
Recommended
More Related Content
Viewers also liked
Recently uploaded
Recently uploaded (9)
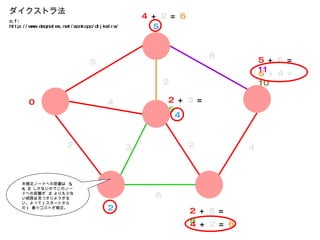
Dijkstra Algorithm
- 1. 2 3 4 5 6 2 2 6 4 5 4 2 未確定ノードへの距離は 5, 4, 2 しかないのでこのノードへの距離が 2 よりも少ない経路は見つかりようがない。よって ( スタートからの ) 最小コストが確定。 2 + 6 = 8 2 + 3 = 5 4 + 2 = 6 4 + 2 = 6 5 + 6 = 11 6 + 4 = 10 ダイクストラ法 c.f: http://www.deqnotes.net/acmicpc/dijkstra/ 0