( ) , Л U , C , Cu C , u U ; Л - Lottery Scheme (non-parametric DS) M ( , U , C, g ( , )), g ( , u) C, ,u U М - Matrix Scheme (parametric DS) Uncertainty Problem in Control & Decision Theory
- 5. Л М !????? 1) 2) М Л, ,U , C , g ( , ) ; Л М ; (U , C , ( )); ( М ) Л (u) g ( , u) : , u U; C : (u) (u), u U : ZМ ( , , , ) ZЛ ( , , , ) g ( , u) (u), , u U М Л : Л М ( Л ) Л T1. Class of DS whose schemes representable in matrix form coinsides with the class of DS whose schemes representable in a lottery form. (V.I. Ivanenko, B. Munier, 2000) (V.I. Ivanenko, V. Mikhalevich, 2007) Uncertainty Problem in Control & Decision Theory
- 6. Uncertainty, necessary condition ( ) but not sufficient! P in Z М MМ ( Z М , P) Data on the uncertainty Q in Z Л MЛ ( Z Л , Q) Q Qu , u U Strict certainty Strict uncertainty Stochastic uncertainty Uncertainty Problem in Control & Decision Theory
- 7. For Stochastic Uncertainty: MЛ U , (C , ), u ,u U MЛ MМ MМ ( , , ),U , (C, ), g ( , ) MМ MЛ (M Л ) МЛ T.2. Class of DS whose mathematic models representable in matrix form coinsides with the class of DS whose mathematic models representable in a lottery form. (V. Ivanenko, V. Mikhalevich, 2007) M DS { M , P} M , L( , ) - utility function, L( , u ) R1 C M ( ,U , L, P). P - some regularity of uncertainty Uncertainty Problem in Control & Decision Theory
- 8. III. Mathematic Model of Decision Maker ~ 1. c C C c - the Binary Relation on C o 2. First Optimization Problem c C ~ 3. u U U 4. Second Optimization Problem uo U №3 is the essence of Decision Making under Uncertainty. Uncertainty Problem in Control & Decision Theory
- 9. Strict certainty: g :U C; co C 1 g :C U ; co uo U Strict uncertainty: The choice of u is not unique! M - the Set of DS ~ C U - Projector or Criterion Choice Rule (CCR) - the set of all possible projectors ~ ~ C, U, Uncertainty Problem in Control & Decision Theory
- 10. IV. General Decision Problem Definition. CCR is any mapping ( ) Z define on , , * and associate to any Z some real function LZ ( ) define on U . Class of all CCR denote by o( ) ( ) all CCR’s that satisfied to the next three conditions: C1. If Zi ( ,U i , Li ) ( ) (i 1,2), U1 U 2 , L1 ( , u ) L2 ( , u ) at all u U1 , , then L* (u ) L* (u ), at all u U1. Z1 Z2 C2. If Z ( ,U , L) ( ) u1, u2 U , then from the inequality L( , u1 ) L( , u2 ) * at all , follows LZ (u1 ) L* (u2 ), and from a, b R, a 0, Z * L( , u1 ) a L( , u2 ) b at all , follows Lz (u1 ) a L* (u2 ) b. z C3. If Z ( ), u1 , u 2 , u3 U and L( , u1 ) L( , u2 ) 2 L( , u3 ), then L* (u1 ) L* (u2 ) z z 2 L* (u3 ). Z Uncertainty Problem in Control & Decision Theory
- 11. E.Borel A.Kolmogorov Random 60 in Broad Sense Random Stochastic Events Events 30 XX Statistically frequency unstable events. 0011000000 111111 000000000000 }f (k) the set of points f(1)=f(0)=1/2 f(1)=1/4 f(0)=3/4 V. Ivanenko, B. Munier, I.Zorich (2000) Uncertainty Problem in Control & Decision Theory
- 12. PF ( ) { p (2 [0,1]) : p( ) 1, p( A B) p( A) p( B A) A, B } p( ) - the set of all closed (in some topology) subsets p PF ( ) - the regularities of uncertainty. : p( ) ( ) Z if p P( ), Z ( p), Z ( ) ( Z ) L* ( ), then p Z P L* ( ) sup L( , u ) p(d ) Z u U p P T.3. p( ) o( ) ( Z , P) S General DP (V. Ivanenko, V. Labkovsky, 1986,2005) L* ( ) Z (V. Ivanenko, B. Munier, 2000) Uncertainty Problem in Control & Decision Theory