

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (14)
Similar a 102098844 alineamiento
Similar a 102098844 alineamiento (20)
102098844 alineamiento
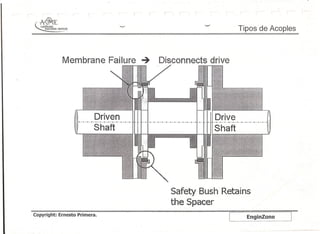
- 1. r ~~ICONTINUING EDUCATION INSTITUTE ,-',>'<'" .•••.• '"-" I I "-'" Tipos de Acoples '. Membrane Failure ~ Disconnects drive Driven 'r'-'-'-'-'-'-'-'-'- M t ~ I I t ~1t, Shaft -------1- --- m _um_ ----- --IQ-h;'::i~ - -- -- - ---14 Safety Bush' Retains the Spacer Copyright: Ernesto Primera. I EnginZone I,
- 2. ( f M~~~-:r CONllNUING EDUCATION INSTfTUTE ..-,_0 v ; ",--,. -.,.; Analisis de Desalineacion f r Principios .. Analisis espectral: ~ Multiples lecturas de amplitudes radiales, muestra la naturaleza sumamente direccional de la vibracion. ~ Alta amplitud de vibracion en la direccion axial. Para el caso de Desalineacion Para leia no muestra alta amplitud. Copyright: Ernesto Primera. I EnginZone i
- 3. ""'0' [ I M~I~-=r Wr,TlNUING EDUCATION INSTlTUTf '-" ,[ '--' r r PrincipioS' ., R:~··rJe·>·ide'ill! 'Ct'''Cr'--I'io!!,n;m!drIe",11'''Crm'-Oi;':nt'S····'·u'imrr '0:. d·rIe",e·''nt·,e",rrigrilillay! , ,•. i .. , ' :. J" .: ", '. 'i' "" ' , , , j • j . , •...., .•.....• j , ••....." j . i j ,-' , ~..l " ",,;./.-_.j ..J.:_y-,"~ _-1 __v.<c,oY' "<.,,,w/.J -_.. ~,•.v.J.J ..;;,,~vJ -._..,<_.j-'/ _J -,.,.,~-;/ _u,.,.;·f' .J __.J ""'N,,,d __.,,,_,._J ,j ,::1 ~)._,<_ff ) ,..-1 '>w;.,·,J __..,,,,/ ~J.j.~"j ~J.:_.4) ,J ---.c_,' _u,~ ••••••••••••••••••••••• Calculo del ahorro de en erg fa = (Corriente Antes - Despues) * Voltios * Factor de Potencia * 1.732 => 1000 (36A-32A) *460V * 0.92 * 1.732 1000 = 2.931 KW 2.931 KW * 8400 hr * $0.065/KWhr = $1 ,600 Copyright: Ernesto Primera. I EnginZone 1
- 4. r I .M<:"c I Principios WNl1NUING ,'~====================~~~~ . ~- --- "- ~. R-~aducci6ndal! consU'mo da anarg'faJ __~ r."J!~~'_.;(.~.~J __~~~ J ~~J~' J ~,_~f,i J I,,~.~I._,J Id J ') !,,"J~! ~ J J~: J ':J J '~:l ••••••••••••••••••••••• " ) " Los datos de placa son: Antes de alinearlo Despues de alinearlo Reducci6n: Copyright:. Ernesto Primera. 30 HP 460V 0.92 Power factor 36 Am ps - 32 Amps --AArr1p5- I EnginZone I
- 5. I , .. , (r r r r r ( ' .. I ., r r "-1';"""1"£ I ':' I I I I ( r Pre-Ahneaclon CONTINUING ================EDUCATION INSr~UTE ==============--./''-' Conceptos a Tomar en Cuenta Durante fa Afineacion 1. Un ACOPLE FLEXIBLE no corrige ni com pens a la desalineacion entre maquinas, esto es una Frase dada por los sup lido res y los fabricantes de acoples. EI rol del acople flexible es: ~ Transmitir potencia. ~ Adaptarse a los limites de desalineacion. ~ Compensar el movimiento final y axial. 2. La no existencia de una base perfecta mente rfgida. '. Copyrig~t: Ernesto Primera. I EnginZone I
- 6. '. [' -Ar'"~t: [ , '- CONP~~~'m' ,.,c~~~~E '--" -- f [ f Pre-Alineaci6n Requerimientos de Pre-alineacion Correccion de pata Coja: Paso 1) Paso 2) Medir el espacio 'exacto I! t I 1 J Chequear con un indicador !! Paso 3) Rellenar con lainas Copyrigh~: Ernesto Primera. I Engi~zon~---l
