2. The 8052 has the following on-chip facilities:
• 4k ROM (EPROM on 8751)
• 128 byte RAM
• USRT
• 32 Input-output port lines
• TWO 16-bit timer/ count
• Six interrupt sources and
• On-chip clock oscillator and power –on- reset circuitry.
The other members of this family, such as 8053, have one extra timer/counter, 8k
ROM/EPROM and 256 byte RAM, while 8031and 8032 are corresponding ROM-less versions
of 8052,respectivily. All these are also available in CMOS versions. The 8051 family includes a
large numbers of members from many manufacturers.
SALIENT FEATURES
The 8051 can be configured to bypass the internal 4k RAM and run solely with external
program memory. For this its external access ( ) pin 31 has to be grounded, which makes it
equivalent to 8031. The program store enable (PSEN) signal acts as read pulse for program
memory. The data memory is external only and a separate RD* signal is available for reading its
contents.
Use of external memory requires that three of its 8-bit ports (out of four) are configured
to provide data/address multiplexed bus, Hi address bus and control signals related to external
memory use. The RXD and TXD ports of UART also appear on pins 10 and 11 of 8051 and
8031, respectively. One 8-bit port, which is bit addressable and extremely useful for control
applications, still remains free for use.
The UART utilizes one of the internal timers for generation of baud rate. The crystal used
for generation of CPU clock has therefore to be chosen carefully. The 3.579MHz crystal;
available abundantly, can provide a baud rate of 1200.
3. The 256-byte address space is utilized by the internal RAM and special function registers
(SFRs)array which is separate from external RAM space of 64k. the 00-7f space is occupied by
the RAM and the 80-FF space by the SFRs. The 128-byte internal RAM has been utilized in the
following fashion:
00-1F: Used for four banks of eight registers of 8-bit each. The four banks may be selected by
soft ware any time during the program.
20-2F: The 16 bytes may be used as 128 bits oriented programs.
30-7F This area is used for temporary storage, pointers and stack. On reset, the stack starts at 08
and gets incremented during use.
PIN DIAGRAM OF 89C52
4.
5. PIN DETAILS OF 8951
VSS - Cir unit ground potential.
VCC - 5-volt power supply input for normal operation and program verification.
PORT 0
Port o is an 8-bit open drain BI directional input output port. It is also the multiplexed
low ordered address and data bus when using external memory. it is used for data output during
program verification Port 0 can sink (and in bus operations can source) 8 LSTTL loads.
PORT 1
Port 1 is an 8 bit quasi bi-directional I/o port. It is also used for low order address byte
during program verification. Port 1 can sink / source 4 LSTTL loads.
PORT 2
Port 2 is an 8 bit quasi bi-directional i/o port. It also emits the high order address byte
when according external memory. It is used for the high order address and the control signals
during program verification. Port 2 can sink / source 4 LSTTL loads.
PORT 3
Port 3 is an 8 bit quasi bi-directional i/o port with internal pull ups. It also serves the
function of various special features of the MCS-51th. Family as listed below:
Port pin Alternate function
P3.0 RXD (serial input port)
P3.1 TXD (serial input port)
P3.2 INTO (external interrupt)
P3.3 INT1 (external interrupt)
P3.4 TO (timer /counter 1 external input)
P3.5 T1 (timer/ counter 1 external input)
6. P3.6 WR (external data memory write strobe)
P3.7 RD (external data memory read strobe)
The output latch corresponding to a secondary function must be programmed to a one (1)
for that function to operate. Port 3 can sink /source 4 LSTTL loads.
RST
A high on this pin for two-machine cycle while the oscillator is running rests the devices.
A small external pull down resistor (=8.2 kilo ohms) from RST to VSS permits power on reset
when a capacitor (=10 microfarad) is also connected from this pin to VCC.
ALE
Address latch enable output for latching the low byte of the during access to external
memory. ALE is activated at a constant rate of 1/6 the oscillator frequency except during an
external data memory access at which time one ALE pulse is skipped. ALE can sink / source 8
LSTTL inputs.
PSEN
The program store enable output for latching the low byte of the during access to external
memory six oscillator periods except during external data memory access PSEN remains high
during internal program memory. Do not float EA during normal operation.
XTAL 1
Input to the inverting amplifier that forms the part of the oscillator and input to the
internal clock generator. XTAL2 receives the oscillator signal when an external oscillator used.