- 7. r - , - -ft!)T'" LCOf<llNUING EDUCATION INSmUll .-¥-,,,,,",," '--'" .r-' r- r- r-J r- r- . j - r- r- c-. I:"'"':'" ~ c.... Metoda Laser Crecimiento Termico A =f 17" Temp. No. Opera = 60 F a Temp. Operativa = 96,3 F a Cambia Temp. = 36,3C a Material Faeta r Termi(mils/in-def F)Acero 0.006 - 0.007 . Hierro 0.005 Fundido Aluminio 0.013 Bronce 0.010 Crecimiento = (Altura)x(Cambio Temp.)x(Factor termico) Crecimiento = 17" X 36.3 F X 0.006 mils/in- F = 4 mils Crecimiento = 4 mils, en este punto de apoyo. Copyright: Ernesto Primera. EnginZonc
- 8. ( r r 7¥)-r J CCONTINUING EDUCATION INSTHUlt ----=-_.~."w. ...../ "--../ r r r r- r- r- r- r- r c-- r c= q Metoda Laser Crecimiento Termico DETERMINACION DEL CRECIMIENTO TERMICO: Donde: E = Expansion en mils. T = TemperatUra en of. L = distancia vertical entre la base plana y el centro d.el eje (en pulgadas) C = coeficiente de dilataci6n termica dependiendo del tipo de material. E==T*L*C Copyright: Ernesto Primera. EnginZone
- 9. r-- r-~r- r, '.1 I I L CONTINUING lDUCAIiON INSTlIU1E -,-- i - "- r- r -, r r r I ) r r r I Metoda Laser Crecimiento Termico DETERMINACION DEL CRECIMIENTO TERMICO: ~ Medir la temperatura en una linea de cada soporte de ambas maquinas a alinear, desde el fondo hasta la linea central del eje, a intervalos iguales. EI valor de la temperatura a considerar, sera el promedio de varios puntos. ~ Seleccionar el tipo de material can el cual son construidos 105 soportes, determinar el crecimiento termico. Para hallar el crecimiento total, multiplicar el crecimiento unitario por la distancia entre la base del soporte y la linea central del eje. Copyrigh~: Ernesto Primera. EnginZone
- 10. i -A~i>.:tJlL co/-alNulNG EDUCATION INST1IUIl .......-"'- ( ( r Metoda Borde - Borde Alineacion con el Metodo Borde - Borde "Comparadores invertidos" FORMA DE MONTAJE DE LOS COMPARADORES: Copyrigh~: Ernesto Primera. I EnginZone I
- 11. I ( r r Metoda Borde - Cara / '1f~;;NrE r r '- CON:~~~~~'n'","'"~~~TE ,,---,,========= __F=======~~ " Alineacion con el Metodo Borde - Cara • 9'-'. _:'$encilloy Simultaneo" ~~~ ~DD( . CARA Y CORONA: Es el metodo tradicional y mas popular. Consiste en tamar lecturas de desviaci6n, tanto en la cara, como en la periferia del extrema de un eje, en el lado del acoplamiento can respecto a otro eje, can el cual se desea alinear. Su usa es aplicable para aquellos equipos en 105 cuales, por 10 menDs uno de sus ejes, no puede ser girado, bajo riesgo de incurrir en errores de excentricidad y ser afectado por movimientos axiales. Requiere ademas, que el acoplamiento sea desconectado. Puede lIevarse a cabo usando un solo indicador, pero resulta un tanto laborioso tener que reubicarlo repetidas veces. Copyright: Ernesto Primera. I EnginZone i