XTAL 2
Output of the inverting amplifier that forms the part of the oscillator and input to the
interval clock generator. XTAL2 receives the oscillator signal when an external oscillator
7. HARDWARE AND SOFTWARE REQUIREMENTS:-
SOFTWARE REQUIREMENTS:-
1) EMBEDDED C PROGRAMMING.
HARDWARE REQUIREMENTS:-
1) 8051 MICROCONTROLLER.
2) DC MOTORS.
3) RF TRANSMITTERS AND RECIEVERS. Etc.
4) LEAD ACID BATTERY 12V
5) BUZZER
6) SENSOR
7) LCD DISPLAY
INTRODUCTION TO MICROCONTROLLER
A micro-controller can be compared to a small stand alone computer, it is a very powerful
device, which is capable of executing a series of pre-programmed tasks and interacting with
other hardware devices. Being packed in a tiny integrated circuit (IC) whose size and weight is
usually negligible, it is becoming the perfect controller for robots or any machines requiring
some kind of intelligent automation. A single microcontroller can be sufficient to control a small
mobile robot, an automatic washer machine or a security system. Any microcontroller contains a
8. memory to store the program to be executed, and a number of input/output lines that can be used
to interact with other devices, like reading the state of a sensor or controlling a motor.
Nowadays, microcontrollers are so cheap and easily available that it is common to use them
instead of simple logic circuits like counters for the sole purpose of gaining some design
flexibility and saving some space. Some machines and robots will even rely on a multitude of
microcontrollers, each one dedicated to a certain task. Most recent microcontrollers are 'In
System Programmable', meaning that you can modify the program being executed, without
removing the microcontroller from its place.
Today, microcontrollers are an indispensable tool for the robotics hobbyist as well as for the
engineer. Starting in this field can be a little difficult, because you usually can't understand how
everything works inside that integrated circuit, so you have to study the system gradually, a
small part at a time, until you can figure out the whole image and understand how the system
works.
The 89C51 is a single chip microcomputer with I/O port, timer, clock generator, Data
memory, program memory stack, ADC and serial ports etc.
8 bit CPU with registers A and B.
16 bit Program Counter and Data Pointer.
8 bit Program Status Word.
8 bit stack pointer.
Internal ROM of 8K bytes.
Internal RAM of 256 bytes, 4 register banks each containing 8registers.
Two 16 bit timer / counter.
Full duplex serial data receiver/transmitter.
Special function registers like TCON, TMOD and SCON etc.
Two external and three internal interrupt sources.
Microcontrollers are used in automatically controlled products and devices such as
automobile engine control systems, home security systems, hotel security and monitoring
systems, remote controls, office machines, appliances, power tools, and toys. By reducing the
size and cost compared to a design that uses a separate microprocessor, memory, and
9. input/output devices, microcontrollers make it economical to digitally control even more devices
and processes.
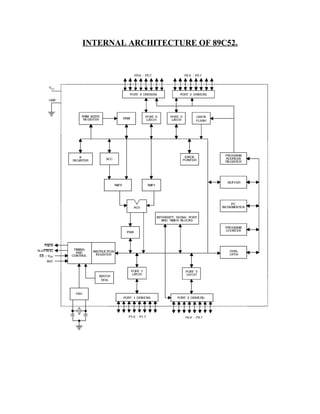
THE 8051 MICROCONTROLLER ARCHITECTURE
The 8051 is the name of a big family of microcontrollers. The device which we are going to use
along this tutorial is the 'AT89S52' which is a typical 8051 microcontroller manufactured by
Atmel™. Note that this part doesn't aim to explain the functioning of the different components of
a 89S52 microcontroller, but rather to give you a general idea of the organization of the chip and
the available features, which shall be explained in detail along this tutorial.
This figures shows the main features and components that the designer can interact with. You
can notice that the 89S52 has 4 different ports, each one having 8 Input/output lines providing a
total of 32 I/O lines. Those ports can be used to output DATA and orders do other devices, or to
read the state of a sensor, or a switch. Most of the ports of the 89S52 have 'dual function'
meaning that they can be used for two different functions: the fist one is to perform input/output
operations and the second one is used to implement special features of the microcontroller like
counting external pulses, interrupting the execution of the program according to external events,
performing serial data transfer or connecting the chip to a computer to update the software.