- 13. ( M~~":.I CONTlNUING EDUCATION INSTTlUTE •••.¥ •••• '--' ( [ ( Metoda Borde - Cara Alineaclon con el Metodo Borde- Cara "Sencillo y Simultaneo" BORDE Y CARA BASADO EN FORMULAS (Alineacion CamLin): ~ Calcula de Carreccion Angular: S· A .A x angularida dup == . D B x angularida d D A = Distancia existente entre la pata cercana hasta donde esta palpando el comparador de forma (radial 0 axial). B = Distancia existente entre la pata lejana hasta donde esta palpando el comparador de forma (radial 0 axial). o = Diametro del acople (diametro descrito por el comparador. SupB B A D Copyright: Ernesto Primera. I EnginZone I
- 14. r .1LG~v/n-'I I } J r CONTINUING EDUCAnON INSTITUTE •••.•.• ,......._N. '---" -.J I r r r Metoda Borde - Cara ., AIIi1eacion con el Metoda Borde - Car a "Sencillo y Simultaneo" BORDE Y CARA BASADO EN FORMULAS (Alineaci6n Com un): ~ Calculo de Correccion vertical 0 horizontal: EI indicador debe montarse sobre el borde de una de las mitades del acoplamiento, luego efectuar la rota cion del eje de (0 a 1800 grados). La diferencia entre las dos lecturas tomadas a 180° grados de separaci6n se divide en dos para ,obtener el, desplazamiento de un eje con respecto al otro. Copyright; Ernesto Primera. I EnginZone I
- 15. r {.;~,~-= I COfillNUING EDUCATION INSmUTt '---' "--" r , r [, r r (Metoda ljorde - Cara '. SupA Alineacion con el Metodo Borde - Cara "Sencillo y Simultaneo" BORDE Y CARA BASADO EN FORMULAS (Alineacion simultanea de la angular y la radial): A x angularida d Valor neto de la radial D 2 SupB B x angularida d Valor neto de la radial D 2 A = Distancia existente entre la pata cercana hasta donde esta palpando el comparador de forma (radial 0 axial). B = Distancia existente entre la pata lejana hasta donde esta palpando el comparador de forma (radial 0 axial). D = Diametro del acople (diametro descrito por el comparador. Copyright,: Ernesto Primera. ~~ B I EnginZone I
- 16. r / -fT!~E r ( CONIINUING EDUCATION INSTITUTE - ~...•. I ,,--/ .« I Metoda Borde - Cara '. Alineacion con el Metodo Borde - Cara "Sencillo y Si/1Jultaneo" CARA A CARA SEPARADA: Se utiliza para la ,alineaci6n, donde el equipo conductor se halla muy separado del conducido, tal es el casa de 105 ventiladares de las torres de enfriamiento. Dos indicadores se instalan para leer en el reverse de las caras de las bridas de acoplamiento. No debe ser usado en aplicaciones donde no existen distanciador de acoplamiento. Ademas, se presenta la desventaja de ser afectada par 105 movimientos axiales de los ejes. Copyright: Ernesto Primera. I EnginZone I
- 17. .--Af''1~I I CONTINUING EDUCAnON INsmuTC ',,---, r ( I I ( Metoda Borde - Cara ·, Alineacion con el Metodo Borde - Cara "5encillo y 5imultaneo" A continuacion se describen 105 metodos principales: >- Alineacion can el calibrador. >- Cara a cara separada. >- Cara y corona. >- Alineacion con el metodo borde - cara basado en formulas. >-Alineacion con el metodo borde - cara basado en graficos. >- Alineacion con el metodo borde - cara "Comparadores Invertidos" basado en formulas. >- Alineacion con el metodo borde - cara "Campara do res Invertidos" basado en graficos. >- Alineacion con el metodo por rayo laser "Primera y seguda generacion". Copyright: Ernesto Primera. I EnginZone I
- 18. -.lL:1IY'Lr r~J v --'I • LCONTINUING EDUCATION INSTITUTE ._,~.. "--' ~=' ======================= IV. Alineacion por el Metodo Borde - Cara - Borde Cara con formulas. - Borde Cara con graficos. '. Copyrigh~: Ernesto Primera. I EnginZone n __ 1
- 19. , -It rf.~~t:r CONTlNUING ======================;", Ii ~N~~E ;: ~ ! ( (I r ( r r I r fir Pre-AJineaci6n " Inis,trumenitos. para alinear",...1 _1 ..1 .,._....."."f .__",1 ~l "'''~~;_.i ...1 _._J ~Jv",,:-s?J ~U ,,,j.,,,,./ ,_.",,;,;;1" !,..-,,.,>?rJ '''"'~~' ~2 ~1 -.,_~,,;;;'-._~ __",';';"_,~ v~ ,:oJ ~J .-J ""v.",,,/' .....,~. ~y~ ",) ~ ••••••••••••••••••••••• Com par ad or sencillo, borde - Provee la informacion del paralelismo solamente Copyrig,ht: Ernesto Primera. EnginZone I
- 20. f <' -ll' rtW~TE r CONTlNUING EDUCATION INS1l1lm ••---'< '-" "--' r r f I Pre-Alineaci6n '. I' t' t' II~j r I ,,",.. ' r 'I ! r r " ." , i"! ) r ' " .", P""'8..t' r "8'"i 8I j j ',r, ",r (.1 II: ins, ,fUm&Jn· rOS, f '~jrr' fe! Ilini&:ar,."f. ~~ ,"'~ '"/ 'f ~~ ,. ,:1. '';/" .• i ,,-- .. ./ "'" '-- -' ,,,' .. -- ,..I ,,-, ",' ..J ,_~ ",,' .J ,_. ,,~, ,~" .J ,_,'J _""" ",,' ,~" ",., "" ",' _J ",," ,",' ,~"" ,__' ,,' ,...I ''''' ••••••••••••••••••••••• Comparador en el Borde y en la Cara - 2 lecturas proveen la informacion total - Desacoplado, solame:nte Copyright: Ernesto Primera. Com para do res en Revers os - 2 lecturas proveen la informacio,n total - Acoplado: y desacoplado I EnginZone I
- 21. r -N~t: r CONTINUING EDUCATION INSTnUTE ._- '----" r Pre-Alineaci6n " Determinando el Movimiento Necesario de 105 Ejes a Traves de 105 Comparadores c. Barrido de lecturas axiales. Con un sistema fijamos el comparador en uno de 105 ejes, de forma que el palpador se apoye en el otro eje, y girando el eje obtendremos las distintas lecturas del comparador, disponiendo que el palpador observe la cara axial del otro eje. Copyrigh~: Ernesto Primera. , I EnginZone I "
- 22. / ·12..r~k/ r- LUN IINulNG EDUCATION INSHTUJ~ / -'- ====='.-.-L'-' r r r - I r r r r Pre-Alineaci6n '. Tolerancias de Alineacion ANTES DE MEDIR LA DESALINEACION: ~ Limpiar la maquina y sus bases. ~ Inspeccionar algun desgaste de la partes rotativas. ~ Medir en el eje y el acople Run Out. ~ Chequear pata coja. ~ Chequear la condicion de los suplementos. ~ Chequear la tuber fa (esfuerzos, cambios termicos). ~ Medicion de la deflexion. MEDICION DE LA DESALINEACION: ~ Por medio de la tablas de tolerancias, es posible determinar el grado de precision requerido para alinear una maquina rotativa. Copyrigh~: Ernesto Primera. I"~ EnginZone I
- 23. , 'I/ / f1!i'J::. r N)-, IICONTINUING EDUCATION INSTnUTE [ Pre-Alineaci6n Tolerancias de Alineacion t.:J0 ----HO ilL LOG RPt'1: 1125•... ' .. , .. , ...• ,.;., -,.- , " , .•. :.--- """'== .. , '- .. ' .. "' .. ,'- .. ",., -- .. --- .• , . •- •• -••• _ m • _ •• _ 3.ANGLE 0.1V ,OfFSET . 1. 92 /,....... / ~/ ./~ /,....; ,/.".. ~ET~!1J'-'-_'m':~(~~11~L$~-)-----"'--"'!---5.00 ACCEPTABLE EXCEL.LENT ---0~ o M A--1 i'lL G••__'__.··~.. _-... w- L/ EI-.•'...M C H ~ -4__ Copyright: Ernesto Primera. I EnginZone I