Each port has 8 pins, and will be treated from the software point of view as an 8-bit variable
called 'register', each bit being connected to a different Input/Output pin.
You can also notice two different memory types: RAM and EEPROM. Shortly, RAM is used to
store variable during program execution, while the EEPROM memory is used to store the
program itself, that's why it is often referred to as the 'program memory'. The memory
organization will be discussed in detail later
It is clear that the CPU (Central Processing Unit) is the heart of the microcontrollers, It is the
CPU that will Read the program from the FLASH memory and execute it by interacting with the
different peripherals discussed above.
10. the pin configuration of the 89S52, where the function of each pin is written next to it, and, if it
exists, the dual function is written between brackets. The pins are written in the same order as in
the block diagram of figure 1.2.A, except for the VCC and GND pins which I usually note at the
top and the bottom of any device. Note that the pin that have dual functions, can still be used
normally as an input/output pin. Unless you program uses their dual functions, All the 32 I/O
pins of the microcontroller are configured as input/output pins.
Most of the function of the pins of the 89S52 microcontroller will be discussed in detail, except
for the pins required to control an external memory, which are the pins number 29, 30 and 31.
Since we are not going to use any external memory, pins 29 and 30 will be ignored through all
the tutorial, and pin 31 (EA) always connected to VCC (5 Volts) to enable the micro-controller
to use the internal on chip memory rather than an external one .
11.
12.
13.
14.
15.
16.
17. PIN DIAGRAM OF MICROCONTROLLER (8051)
PIN DETAILS OF 8051
The on-chip oscillator of 8031 can be used to generator system clock. Depending upon
version of the device, crystals from 3.5 to 12 MHz may be used for this purpose. The system
18. clock is internally divided by 6 and the resultant time period becomes one processor cycle. The
instructions take mostly one or two processor cycles. The ALE (address latch enable) pulse rate
is 1/6th
of the system clock, except during access of internal program memory, and thus can be
used for timing purposes.
The two internal timers are wired to the system clock and persecuting factor is decided by
the software apart from the count stored in the two bytes of the timer control registers. One of the
counters, as mentioned earlier, is used for generation of baud rate clock for the UART. It would
be of interest to point out that the 8052 has a third timer which is usually used for generation of
baud rate.
VSS
Circuit ground potential.
VCC
5-volt power supply input for normal operation and program verification.
PORT 0
Port o is an 8-bit open drain BI directional input output port. It is also the multiplexed
low ordered address and data bus when using external memory. it is used for data output during
program verification Port 0 can sink (and in bus operations can source) 8 LSTTL loads.
PORT 1
Port 1 is an 8 bit quasi bi-directional I/O port. It is also used for low order address byte
during program verification. Port 1 can sink / source 4 LSTTL loads.
PORT 2
Port 2 is an 8 bit quasi bi-directional I/O port. It also emits the high order address byte
when according external memory. It is used for the high order address and the control signals
during program verification. Port 2 can sink / source 4 LSTTL loads.
PORT 3
Port 3 is an 8 bit quasi bi-directional I/O port with internal pull ups. It also serves the
function of various special features of the MCS-51th.
Family of alternate functions are listed below
19. P3.0 RXD (serial input port)
P3.1 TXD (serial input port)
P3.2 INTO (external interrupt)
P3.3 INT1 (external interrupt)
P3.4 TO (timer /counter 1 external input)
P3.5 T1 (timer/ counter 1 external input)
P3.6 WR (external data memory-write strobe)
P3.7 RD (external data memory read strobe)
The output latch corresponding to a secondary function must be programmed to a one (1)
for that function to operate. Port 3 can sink /source 4 LSTTL loads.
RST
A high on this pin for two-machine cycle while the oscillator is running rests the devices.
A small external pull down resistor (=8.2 kilo ohms) from RST to VSS permits power on reset
when a capacitor (=10 microfarad) is also connected from this pin to VCC.
ALE
Address latch enable output for latching the low byte during access to external memory.
ALE is activated at a constant rate of 1/6 the oscillator frequency except during an external data
memory access at which time one ALE pulse is skipped.
PSEN
The program store enable output for latching the low byte of the during access to external
memory six oscillator periods except during external data memory access PSEN remains high
during internal program memory. Do not float EA during normal operation.