- 24. no"t:I '< :::!. I.C ::r' !! m .,;:, m (I) 1"'1' o i:J :::!. 3m .,DJ . 0'00 Q'O:,.- '. '" .._-,: -' '-"',.' ", .':::-._:' .- ...., •.•••..... .:.m •.• ,''''', ~ '.. .Q....•.....······0····0·····"',m"J-". .- .' ... ,: ..- -.-- ..-: ,- :,: ,""".' . ---," , ...• .-.- , .. .. .. .-.-.-.- , ..... , .., ... ,:j."c"-.;.:I ..~,.,.:.''''''''' >:11:::1 '-':' .~' '..",.,: 00000~ .. ~ ..•...• QCOO~ ~~~OOO 3 3 3···•···." , 3'"' f-' o· o :3 :3 1·~~" -,- ·,._·.·.·_··_.u .. _-.········ T.. 1r 1J~"""'5 CD :1> ::s CD ID Q. ~ o~::s
- 25. -+("~"E II «(UN IINUING EDUCATION INSTITUTE "",--",' Pre-Alineaci6n '. Revision de los Requerimientos de Pre- Alineae ion Elaborar una lista de chequeo de acuerdo a 105 requerimientos de pre-alineacion ya mencionados anterior mente. Tambien se debe: 1. AJUSTE DE LA SEPARACION ENTRE COUPLING: que dependera del tipo de acoplamiento. 2. DETERMINACION DE LA TOLERANCIA DE ALINEACION: por medio de tablas de tolerancia, que van en funcion de la velocidad de rotacion y tipo del eje. Copyright: Ernesto Primera. I EnginZone I
- 26. r " --f, rH~~rEr CONTfNUII'G EDUCATION INSTITUIT _.,,.,-~.•.'. '--' ~ Pre-Alineaci6n Revision de losRequerimientos de Pre- Alineacion . -r~ J.- ~, ~~ ~ 3. CHEQUEOS DE LOS EJES, RUN OUT: para evaluar la condicion del eje y 105 componentes del acople (dobles y excentricidad) . Correcto Caida Doblado Fuera de centro Tendran que ser menor a 2 mils de run-out a de excentricidad. Copyrigh~: Ernesto Primera. I EnginZone I
- 27. r / -A rt~I ! '- C~U!~L, ..~~~E "-.--' r I r I Pre-Alineaci6n " Revision de los Requerimientos de Pre- Alineae ion 4. DETERMINACION DE LA FLEXION EN LA EXTENSION DEL APARATO DE ALINEACION: Instalar 105 aparatos de alineacion en una barra 0 tubo, con las extensiones abiertas, a la miSlTfa distancia requerida para la maquina a alinear. Montar los indicadores y ajustarlos a cero cuando se hallen vertical. Rotar la barra 3600 y asegurarse de que las lecturas en los indicadores retornen a cera. De no ocurrir as!, verificar la rigidez del montaje y el correcto funcionamiento de los instrumentos. Copyrigh~: Ernesto Primera. I EnginZone I
- 28. ne'0 f~' ~,~. gz'- ~c • . ~~ ~J7 m ~ z ,!'9 ~tnM-e'tI ' ~ . '~.'/>'k.«~_/,:, ': ::,',~<~ ,~.~;~,</./'.~~1>~.~.~.~-;}~~~~>~:~;~}':-~1~~.~~1.~;k~~~~~<tt1~?1Z~t~.~".:;;:X;;jj. ~ .. ' ~': -'~ ',,~ ':, "', ': '" ';. " " ,;' ",; : " .:?>. f7f.1~" i:~t0.1:i1::1~,?;~~~,%':*i;l~~ "'> , . " .. "'. > , " ,", . ".";"""'~""'d*,J'.~,,,,y,,.!,r,,~",,:<. '·:·S:::' <:~';~;~Ii.~~~.""'IQj. a' ~' ~ 11.· - ro a-~ ~ ~'"'W1J.'%~~J&tJ~~~~'r.;;rJ·.~~~':;;;;;~~~;i~.zm m ~ irt: ~1JIf~_" ""?'01'~'~~~"'&'F ,"a:::~;~7;:~~.;.···· ~ ~ ',. Q' ~' §, rs' ~ ~;;, .. j~~~.4..';i'~(>, '; :''C a-,;jty.v':J.7Q, ~:'~ '~,,' '~:'~t; "i;,;:,,~>: ~ t..-0 ~ ., CDI» ---::JCD Q) -") -.o~::J ~ ~
- 29. I /-ff~t: r r '- CONb~Y~~n •• M-~~U:E .------ r r r r Pre-AJineaci6n '. Determinando el Movimiento Necesario de 105 Ejes a Traves de 105 Comparadores A. Interpretacion del Reloj Comparador. Reloj Comparador de caratula 0 dial, consiste en un palpador retractil que transmite su desplazamiento a una aguja indicadora que gira sobre un circulo graduado. EI movimiento del palpador puede ser tanto hacia el interior como hacia el exterior, haciendo que un caso la aguja gire a la derecha y en otro a la izquierda; las lecturas obtenidas se consider an positivas (+), en el primer caso y son negativas (-) en el segundo caso. Copyright: Ernesto Primera. I EnginZone I ----_----..:.------------------------- - -'-
- 31. ! '-A{t'::M1I r CONTINUING EDUCATION INSTlTUlE ,..•.-' ....-- '--' r r ( r Pre-Alineaci6n " Determinando el Movimiento Necesario de 105 Ejes a Traves de 105 Com para do res B. Barrido de lecturas radiales (horizontal y vertical). Con un sistema fijamos el comparador en uno de los ejes, de forma que el palpador se apoye en el otro eje, y girando el eje obtendremos las distintas lecturas del comparador. En el caso de no existir un error las lecturas van a ser las mismas cada vez que se de un recorrido de 360 grados, normalmente se toman 4 lecturas, una arriba (0 grados), otra a la derecha (90 grados), otra abajo a (180 grados) y por ultimo a (270 grados) y teniendo siempre en cuenta los signos de las lecturas. Copyrigh~: Ernesto Primera. IH __ nE~gi-nzOne I
- 32. .' -A ("~I r CONTlNUING EDUCATION IN5TI1UJE "---" '-'" r r ( r Pre-Alineaci6n ., Determinando el Movimiento Necesario de 105 Ejes a Traves de los Com para do res B. Barrido de lecturas radiales (horizontal y vertical). La magnitud del desplazamiento es la mitad de las diferencias de las lecturas indicadas en los comparadores. Esto es aplicable tanto al desplazamiento vertical como al desplazamiento horizontal, as! cuando hacemos un barrido y obtenemos cuatro lecturas, podemos determinar los desplazamientos radiales, tanto en sentido vertical, como sentidohorizontal. Las lecturas del lade (arriba + abajo) = (derecho y izquierdo). Copyright: Ernesto Primera. I EnginZone I
- 33. /*~Ir '-- (Qi'j ~~~J!1~n"'Iv<~~~E '-.-/ r r [ Pre-Alineaci6n " Oeterminando el Movimiento Necesario de 105 Ejes a Traves de 105 Comparadores A=R+D B=R-D 2D = A - B D = (A - B) Copyright: Ernesto Primera. /"' ) lJ~._J ~~. _~_~.~~~J_~.~LA_~._~.~~~u D ·~·~·_·~·~·_·~·_·-~·~~·f·~·~·t::::J~·~·~·~_·~·~·~·~·_·~·~·~.~.~.Y.~.~._.~.~.~.1:~ B I EnginZone I
- 34. { r "-AC+~I ( ~ coNb~Y,!!l~'n•. "'CT~~~ ( Pre-Alineaci6n Requerimientos de Pre-alineacion 7. DESNIVEL: y Lainclinacion de la maquina no debe exceder 0.0625" por pie, los suplementos deberan ser en forma de cuna y marcados. 8. HERRAMIENTAS: y 1 Espejo con articulaci6n, 1 Nivel de precision. y 1 regia calibrada, 1 Cinta metrica. y 1 Tijera para metal. y 1 Tabla, papel milimetrado (formato), lapiz. y 1 Calculadora de bolsillo. y Tornillos, tuercas, arandelas surtidas, suplementos prefabricados (0.001" - 0.100''). Copyright:, Ernesto Primera. I EnginZone I
- 36. '-' Reliability Sleeve and washer mem bra neunitconstru,ctioin i~ I Membrane Units Copyright: Ernesto Primera. '-' Tipos de Acoples Safety Collar for Overload & Anti-fly protection I~ .__~_~~!~Zone I