XTAL 1
Input to the inverting amplifier that forms the part of the oscillator and input to the
internal clock generator. XTAL2 receives the oscillator signal when an external oscillator used.
XTAL 2
20. Output of the inverting amplifier that forms the part of the oscillator and input to the
interval clock generator. XTAL2 receives the oscillator signal when an external oscillator used.
Power Supply
The AT89C52 operates with a single +5V power supply. It consists of two power supply
pins Vcc and Vss. Power supply is given to Vcc with respect to Vss, which is power supply ground.
Reset Circuit
In AT89C52 the reset input is RST pin. A reset is accomplished by holding the RST pin
high for atleast two machine cycles( 24 oscillator periods), while the oscillator is running. The
CPU responds by generating an internal reset with the timing.
The reset in AT89C52 is positive active, which means that the processor runs when the
reset pin is held low. This is in contrast to the other devices that all have a negatively active
reset. The AT89C51 has an internal pull down and RC delay circuit built in to delay the
processor setup until the built in oscillator operation has stabilized.
Program Memory
Up to 8 Kbytes of the program memory can reside on the chip. In addition the device
addresses up to 64 Kbytes of program memory external to the chip.
Data Memory
This microcontroller has a 256 on-chip RAM. In addition it can address up to 64K bytes
of external data memory.
INSTRUCTION SET
Moving Data
Mnemonic Operation
MOV A, #n Copy the immediate data byte n to the A register
MOV A, Rr Copy data from register Rr to register A
MOV Rr, A Copy data from register A to register Rr
MOV Rr, #n Copy the immediate data byte n to register Rr
MOV DPTR, #nn Copy the immediate 16-bit number nn to the DPTR register
21. LOGICAL OPERATIONS
Mnemonic Operation
MOV A, #OF1h Move the immediate data byte F1h to the A register
MOV A, RO Copy the data in register RO to register A
MOV DPTR, #0ABCDh Move the immediate data bytes ABCDh to the DPTR
MOV R5, A Copy the data in register A to register R5
MOV R3, # 1 Ch Move the immediate data byte 1Ch to register R3
CAUTION
• It is impossible to have immediate data as a destination.
• All number must star with a decimal number (0-9), or the assumes the number is a
label.
• Register-to-register moves using the register addressing mode occur between register
A and RO to R7.
Mnemonic Operation
RL Rotate a byte to the left; the Most Significant Bit (MSB) becomes the Least
Significant Bit (LSB)
RLC Rotate a byte and the carry bit left; the carry becomes the LSB, the MSB
becomes the carry
RR Rotate a byte to the right; the LSB becomes the MSB
RRC Rotate a byte carry to the right; the LSB becomes the carry, and the carry the
MSB
SWAP Exchange the low and high nibbles in a byte
23. Conditional Jumps
Mnemonic Operation
JC radd Jump relative if the Carry flag is set to 1
JNC radd JUMP relative if the Carry flag is reset to 0
JB b, radd JUMP relative if addressable bit set to 1
JNB b, radd JUMP relative if addressable bit is set, and clear the
addressable bit to 0
Unconditional Jumps
Mnemonic Operation
JMP @A+DPTR Jump to the address formed by adding A to the DPTR; this is
an unconditional
Jump and will always be done; the address can be anywhere
in program
memory; A, the DPTR, and the flags are unchanged
AJMP sadd Jump to absolute short range address sadd; this an unconditional jump
and is always taken;no flags are affected
LJMP sadd Jump to absolute long range address ladd; this is an unconditional
jump and is always taken; no flags are affected
SJMP radd Jump to relative address radd; this is an unconditional jump and is
always taken; no flags are affected
NOP Do nothing and go to the next is instruction; NOP (no operational) is
used to waste time in a software timing loop, or to leave room in a program for later
additions; no flags are affected
• DJNZ decrements first, then check for 0. A location set to 00h and then decremented
goes to FFh, then Feh, and so on, down to 00h.
24. • CJNE does nor change the contents of any register or RAM location. It can change
the Carry flag to 1 if the destination byte is less than the source byte.
• There is no zero flag; the JZ and JNZ instructions check the contents of the A register
for 0.
• JMP @A+DPTR does not change A, DPTR, or any flags,
• The student version of A51 will not assemble more than 400h bytes of code (0000to
03FFh). Addresses greater than 03FFh are not assembled.